 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePRIMER: Perception-Aware Robust Learning-based Multiagent Trajectory Planner
Jun 14, 2024



In decentralized multiagent trajectory planners, agents need to communicate and exchange their positions to generate collision-free trajectories. However, due to localization errors/uncertainties, trajectory deconfliction can fail even if trajectories are perfectly shared between agents. To address this issue, we first present PARM and PARM*, perception-aware, decentralized, asynchronous multiagent trajectory planners that enable a team of agents to navigate uncertain environments while deconflicting trajectories and avoiding obstacles using perception information. PARM* differs from PARM as it is less conservative, using more computation to find closer-to-optimal solutions. While these methods achieve state-of-the-art performance, they suffer from high computational costs as they need to solve large optimization problems onboard, making it difficult for agents to replan at high rates. To overcome this challenge, we present our second key contribution, PRIMER, a learning-based planner trained with imitation learning (IL) using PARM* as the expert demonstrator. PRIMER leverages the low computational requirements at deployment of neural networks and achieves a computation speed up to 5500 times faster than optimization-based approaches.
MOTLEE: Collaborative Multi-Object Tracking Using Temporal Consistency for Neighboring Robot Frame Alignment
May 08, 2024



Knowing the locations of nearby moving objects is important for a mobile robot to operate safely in a dynamic environment. Dynamic object tracking performance can be improved if robots share observations of tracked objects with nearby team members in real-time. To share observations, a robot must make up-to-date estimates of the transformation from its coordinate frame to the frame of each neighbor, which can be challenging because of odometry drift. We present Multiple Object Tracking with Localization Error Elimination (MOTLEE), a complete system for a multi-robot team to accurately estimate frame transformations and collaboratively track dynamic objects. To accomplish this, robots use open-set image-segmentation methods to build object maps of their environment and then use our Temporally Consistent Alignment of Frames Filter (TCAFF) to align maps and estimate coordinate frame transformations without any initial knowledge of neighboring robot poses. We show that our method for aligning frames enables a team of four robots to collaboratively track six pedestrians with accuracy similar to that of a system with ground truth localization in a challenging hardware demonstration. The code and hardware dataset are available at https://github.com/mit-acl/motlee.
CLIPPER: Robust Data Association without an Initial Guess
Feb 11, 2024



Identifying correspondences in noisy data is a critically important step in estimation processes. When an informative initial estimation guess is available, the data association challenge is less acute; however, the existence of a high-quality initial guess is rare in most contexts. We explore graph-theoretic formulations for data association, which do not require an initial estimation guess. Existing graph-theoretic approaches optimize over unweighted graphs, discarding important consistency information encoded in weighted edges, and frequently attempt to solve NP-hard problems exactly. In contrast, we formulate a new optimization problem that fully leverages weighted graphs and seeks the densest edge-weighted clique. We introduce two relaxations to this problem: a convex semidefinite relaxation which we find to be empirically tight, and a fast first-order algorithm called CLIPPER which frequently arrives at nearly-optimal solutions in milliseconds. When evaluated on point cloud registration problems, our algorithms remain robust up to at least 95% outliers while existing algorithms begin breaking down at 80% outliers. Code is available at https://mit-acl.github.io/clipper.
MOTLEE: Distributed Mobile Multi-Object Tracking with Localization Error Elimination
Apr 24, 2023



We present MOTLEE, a distributed mobile multi-object tracking algorithm that enables a team of robots to collaboratively track moving objects in the presence of localization error. Existing approaches to distributed tracking assume either a static sensor network or that perfect localization is available. Instead, we develop algorithms based on the Kalman-Consensus filter for distributed tracking that are uncertainty-aware and properly leverage localization uncertainty. Our method maintains an accurate understanding of dynamic objects in an environment by realigning robot frames and incorporating uncertainty of frame misalignment into our object tracking formulation. We evaluate our method in hardware on a team of three mobile ground robots tracking four people. Compared to previous works that do not account for localization error, we show that MOTLEE is resilient to localization uncertainties.
Robust MADER: Decentralized Multiagent Trajectory Planner Robust to Communication Delay in Dynamic Environments
Mar 10, 2023



Communication delays can be catastrophic for multiagent systems. However, most existing state-of-the-art multiagent trajectory planners assume perfect communication and therefore lack a strategy to rectify this issue in real-world environments. To address this challenge, we propose Robust MADER (RMADER), a decentralized, asynchronous multiagent trajectory planner robust to communication delay. By always keeping a guaranteed collision-free trajectory and performing a delay check step, RMADER is able to guarantee safety even under communication delay. We perform an in-depth analysis of trajectory deconfliction among agents, extensive benchmark studies, and hardware flight experiments with multiple dynamic obstacles. We show that RMADER outperforms existing approaches by achieving a 100% success rate of collision-free trajectory generation, whereas the next best asynchronous decentralized method only achieves 83% success.
Global Localization in Unstructured Environments using Semantic Object Maps Built from Various Viewpoints
Mar 08, 2023



