 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSPACE: A Python-based Simulator for Evaluating Decentralized Multi-Robot Task Allocation Algorithms
Sep 06, 2024Swarm robotics explores the coordination of multiple robots to achieve collective goals, with collective decision-making being a central focus. This process involves decentralized robots autonomously making local decisions and communicating them, which influences the overall emergent behavior. Testing such decentralized algorithms in real-world scenarios with hundreds or more robots is often impractical, underscoring the need for effective simulation tools. We propose SPACE (Swarm Planning and Control Evaluation), a Python-based simulator designed to support the research, evaluation, and comparison of decentralized Multi-Robot Task Allocation (MRTA) algorithms. SPACE streamlines core algorithmic development by allowing users to implement decision-making algorithms as Python plug-ins, easily construct agent behavior trees via an intuitive GUI, and leverage built-in support for inter-agent communication and local task awareness. To demonstrate its practical utility, we implement and evaluate CBBA and GRAPE within the simulator, comparing their performance across different metrics, particularly in scenarios with dynamically introduced tasks. This evaluation shows the usefulness of SPACE in conducting rigorous and standardized comparisons of MRTA algorithms, helping to support future research in the field.
Omnipotent Virtual Giant for Remote Human-Swarm Interaction
Apr 01, 2019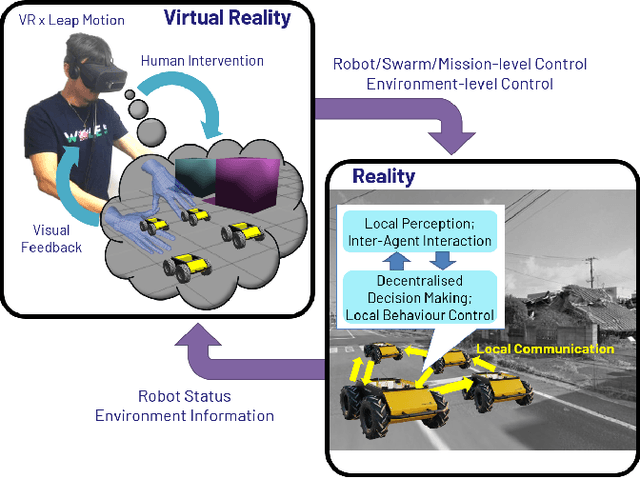
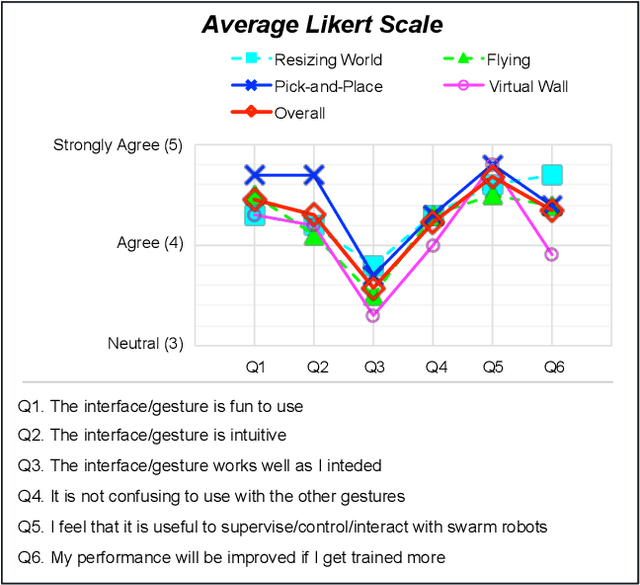
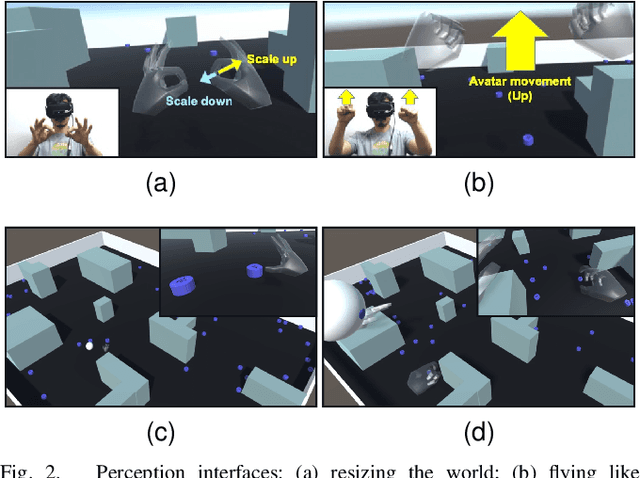
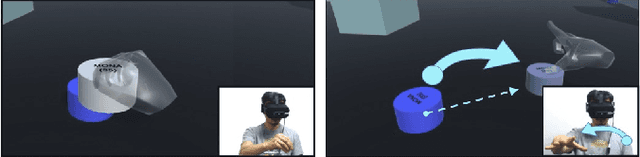
