 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCLIPPER+: A Fast Maximal Clique Algorithm for Robust Global Registration
Feb 23, 2024



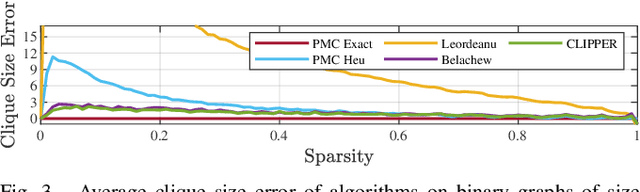
We present CLIPPER+, an algorithm for finding maximal cliques in unweighted graphs for outlier-robust global registration. The registration problem can be formulated as a graph and solved by finding its maximum clique. This formulation leads to extreme robustness to outliers; however, finding the maximum clique is an NP-hard problem, and therefore approximation is required in practice for large-size problems. The performance of an approximation algorithm is evaluated by its computational complexity (the lower the runtime, the better) and solution accuracy (how close the solution is to the maximum clique). Accordingly, the main contribution of CLIPPER+ is outperforming the state-of-the-art in accuracy while maintaining a relatively low runtime. CLIPPER+ builds on prior work (CLIPPER [1] and PMC [2]) and prunes the graph by removing vertices that have a small core number and cannot be a part of the maximum clique. This will result in a smaller graph, on which the maximum clique can be estimated considerably faster. We evaluate the performance of CLIPPER+ on standard graph benchmarks, as well as synthetic and real-world point cloud registration problems. These evaluations demonstrate that CLIPPER+ has the highest accuracy and can register point clouds in scenarios where over $99\%$ of associations are outliers. Our code and evaluation benchmarks are released at https://github.com/ariarobotics/clipperp.
MIXER: Multiattribute, Multiway Fusion of Uncertain Pairwise Affinities
Oct 15, 2022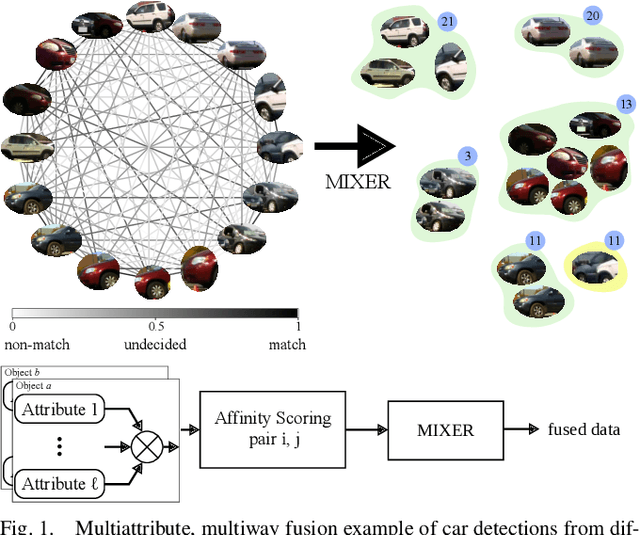