We present a novel framework for global localization and guided relocalization of a vehicle in an unstructured environment. Compared to existing methods, our pipeline does not rely on cues from urban fixtures (e.g., lane markings, buildings), nor does it make assumptions that require the vehicle to be navigating on a road network. Instead, we achieve localization in both urban and non-urban environments by robustly associating and registering the vehicle's local semantic object map with a compact semantic reference map, potentially built from other viewpoints, time periods, and/or modalities. Robustness to noise, outliers, and missing objects is achieved through our graph-based data association algorithm. Further, the guided relocalization capability of our pipeline mitigates drift inherent in odometry-based localization after the initial global localization. We evaluate our pipeline on two publicly-available, real-world datasets to demonstrate its effectiveness at global localization in both non-urban and urban environments. The Katwijk Beach Planetary Rover dataset is used to show our pipeline's ability to perform accurate global localization in unstructured environments. Demonstrations on the KITTI dataset achieve an average pose error of 3.8m across all 35 localization events on Sequence 00 when localizing in a reference map created from aerial images. Compared to existing works, our pipeline is more general because it can perform global localization in unstructured environments using maps built from different viewpoints.
GraffMatch: Global Matching of 3D Lines and Planes for Wide Baseline LiDAR Registration
Dec 24, 2022



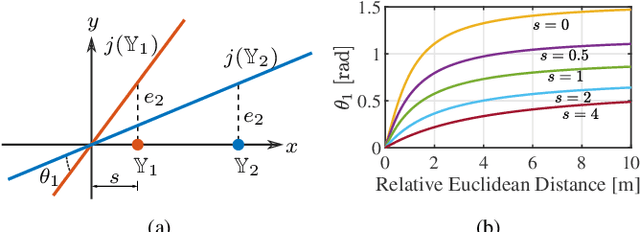
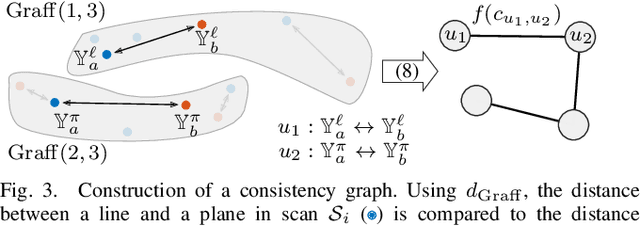
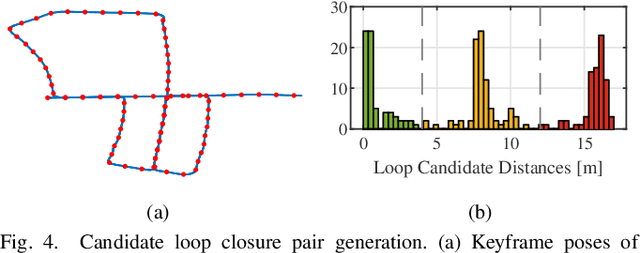
Using geometric landmarks like lines and planes can increase navigation accuracy and decrease map storage requirements compared to commonly-used LiDAR point cloud maps. However, landmark-based registration for applications like loop closure detection is challenging because a reliable initial guess is not available. Global landmark matching has been investigated in the literature, but these methods typically use ad hoc representations of 3D line and plane landmarks that are not invariant to large viewpoint changes, resulting in incorrect matches and high registration error. To address this issue, we adopt the affine Grassmannian manifold to represent 