 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdvReal: Adversarial Patch Generation Framework with Application to Adversarial Safety Evaluation of Object Detection Systems
May 22, 2025



Autonomous vehicles are typical complex intelligent systems with artificial intelligence at their core. However, perception methods based on deep learning are extremely vulnerable to adversarial samples, resulting in safety accidents. How to generate effective adversarial examples in the physical world and evaluate object detection systems is a huge challenge. In this study, we propose a unified joint adversarial training framework for both 2D and 3D samples to address the challenges of intra-class diversity and environmental variations in real-world scenarios. Building upon this framework, we introduce an adversarial sample reality enhancement approach that incorporates non-rigid surface modeling and a realistic 3D matching mechanism. We compare with 5 advanced adversarial patches and evaluate their attack performance on 8 object detecotrs, including single-stage, two-stage, and transformer-based models. Extensive experiment results in digital and physical environments demonstrate that the adversarial textures generated by our method can effectively mislead the target detection model. Moreover, proposed method demonstrates excellent robustness and transferability under multi-angle attacks, varying lighting conditions, and different distance in the physical world. The demo video and code can be obtained at https://github.com/Huangyh98/AdvReal.git.
PPGNet: Learning Point-Pair Graph for Line Segment Detection
May 16, 2019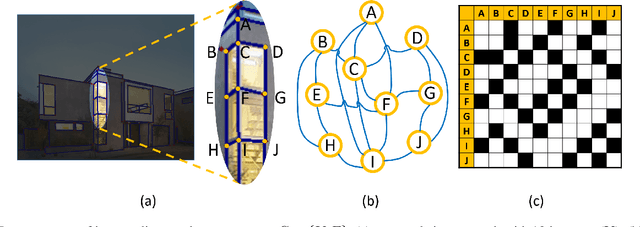

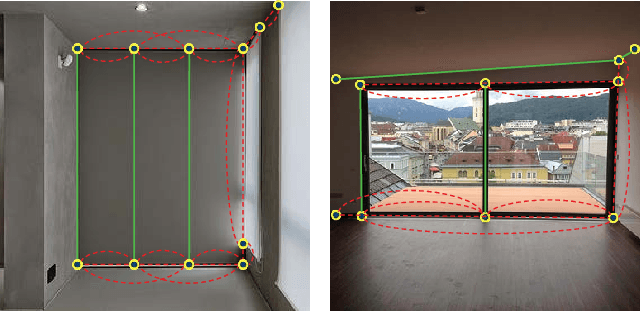
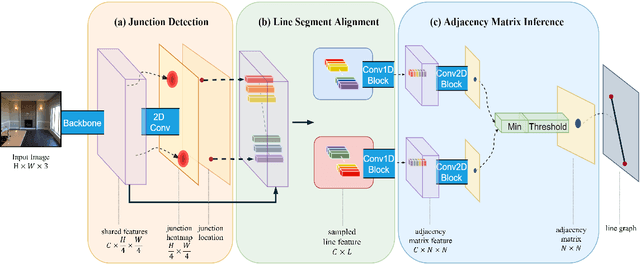
In this paper, we present a novel framework to detect line segments in man-made environments. Specifically, we propose to describe junctions, line segments and relationships between them with a simple graph, which is more structured and informative than end-point representation used in existing line segment detection methods. In order to extract a line segment graph from an image, we further introduce the PPGNet, a convolutional neural network that directly infers a graph from an image. We evaluate our method on published benchmarks including York Urban and Wireframe datasets. The results demonstrate that our method achieves satisfactory performance and generalizes well on all the benchmarks. The source code of our work is available at \url{https://github.com/svip-lab/PPGNet}.