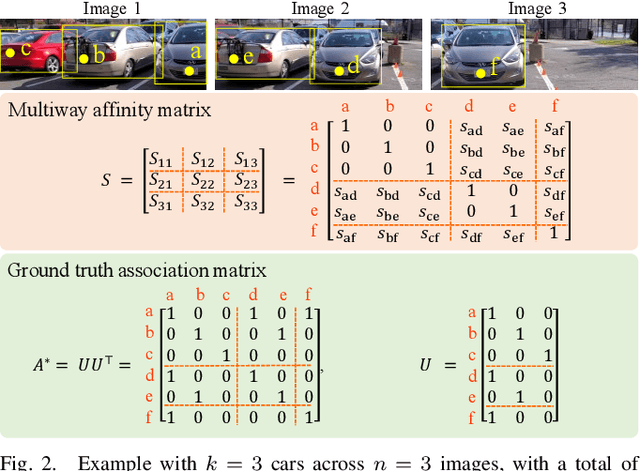
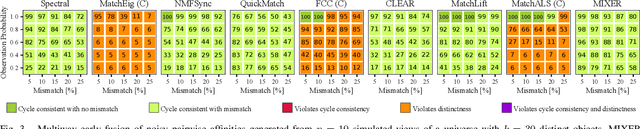
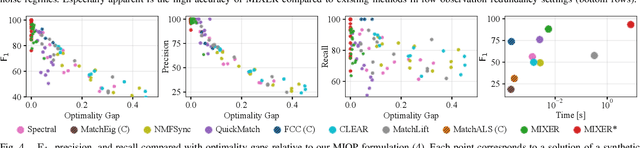
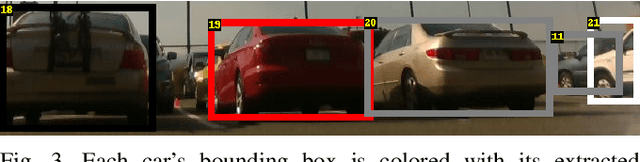
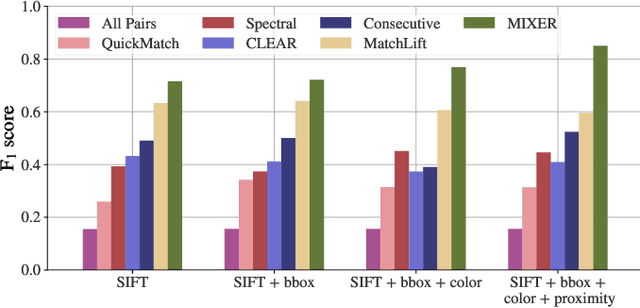
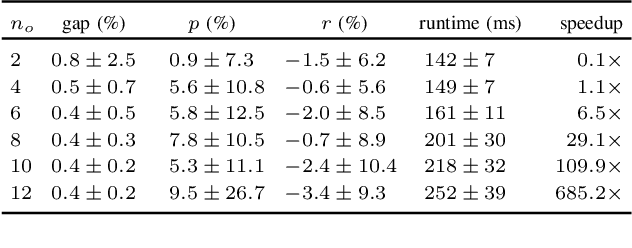
We present a multiway fusion algorithm capable of directly processing uncertain pairwise affinities. In contrast to existing works that require initial pairwise associations, our MIXER algorithm improves accuracy by leveraging the additional information provided by pairwise affinities. Our main contribution is a multiway fusion formulation that is particularly suited to processing non-binary affinities and a novel continuous relaxation whose solutions are guaranteed to be binary, thus avoiding the typical, but potentially problematic, solution binarization steps that may cause infeasibility. A crucial insight of our formulation is that it allows for three modes of association, ranging from non-match, undecided, and match. Exploiting this insight allows fusion to be delayed for some data pairs until more information is available, which is an effective feature for fusion of data with multiple attributes/information sources. We evaluate MIXER on typical synthetic data and benchmark datasets and show increased accuracy against the state of the art in multiway matching, especially in noisy regimes with low observation redundancy. Additionally, we collect RGB data of cars in a parking lot to demonstrate MIXER's ability to fuse data having multiple attributes (color, visual appearance, and bounding box). On this challenging dataset, MIXER achieves 74% F1 accuracy and is 49x faster than the next best algorithm, which has 42% accuracy.
