 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVGenST-Bench: A Benchmark for Spatio-Temporal Reasoning via Active Video Synthesis
May 21, 2026Spatio-temporal reasoning is a core capability for Multimodal Large Language Models (MLLMs) operating in the real world. As such, evaluating it precisely has become an essential challenge. However, existing spatio-temporal reasoning benchmark datasets primarily rely on static image sets or passively curated video data, which limits the evaluation of fine-grained reasoning capabilities. In this paper, we introduce VGenST-Bench, a video benchmark that employs generative models to actively synthesize highly controlled and diverse evaluation scenarios. To construct VGenST-Bench, we propose a multi-agent pipeline incorporating a human quality control stage, ensuring the quality of all generated videos and QA pairs. We establish a comprehensive 3x2x2 video taxonomy, encompassing Spatial Scale, Perspective, and Scene Dynamics to span diverse scenarios. Furthermore, we design a hierarchical task suite that decouples low-level visual perception from high-level spatio-temporal reasoning. By shifting the paradigm from passive curation to active synthesis, VGenST-Bench enables fine-grained diagnosis of spatio-temporal understanding in MLLMs.
EXAONE 4.5 Technical Report
Apr 09, 2026This technical report introduces EXAONE 4.5, the first open-weight vision language model released by LG AI Research. EXAONE 4.5 is architected by integrating a dedicated visual encoder into the existing EXAONE 4.0 framework, enabling native multimodal pretraining over both visual and textual modalities. The model is trained on large-scale data with careful curation, particularly emphasizing document-centric corpora that align with LG's strategic application domains. This targeted data design enables substantial performance gains in document understanding and related tasks, while also delivering broad improvements across general language capabilities. EXAONE 4.5 extends context length up to 256K tokens, facilitating long-context reasoning and enterprise-scale use cases. Comparative evaluations demonstrate that EXAONE 4.5 achieves competitive performance in general benchmarks while outperforming state-of-the-art models of similar scale in document understanding and Korean contextual reasoning. As part of LG's ongoing effort toward practical industrial deployment, EXAONE 4.5 is designed to be continuously extended with additional domains and application scenarios to advance AI for a better life.
Group3D: MLLM-Driven Semantic Grouping for Open-Vocabulary 3D Object Detection
Mar 23, 2026Open-vocabulary 3D object detection aims to localize and recognize objects beyond a fixed training taxonomy. In multi-view RGB settings, recent approaches often decouple geometry-based instance construction from semantic labeling, generating class-agnostic fragments and assigning open-vocabulary categories post hoc. While flexible, such decoupling leaves instance construction governed primarily by geometric consistency, without semantic constraints during merging. When geometric evidence is view-dependent and incomplete, this geometry-only merging can lead to irreversible association errors, including over-merging of distinct objects or fragmentation of a single instance. We propose Group3D, a multi-view open-vocabulary 3D detection framework that integrates semantic constraints directly into the instance construction process. Group3D maintains a scene-adaptive vocabulary derived from a multimodal large language model (MLLM) and organizes it into semantic compatibility groups that encode plausible cross-view category equivalence. These groups act as merge-time constraints: 3D fragments are associated only when they satisfy both semantic compatibility and geometric consistency. This semantically gated merging mitigates geometry-driven over-merging while absorbing multi-view category variability. Group3D supports both pose-known and pose-free settings, relying only on RGB observations. Experiments on ScanNet and ARKitScenes demonstrate that Group3D achieves state-of-the-art performance in multi-view open-vocabulary 3D detection, while exhibiting strong generalization in zero-shot scenarios. The project page is available at https://ubin108.github.io/Group3D/.