This paper proposes an intuitive human-swarm interaction framework inspired by our childhood memory in which we interacted with living ants by changing their positions and environments as if we were omnipotent relative to the ants. In virtual reality, analogously, we can be a super-powered virtual giant who can supervise a swarm of mobile robots in a vast and remote environment by flying over or resizing the world and coordinate them by picking and placing a robot or creating virtual walls. This work implements this idea by using Virtual Reality along with Leap Motion, which is then validated by proof-of-concept experiments using real and virtual mobile robots in mixed reality. We conduct a usability analysis to quantify the effectiveness of the overall system as well as the individual interfaces proposed in this work. The results revealed that the proposed method is intuitive and feasible for interaction with swarm robots, but may require appropriate training for the new end-user interface device.
Anonymous Hedonic Game for Task Allocation in a Large-Scale Multiple Agent System
Jul 25, 2018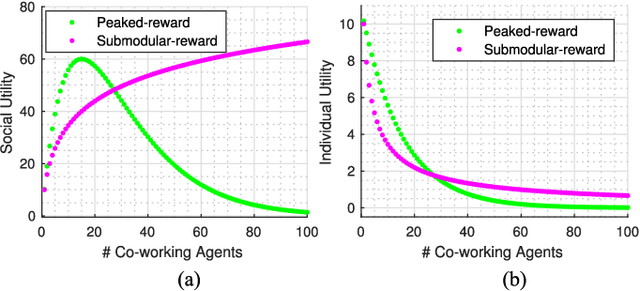

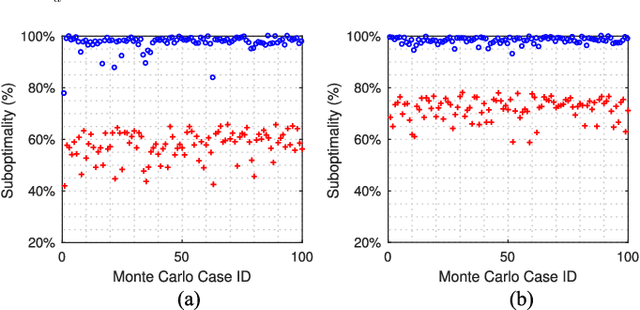

This paper proposes a novel game-theoretical autonomous decision-making framework to address a task allocation problem for a swarm of multiple agents. We consider cooperation of self-interested agents, and show that our proposed decentralized algorithm guarantees convergence of agents with social inhibition to a Nash stable partition (i.e., social agreement) within polynomial time. The algorithm is simple and executable based on local interactions with neighbor agents under a strongly-connected communication network and even in asynchronous environments. We analytically present a mathematical formulation for computing the lower bound of suboptimality of the solution, and additionally show that 50% of suboptimality can be at least guaranteed if social utilities are non-decreasing functions with respect to the number of co-working agents. The results of numerical experiments confirm that the proposed framework is scalable, fast adaptable against dynamical environments, and robust even in a realistic situation.