View-Invariant Localization using Semantic Objects in Changing Environments
Sep 28, 2022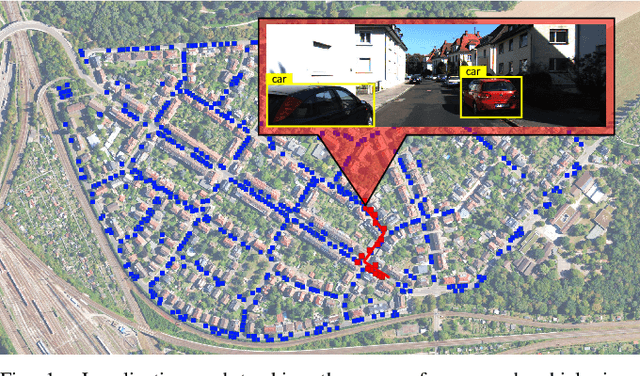
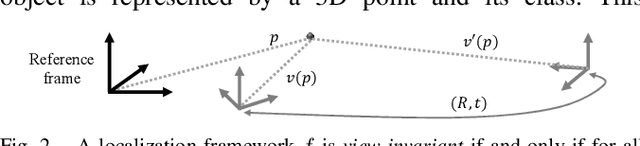
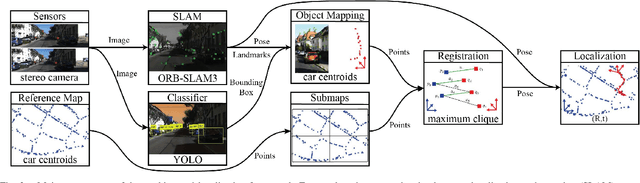
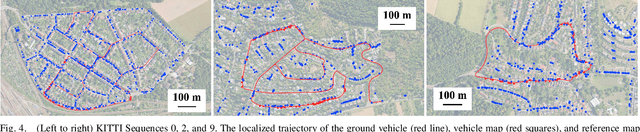
This paper proposes a novel framework for real-time localization and egomotion tracking of a vehicle in a reference map. The core idea is to map the semantic objects observed by the vehicle and register them to their corresponding objects in the reference map. While several recent works have leveraged semantic information for cross-view localization, the main contribution of this work is a view-invariant formulation that makes the approach directly applicable to any viewpoint configuration for which objects are detectable. Another distinctive feature is robustness to changes in the environment/objects due to a data association scheme suited for extreme outlier regimes (e.g., 90% association outliers). To demonstrate our framework, we consider an example of localizing a ground vehicle in a reference object map using only cars as objects. While only a stereo camera is used for the ground vehicle, we consider reference maps constructed a priori from ground viewpoints using stereo cameras and Lidar scans, and georeferenced aerial images captured at a different date to demonstrate the framework's robustness to different modalities, viewpoints, and environment changes. Evaluations on the KITTI dataset show that over a 3.7 km trajectory, localization occurs in 36 sec and is followed by real-time egomotion tracking with an average position error of 8.5 m in a Lidar reference map, and on an aerial object map where 77% of objects are outliers, localization is achieved in 71 sec with an average position error of 7.9 m.
MIXER: A Principled Framework for Multimodal, Multiway Data Association
Nov 29, 2021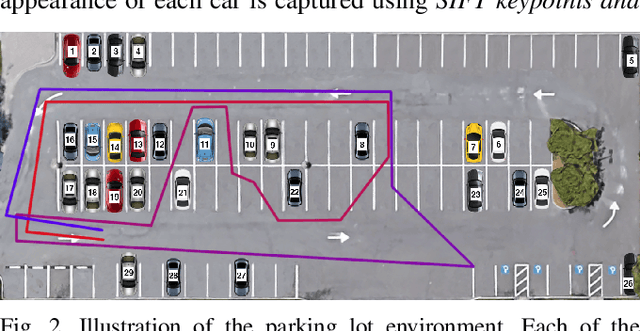
A fundamental problem in robotic perception is matching identical objects or data, with applications such as loop closure detection, place recognition, object tracking, and map fusion. While the problem becomes considerably more challenging when matching should be done jointly across multiple, multimodal sets of data, the robustness and accuracy of matching in the presence of noise and outliers can be greatly improved in this setting. At present, multimodal techniques do not leverage multiway information, and multiway techniques do not incorporate different modalities, leading to inferior results. In contrast, we present a principled mixed-integer quadratic framework to address this issue. We use a novel continuous relaxation in a projected gradient descent algorithm that guarantees feasible solutions of the integer program are obtained efficiently. We demonstrate experimentally that correspondences obtained from our approach are more stable to noise and errors than state-of-the-art techniques. Tested on a robotics dataset, our algorithm resulted in a 35% increase in F1 score when compared to the best alternative.