3D lines and planes and prove that the distance between two landmarks is invariant to rotation and translation if a shift operation is performed before applying the Grassmannian metric. This invariance property enables the use of our graph-based data association framework for identifying landmark matches that can subsequently be used for registration in the least-squares sense. Evaluated on a challenging landmark matching and registration task using publicly-available LiDAR datasets, our approach yields a 1.7x and 3.5x improvement in successful registrations compared to methods that use viewpoint-dependent centroid and "closest point" representations, respectively.
* accepted to RA-L; 8 pages. arXiv admin note: text overlap with arXiv:2205.08556
MIXER: Multiattribute, Multiway Fusion of Uncertain Pairwise Affinities
Oct 15, 2022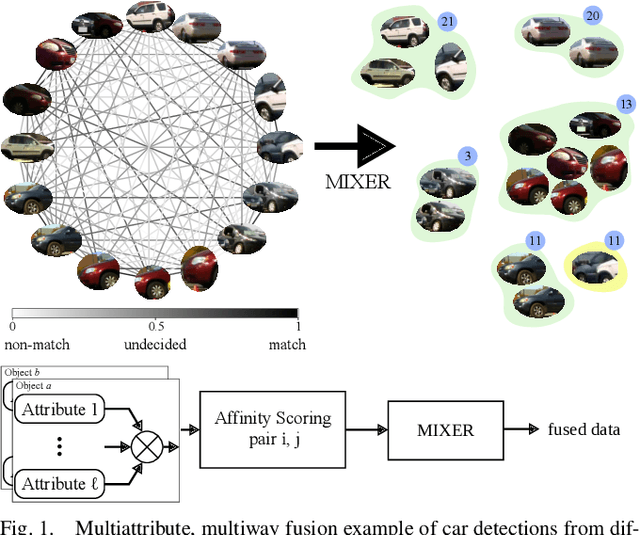
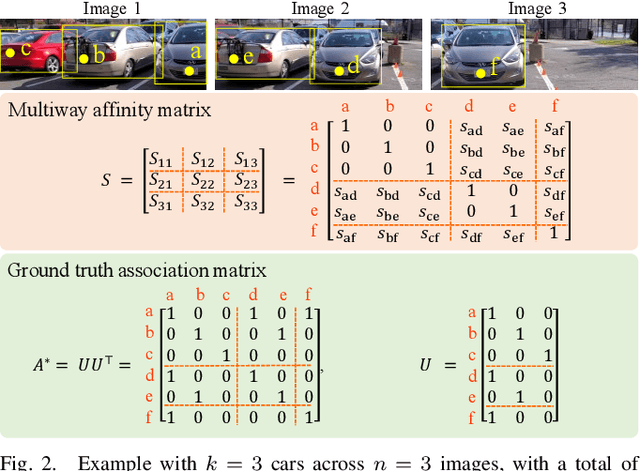
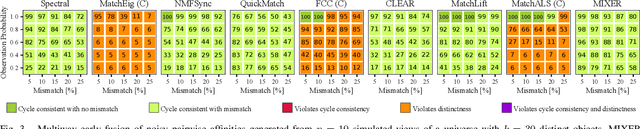
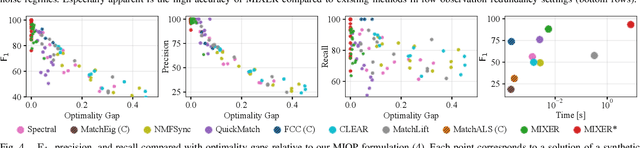
We present a multiway fusion algorithm capable of directly processing uncertain pairwise affinities. In contrast to existing works that require initial pairwise associations, our MIXER algorithm improves accuracy by leveraging the additional information provided by pairwise affinities. Our main contribution is a multiway fusion formulation that is particularly suited to processing non-binary affinities and a novel continuous relaxation whose solutions are guaranteed to be binary, thus avoiding the typical, but potentially problematic, solution binarization steps that may cause infeasibility. A crucial insight of our formulation is that it allows for three modes of association, ranging from non-match, undecided, and match. Exploiting this insight allows fusion to be delayed for some data pairs until more information is available, which is an effective feature for fusion of data with multiple attributes/information sources. We evaluate MIXER on typical synthetic data and benchmark datasets and show increased accuracy against the state of the art in multiway matching, especially in noisy regimes with low observation redundancy. Additionally, we collect RGB data of cars in a parking lot to demonstrate MIXER's ability to fuse data having multiple attributes (color, visual appearance, and bounding box). On this challenging dataset, MIXER achieves 74% F1 accuracy and is 49x faster than the next best algorithm, which has 42% accuracy.