AdaRadar: Rate Adaptive Spectral Compression for Radar-based Perception
Mar 18, 2026Radar is a critical perception modality in autonomous driving systems due to its all-weather characteristics and ability to measure range and Doppler velocity. However, the sheer volume of high-dimensional raw radar data saturates the communication link to the computing engine (e.g., an NPU), which is often a low-bandwidth interface with data rate provisioned only for a few low-resolution range-Doppler frames. A generalized codec for utilizing high-dimensional radar data is notably absent, while existing image-domain approaches are unsuitable, as they typically operate at fixed compression ratios and fail to adapt to varying or adversarial conditions. In light of this, we propose radar data compression with adaptive feedback. It dynamically adjusts the compression ratio by performing gradient descent from the proxy gradient of detection confidence with respect to the compression rate. We employ a zeroth-order gradient approximation as it enables gradient computation even with non-differentiable core operations--pruning and quantization. This also avoids transmitting the gradient tensors over the band-limited link, which, if estimated, would be as large as the original radar data. In addition, we have found that radar feature maps are heavily concentrated on a few frequency components. Thus, we apply the discrete cosine transform to the radar data cubes and selectively prune out the coefficients effectively. We preserve the dynamic range of each radar patch through scaled quantization. Combining those techniques, our proposed online adaptive compression scheme achieves over 100x feature size reduction at minimal performance drop (~1%p). We validate our results on the RADIal, CARRADA, and Radatron datasets.
K-EXAONE Technical Report
Jan 05, 2026This technical report presents K-EXAONE, a large-scale multilingual language model developed by LG AI Research. K-EXAONE is built on a Mixture-of-Experts architecture with 236B total parameters, activating 23B parameters during inference. It supports a 256K-token context window and covers six languages: Korean, English, Spanish, German, Japanese, and Vietnamese. We evaluate K-EXAONE on a comprehensive benchmark suite spanning reasoning, agentic, general, Korean, and multilingual abilities. Across these evaluations, K-EXAONE demonstrates performance comparable to open-weight models of similar size. K-EXAONE, designed to advance AI for a better life, is positioned as a powerful proprietary AI foundation model for a wide range of industrial and research applications.
The Coverage Principle: A Framework for Understanding Compositional Generalization
May 26, 2025Large language models excel at pattern matching, yet often fall short in systematic compositional generalization. We propose the coverage principle: a data-centric framework showing that models relying primarily on pattern matching for compositional tasks cannot reliably generalize beyond substituting fragments that yield identical results when used in the same contexts. We demonstrate that this framework has a strong predictive power for the generalization capabilities of Transformers. First, we derive and empirically confirm that the training data required for two-hop generalization grows at least quadratically with the token set size, and the training data efficiency does not improve with 20x parameter scaling. Second, for compositional tasks with path ambiguity where one variable affects the output through multiple computational paths, we show that Transformers learn context-dependent state representations that undermine both performance and interoperability. Third, Chain-of-Thought supervision improves training data efficiency for multi-hop tasks but still struggles with path ambiguity. Finally, we outline a \emph{mechanism-based} taxonomy that distinguishes three ways neural networks can generalize: structure-based (bounded by coverage), property-based (leveraging algebraic invariances), and shared-operator (through function reuse). This conceptual lens contextualizes our results and highlights where new architectural ideas are needed to achieve systematic compositionally. Overall, the coverage principle provides a unified lens for understanding compositional reasoning, and underscores the need for fundamental architectural or training innovations to achieve truly systematic compositionality.
The CoT Encyclopedia: Analyzing, Predicting, and Controlling how a Reasoning Model will Think
May 15, 2025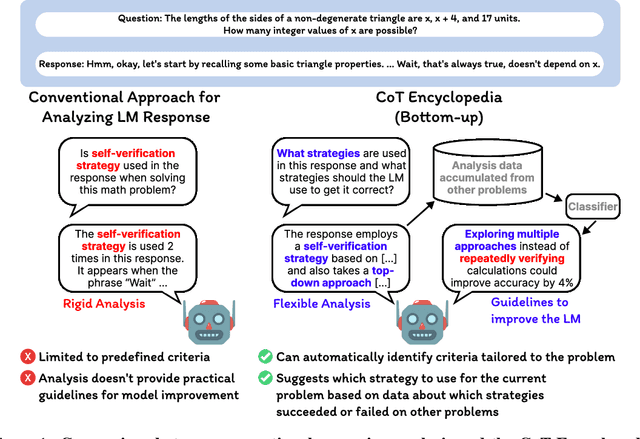
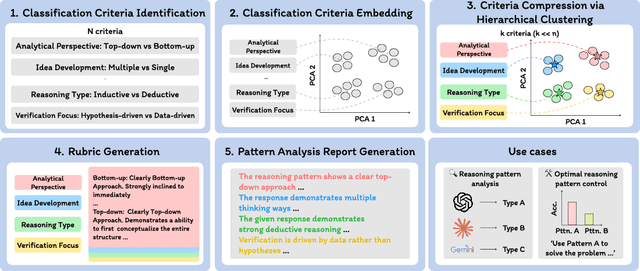

Long chain-of-thought (CoT) is an essential ingredient in effective usage of modern large language models, but our understanding of the reasoning strategies underlying these capabilities remains limited. While some prior works have attempted to categorize CoTs using predefined strategy types, such approaches are constrained by human intuition and fail to capture the full diversity of model behaviors. In this work, we introduce the CoT Encyclopedia, a bottom-up framework for analyzing and steering model reasoning. Our method automatically extracts diverse reasoning criteria from model-generated CoTs, embeds them into a semantic space, clusters them into representative categories, and derives contrastive rubrics to interpret reasoning behavior. Human evaluations show that this framework produces more interpretable and comprehensive analyses than existing methods. Moreover, we demonstrate that this understanding enables performance gains: we can predict which strategy a model is likely to use and guide it toward more effective alternatives. Finally, we provide practical insights, such as that training data format (e.g., free-form vs. multiple-choice) has a far greater impact on reasoning behavior than data domain, underscoring the importance of format-aware model design.