Multi-Robot Distributed Semantic Mapping in Unfamiliar Environments through Online Matching of Learned Representations
Mar 27, 2021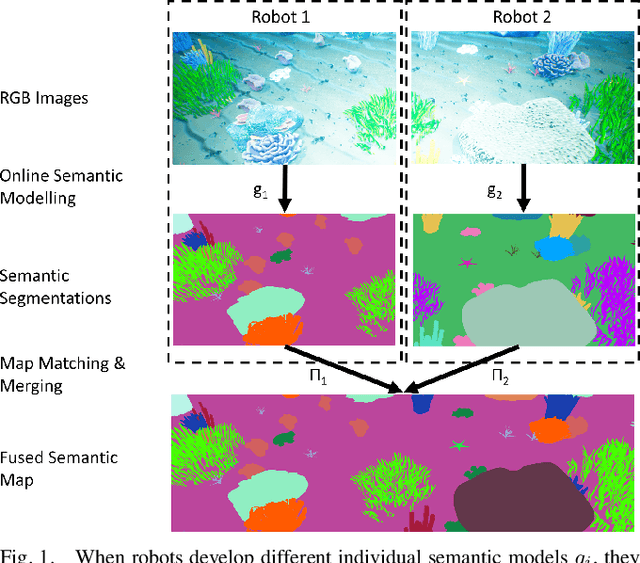
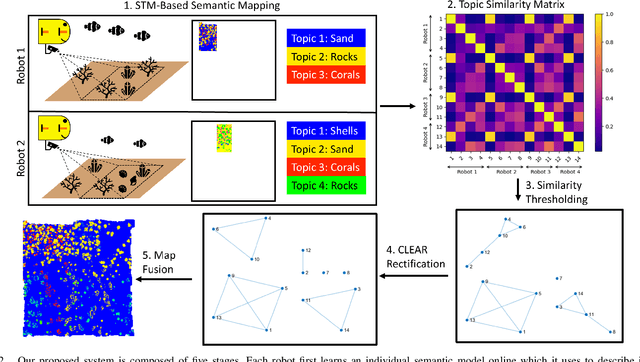
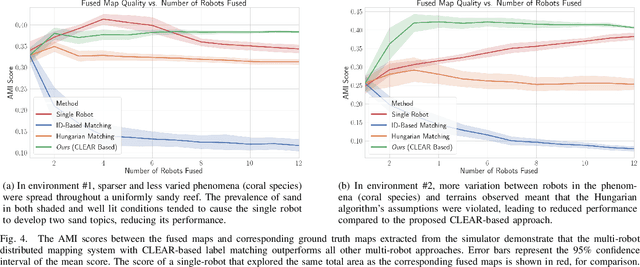
We present a solution to multi-robot distributed semantic mapping of novel and unfamiliar environments. Most state-of-the-art semantic mapping systems are based on supervised learning algorithms that cannot classify novel observations online. While unsupervised learning algorithms can invent labels for novel observations, approaches to detect when multiple robots have independently developed their own labels for the same new class are prone to erroneous or inconsistent matches. These issues worsen as the number of robots in the system increases and prevent fusing the local maps produced by each robot into a consistent global map, which is crucial for cooperative planning and joint mission summarization. Our proposed solution overcomes these obstacles by having each robot learn an unsupervised semantic scene model online and use a multiway matching algorithm to identify consistent sets of matches between learned semantic labels belonging to different robots. Compared to the state of the art, the proposed solution produces 20-60% higher quality global maps that do not degrade even as many more local maps are fused.
CLIPPER: A Graph-Theoretic Framework for Robust Data Association
Nov 20, 2020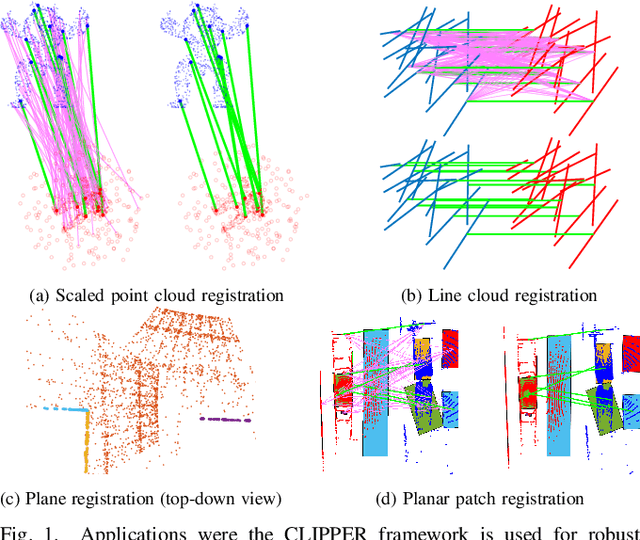

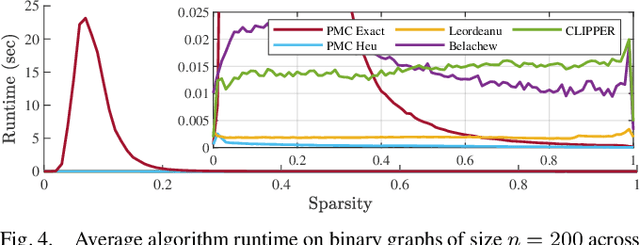
We present CLIPPER (Consistent LInking, Pruning, and Pairwise Error Rectification), a framework for robust data association in the presence of noise and outliers. We formulate the problem in a graph-theoretic framework using the notion of geometric consistency. State-of-the-art techniques that use this framework utilize either combinatorial optimization techniques that do not scale well to large-sized problems, or use heuristic approximations that yield low accuracy in high-noise, high-outlier regimes. In contrast, CLIPPER uses a relaxation of the combinatorial problem and returns solutions that are guaranteed to correspond to the optima of the original