 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeART: Adaptive Relational Transformer for Pedestrian Trajectory Prediction with Temporal-Aware Relations
Apr 04, 2026Accurate prediction of real-world pedestrian trajectories is crucial for a wide range of robot-related applications. Recent approaches typically adopt graph-based or transformer-based frameworks to model interactions. Despite their effectiveness, these methods either introduce unnecessary computational overhead or struggle to represent the diverse and time-varying characteristics of human interactions. In this work, we present an Adaptive Relational Transformer (ART), which introduces a Temporal-Aware Relation Graph (TARG) to explicitly capture the evolution of pairwise interactions and an Adaptive Interaction Pruning (AIP) mechanism to reduce redundant computations efficiently. Extensive evaluations on ETH/UCY and NBA benchmarks show that ART delivers state-of-the-art accuracy with high computational efficiency.
ASLoRA: Adaptive Sharing Low-Rank Adaptation Across Layers
Dec 13, 2024



As large language models (LLMs) grow in size, traditional full fine-tuning becomes increasingly impractical due to its high computational and storage costs. Although popular parameter-efficient fine-tuning methods, such as LoRA, have significantly reduced the number of tunable parameters, there is still room for further optimization. In this work, we propose ASLoRA, a cross-layer parameter-sharing strategy combining global sharing with partial adaptive sharing. Specifically, we share the low-rank matrix A across all layers and adaptively merge matrix B during training. This sharing mechanism not only mitigates overfitting effectively but also captures inter-layer dependencies, significantly enhancing the model's representational capability. We conduct extensive experiments on various NLP tasks, showing that ASLoRA outperforms LoRA while using less than 25% of the parameters, highlighting its flexibility and superior parameter efficiency. Furthermore, in-depth analyses of the adaptive sharing strategy confirm its significant advantages in enhancing both model flexibility and task adaptability.
Omnipotent Virtual Giant for Remote Human-Swarm Interaction
Apr 01, 2019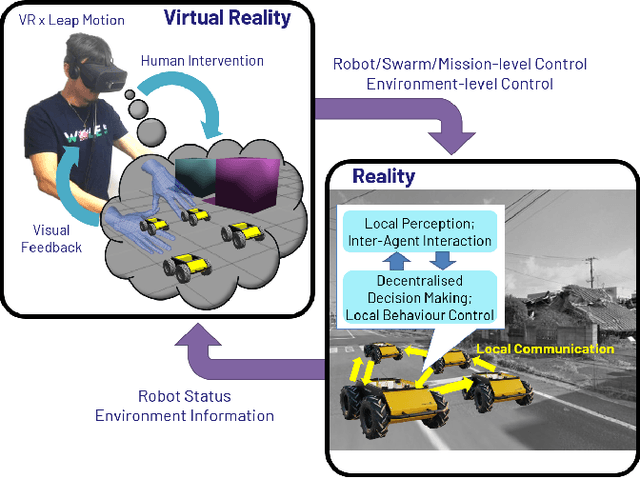
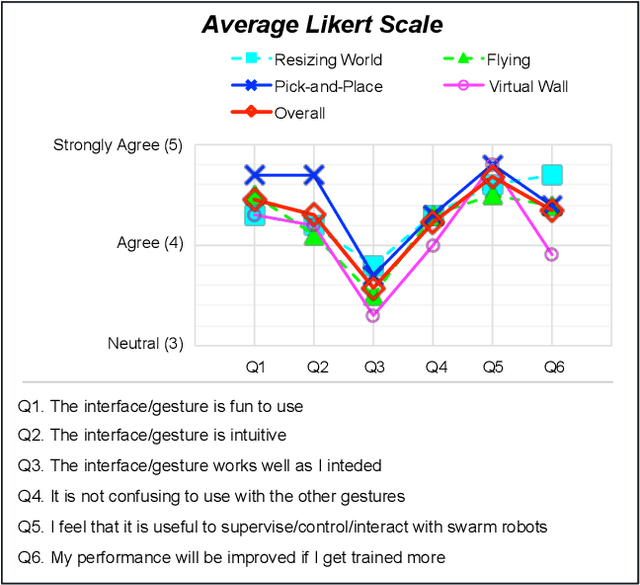
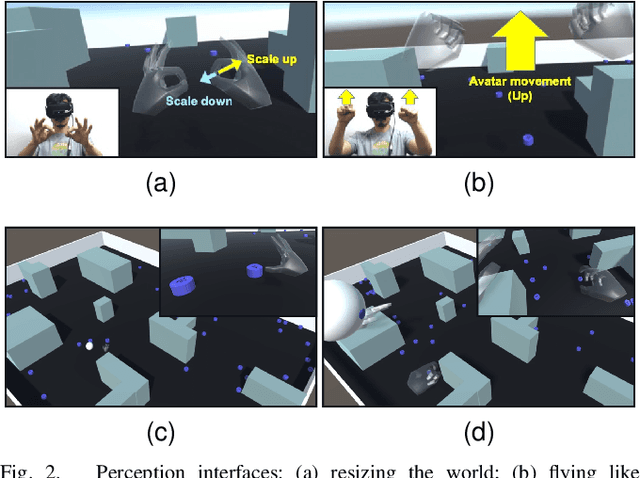
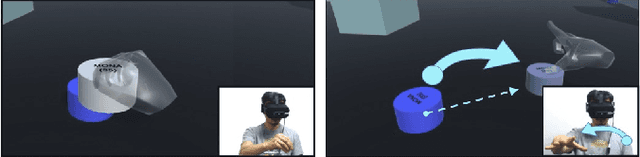
This paper proposes an intuitive human-swarm interaction framework inspired by our childhood memory in which we interacted with living ants by changing their positions and environments as if we were omnipotent relative to the ants. In virtual reality, analogously, we can be a super-powered virtual giant who can supervise a swarm of mobile robots in a vast and remote environment by flying over or resizing the world and coordinate them by picking and placing a robot or creating virtual walls. This work implements this idea by using Virtual Reality along with Leap Motion, which is then validated by proof-of-concept experiments using real and virtual mobile robots in mixed reality. We conduct a usability analysis to quantify the effectiveness of the overall system as well as the individual interfaces proposed in this work. The results revealed that the proposed method is intuitive and feasible for interaction with swarm robots, but may require appropriate training for the new end-user interface device.