 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHow to Evaluate Monocular Depth Estimation?
Oct 22, 2025Monocular depth estimation is an important task with rapid progress, but how to evaluate it remains an open question, as evidenced by a lack of standardization in existing literature and a large selection of evaluation metrics whose trade-offs and behaviors are not well understood. This paper contributes a novel, quantitative analysis of existing metrics in terms of their sensitivity to various types of perturbations of ground truth, emphasizing comparison to human judgment. Our analysis reveals that existing metrics are severely under-sensitive to curvature perturbation such as making flat surfaces wavy. To remedy this, we introduce a new metric based on relative surface normals, along with new depth visualization tools and a principled method to create composite metrics with better human alignment. Code and data are available at: https://github.com/princeton-vl/evalmde.
Evaluating Robustness of Monocular Depth Estimation with Procedural Scene Perturbations
Jul 01, 2025Recent years have witnessed substantial progress on monocular depth estimation, particularly as measured by the success of large models on standard benchmarks. However, performance on standard benchmarks does not offer a complete assessment, because most evaluate accuracy but not robustness. In this work, we introduce PDE (Procedural Depth Evaluation), a new benchmark which enables systematic robustness evaluation. PDE uses procedural generation to create 3D scenes that test robustness to various controlled perturbations, including object, camera, material and lighting changes. Our analysis yields interesting findings on what perturbations are challenging for state-of-the-art depth models, which we hope will inform further research. Code and data are available at https://github.com/princeton-vl/proc-depth-eval.
Infinigen-Sim: Procedural Generation of Articulated Simulation Assets
May 19, 2025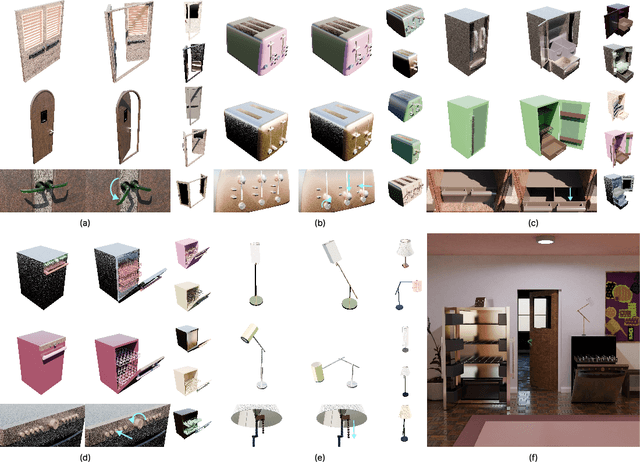
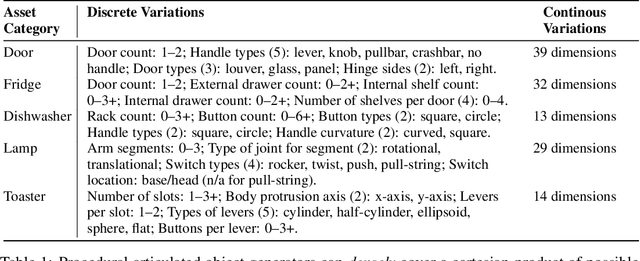
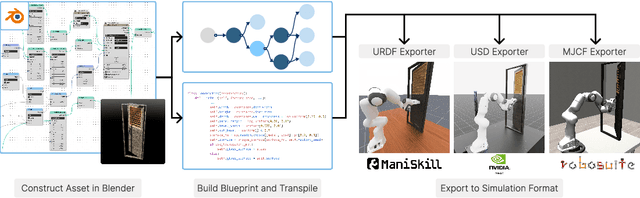
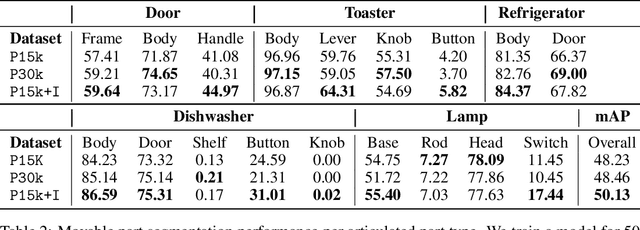
We introduce Infinigen-Sim, a toolkit which enables users to create diverse and realistic articulated object procedural generators. These tools are composed of high-level utilities for use creating articulated assets in Blender, as well as an export pipeline to integrate the resulting assets into common robotics simulators. We demonstrate our system by creating procedural generators for 5 common articulated object categories. Experiments show that assets sampled from these generators are useful for movable object segmentation, training generalizable reinforcement learning policies, and sim-to-real transfer of imitation learning policies.