problem. Low time complexity is achieved with an efficient projected gradient ascent approach. Experiments indicate that CLIPPER maintains a consistently low runtime of 15 ms where exact methods can require up to 24 s at their peak, even on small-sized problems with 200 associations. When evaluated on noisy point cloud registration problems, CLIPPER achieves 100% precision and 98% recall in 90% outlier regimes while competing algorithms begin degrading by 70% outliers. In an instance of associating noisy points of the Stanford Bunny with 990 outlier associations and only 10 inlier associations, CLIPPER successfully returns 8 inlier associations with 100% precision in 138 ms.
A Distributed Pipeline for Scalable, Deconflicted Formation Flying
Mar 04, 2020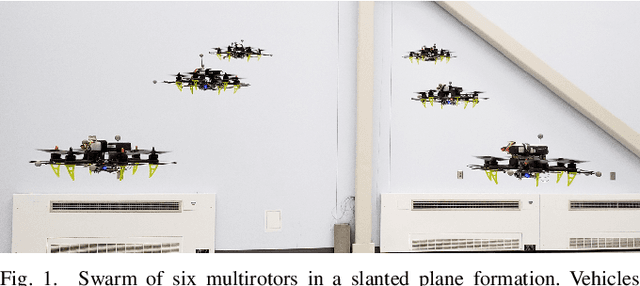
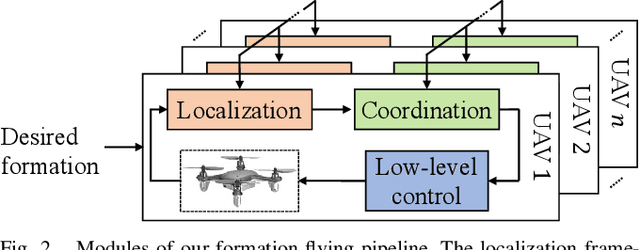

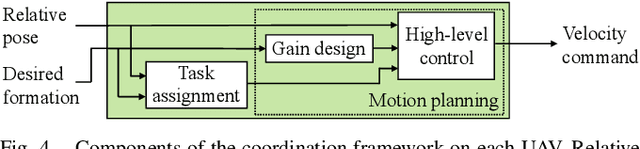
Reliance on external localization infrastructure and centralized coordination are main limiting factors for formation flying of vehicles in large numbers and in unprepared environments. While solutions using onboard localization address the dependency on external infrastructure, the associated coordination strategies typically lack collision avoidance and scalability. To address these shortcomings, we present a unified pipeline with onboard localization and a distributed, collision-free motion planning strategy that scales to a large number of vehicles. Since distributed collision avoidance strategies are known to result in gridlock, we also present a decentralized task assignment solution to deconflict vehicles. We experimentally validate our pipeline in simulation and hardware. The results show that our approach for solving the optimization problem associated with motion planning gives solutions within seconds in cases where general purpose solvers fail due to high complexity. In addition, our lightweight assignment strategy leads to successful and quicker formation convergence in 96-100% of all trials, whereas indefinite gridlocks occur without it for 33-50% of trials. By enabling large-scale, deconflicted coordination, this pipeline should help pave the way for anytime, anywhere deployment of aerial swarms.