Robust MADER: Decentralized and Asynchronous Multiagent Trajectory Planner Robust to Communication Delay
Oct 06, 2022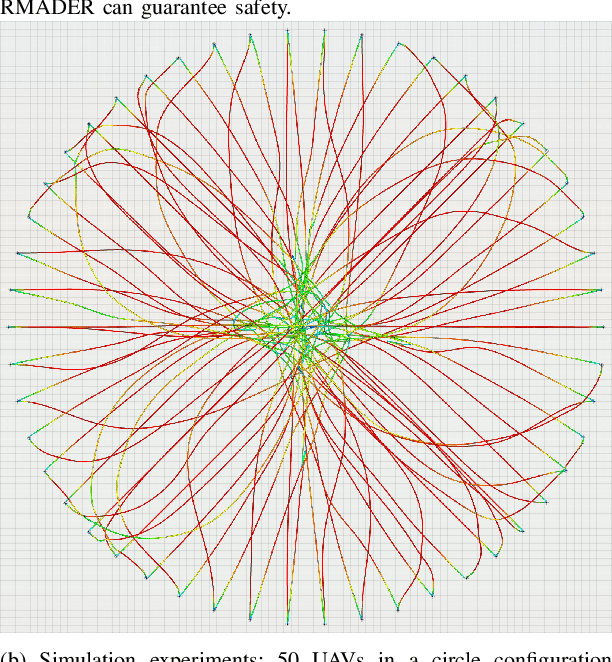
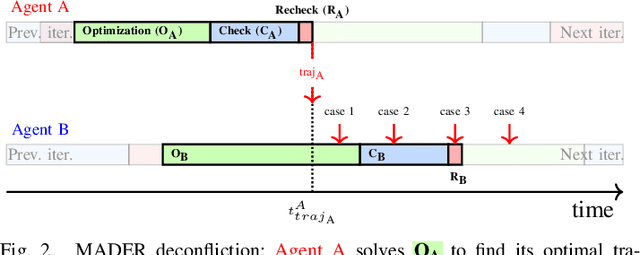
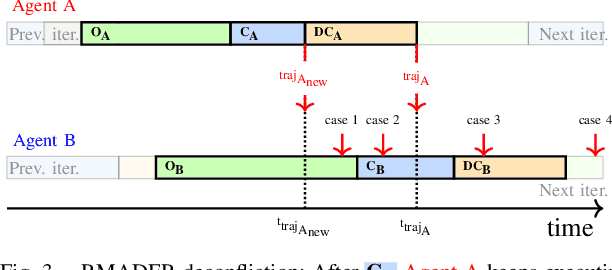
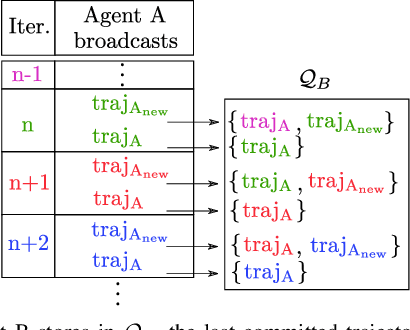
Although communication delays can disrupt multiagent systems, most of the existing multiagent trajectory planners lack a strategy to address this issue. State-of-the-art approaches typically assume perfect communication environments, which is hardly realistic in real-world experiments. This paper presents Robust MADER (RMADER), a decentralized and asynchronous multiagent trajectory planner that can handle communication delays among agents. By broadcasting both the newly optimized trajectory and the committed trajectory, and by performing a delay check step, RMADER is able to guarantee safety even under communication delay. RMADER was validated through extensive simulation and hardware flight experiments and achieved a 100% success rate of collision-free trajectory generation, outperforming state-of-the-art approaches.
Global Data Association for SLAM with 3D Grassmannian Manifold Objects
May 17, 2022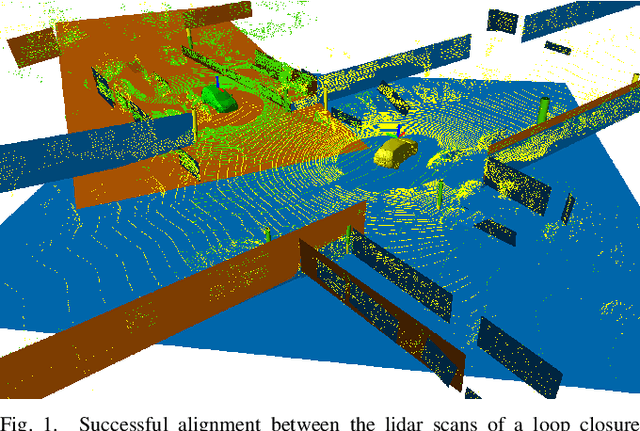
Using pole and plane objects in lidar SLAM can increase accuracy and decrease map storage requirements compared to commonly-used point cloud maps. However, place recognition and geometric verification using these landmarks is challenging due to the requirement for global matching without an initial guess. Existing works typically only leverage either pole or plane landmarks, limiting application to a restricted set of environments. We present a global data association method for loop closure in lidar scans using 3D line and plane objects simultaneously and in a unified manner. The main novelty of this paper is in the representation of line and plane objects extracted from lidar scans on the manifold of affine subspaces, known as the affine Grassmannian. Line and plane correspondences are matched using our graph-based data association framework and subsequently registered in the least-squares sense. Compared to pole-only approaches and plane-only approaches, our 3D affine Grassmannian method yields a 71% and 325% increase respectively to loop closure recall at 100% precision on the KITTI dataset and can provide frame alignment with less than 10 cm and 1 deg of error.