 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAGRI-Fidelity: Evaluating the Reliability of Listenable Explanations for Poultry Disease Detection
Mar 18, 2026Existing XAI metrics measure faithfulness for a single model, ignoring model multiplicity where near-optimal classifiers rely on different or spurious acoustic cues. In noisy farm environments, stationary artifacts such as ventilation noise can produce explanations that are faithful yet unreliable, as masking-based metrics fail to penalize redundant shortcuts. We propose AGRI-Fidelity, a reliability-oriented evaluation framework for listenable explanations in poultry disease detection without spatial ground truth. The method combines cross-model consensus with cyclic temporal permutation to construct null distributions and compute a False Discovery Rate (FDR), suppressing stationary artifacts while preserving time-localized bioacoustic markers. Across real and controlled datasets, AGRI-Fidelity effectively provides reliability-aware discrimination for all data points versus masking-based metrics.
Continuous Diffusion Transformers for Designing Synthetic Regulatory Elements
Mar 11, 2026We present a parameter-efficient Diffusion Transformer (DiT) for generating 200bp cell-type-specific regulatory DNA sequences. By replacing the U-Net backbone of DNA-Diffusion with a transformer denoiser equipped with a 2D CNN input encoder, our model matches the U-Net's best validation loss in 13 epochs (60$\times$ fewer) and converges 39% lower, while reducing memorization from 5.3% to 1.7% of generated sequences aligning to training data via BLAT. Ablations show the CNN encoder is essential: without it, validation loss increases 70% regardless of positional embedding choice. We further apply DDPO finetuning using Enformer as a reward model, achieving a 38$\times$ improvement in predicted regulatory activity. Cross-validation against DRAKES on an independent prediction task confirms that improvements reflect genuine regulatory signal rather than reward model overfitting.
Infinigen-Sim: Procedural Generation of Articulated Simulation Assets
May 19, 2025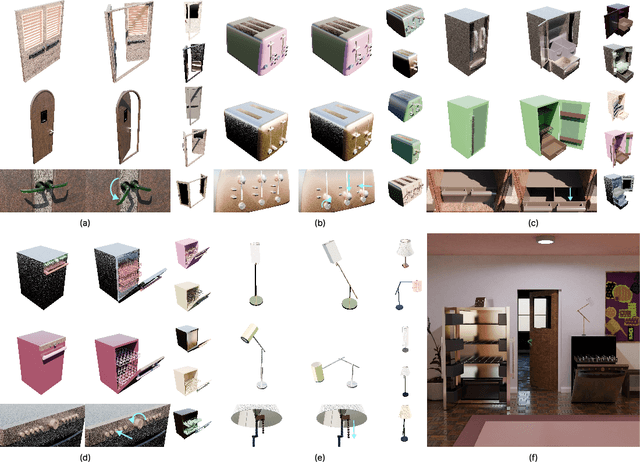
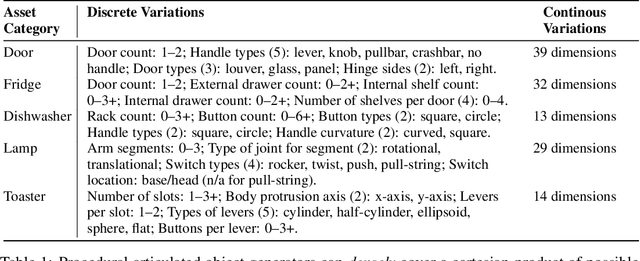
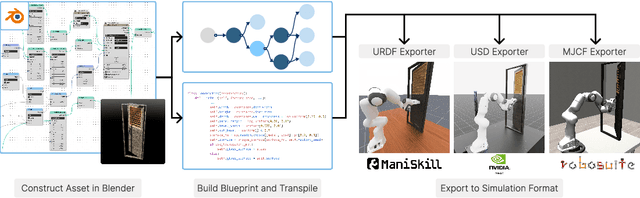
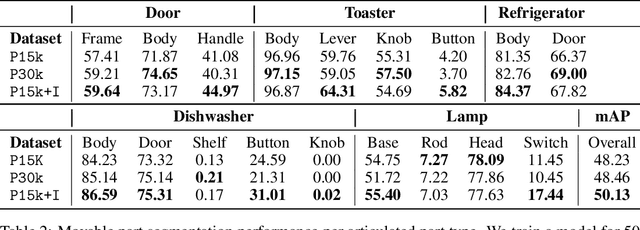
We introduce Infinigen-Sim, a toolkit which enables users to create diverse and realistic articulated object procedural generators. These tools are composed of high-level utilities for use creating articulated assets in Blender, as well as an export pipeline to integrate the resulting assets into common robotics simulators. We demonstrate our system by creating procedural generators for 5 common articulated object categories. Experiments show that assets sampled from these generators are useful for movable object segmentation, training generalizable reinforcement learning policies, and sim-to-real transfer of imitation learning policies.