CLEAR: A Consistent Lifting, Embedding, and Alignment Rectification Algorithm for Multi-Agent Data Association
Feb 06, 2019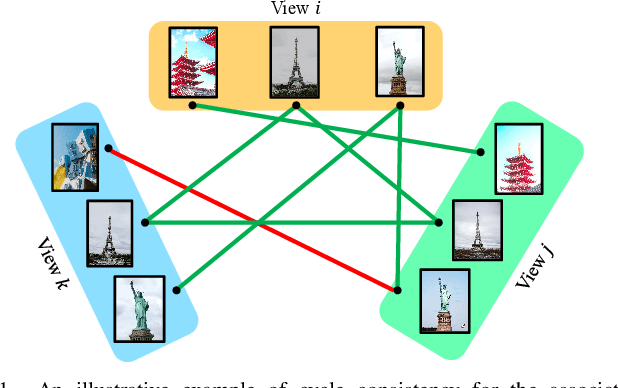
A fundamental challenge in many robotics applications is to correctly synchronize and fuse observations across a team of sensors or agents. Instead of solely relying on pairwise matches among observations, multi-way matching methods leverage the notion of cycle consistency to (i) provide a natural correction mechanism for removing noise and outliers from pairwise matches; (ii) construct an efficient and low-rank representation of the data via merging the redundant observations. To solve this computationally challenging problem, state-of-the-art techniques resort to relaxation and rounding techniques that can potentially result in a solution that violates the cycle consistency principle. Hence, losing the aforementioned benefits. In this work, we present the CLEAR algorithm to address this issue by generating solutions that are, by construction, cycle consistent. Through a novel spectral graph clustering approach, CLEAR fuses the techniques in the multi-way matching and the spectral clustering literature and provides consistent solutions, even in challenging high-noise regimes. Our resulting general framework can provide significant improvement in the accuracy and efficiency of existing distributed multi-agent learning, collaborative SLAM, and multiobject tracking pipelines, which traditionally use pairwise (but potentially inconsistent) correspondences.
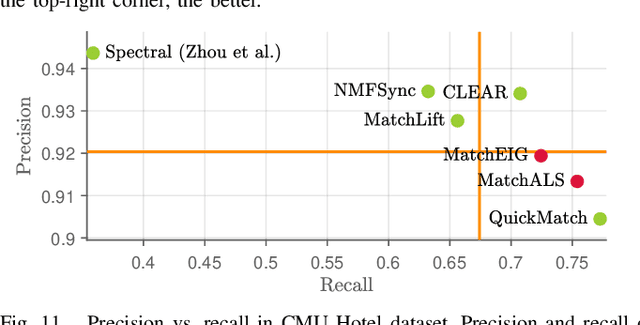
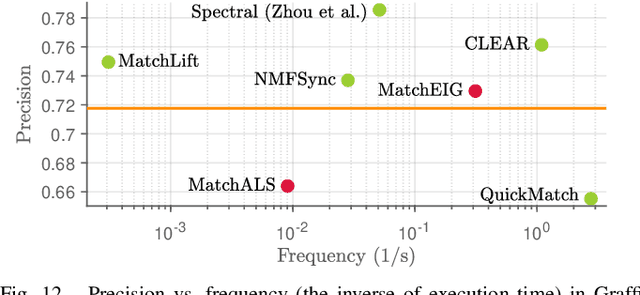
Vision-Based Distributed Formation Control of Unmanned Aerial Vehicles
Sep 01, 2018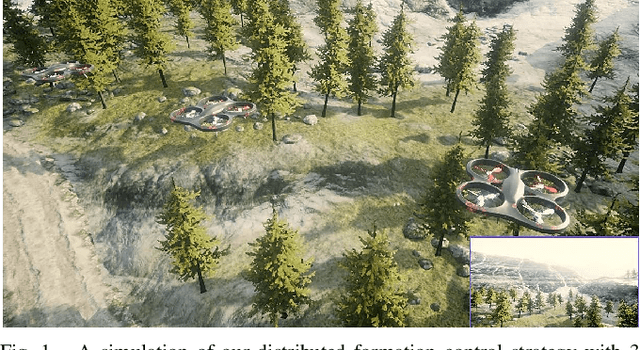
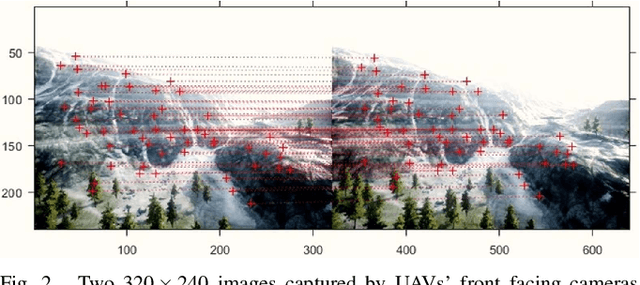
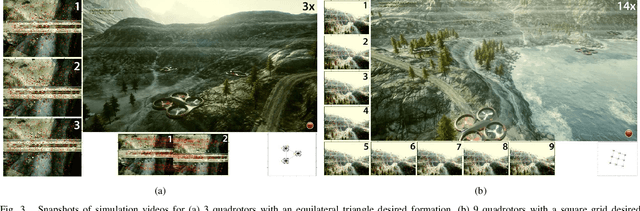
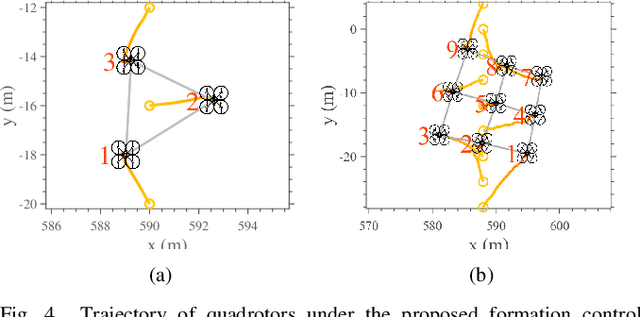
We present a novel control strategy for a team of unmanned aerial vehicles (UAVs) to autonomously achieve a desired formation using only visual feedback provided by the UAV's onboard cameras. This effectively eliminates the need for global position measurements. The proposed pipeline is fully distributed and encompasses a collision avoidance scheme. In our approach, each UAV extracts feature points from captured images and communicates their pixel coordinates and descriptors among its neighbors. These feature points are used in our novel pose estimation algorithm, QuEst, to localize the neighboring UAVs. Compared to existing methods, QuEst has better estimation accuracy and is robust to feature point degeneracies. We demonstrate the proposed pipeline in a high-fidelity simulation environment and show that UAVs can achieve a desired formation in a natural environment without any fiducial markers.
Robust 3D Distributed Formation Control with Application to Quadrotors
Sep 01, 2018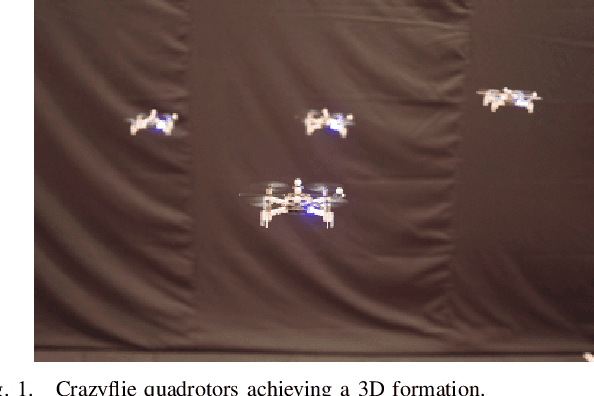
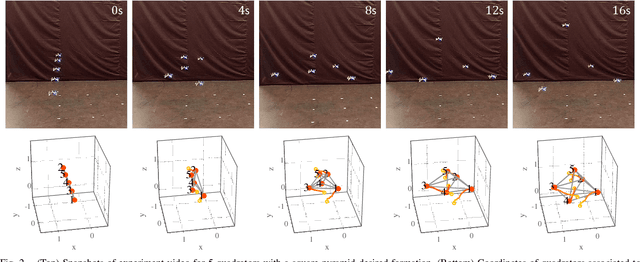
We present a distributed control strategy for a team of quadrotors to autonomously achieve a desired 3D formation. Our approach is based on local relative position measurements and does not require global position information or inter-vehicle communication. We assume that quadrotors have a common sense of direction, which is chosen as the direction of gravitational force measured by their onboard IMU sensors. However, this assumption is not crucial, and our approach is robust to inaccuracies and effects of acceleration on gravitational measurements. In particular, converge to the desired formation is unaffected if each quadrotor has a velocity vector that projects positively onto the desired velocity vector provided by the formation control strategy. We demonstrate the validity of proposed approach in an experimental setup and show that a team of quadrotors achieve a desired 3D formation.