Color Universal Design Neural Network for the Color Vision Deficiencies
Feb 12, 2025Information regarding images should be visually understood by anyone, including those with color deficiency. However, such information is not recognizable if the color that seems to be distorted to the color deficiencies meets an adjacent object. The aim of this paper is to propose a color universal design network, called CUD-Net, that generates images that are visually understandable by individuals with color deficiency. CUD-Net is a convolutional deep neural network that can preserve color and distinguish colors for input images by regressing the node point of a piecewise linear function and using a specific filter for each image. To generate CUD images for color deficiencies, we follow a four-step process. First, we refine the CUD dataset based on specific criteria by color experts. Second, we expand the input image information through pre-processing that is specialized for color deficiency vision. Third, we employ a multi-modality fusion architecture to combine features and process the expanded images. Finally, we propose a conjugate loss function based on the composition of the predicted image through the model to address one-to-many problems that arise from the dataset. Our approach is able to produce high-quality CUD images that maintain color and contrast stability. The code for CUD-Net is available on the GitHub repository
Cognitive Map for Language Models: Optimal Planning via Verbally Representing the World Model
Jun 21, 2024



Language models have demonstrated impressive capabilities across various natural language processing tasks, yet they struggle with planning tasks requiring multi-step simulations. Inspired by human cognitive processes, this paper investigates the optimal planning power of language models that can construct a cognitive map of a given environment. Our experiments demonstrate that cognitive map significantly enhances the performance of both optimal and reachable planning generation ability in the Gridworld path planning task. We observe that our method showcases two key characteristics similar to human cognition: \textbf{generalization of its planning ability to extrapolated environments and rapid adaptation with limited training data.} We hope our findings in the Gridworld task provide insights into modeling human cognitive processes in language models, potentially leading to the development of more advanced and robust systems that better resemble human cognition.
How Do Large Language Models Acquire Factual Knowledge During Pretraining?
Jun 17, 2024



Despite the recent observation that large language models (LLMs) can store substantial factual knowledge, there is a limited understanding of the mechanisms of how they acquire factual knowledge through pretraining. This work addresses this gap by studying how LLMs acquire factual knowledge during pretraining. The findings reveal several important insights into the dynamics of factual knowledge acquisition during pretraining. First, counterintuitively, we observe that pretraining on more data shows no significant improvement in the model's capability to acquire and maintain factual knowledge. Next, there is a power-law relationship between training steps and forgetting of memorization and generalization of factual knowledge, and LLMs trained with duplicated training data exhibit faster forgetting. Third, training LLMs with larger batch sizes can enhance the models' robustness to forgetting. Overall, our observations suggest that factual knowledge acquisition in LLM pretraining occurs by progressively increasing the probability of factual knowledge presented in the pretraining data at each step. However, this increase is diluted by subsequent forgetting. Based on this interpretation, we demonstrate that we can provide plausible explanations for recently observed behaviors of LLMs, such as the poor performance of LLMs on long-tail knowledge and the benefits of deduplicating the pretraining corpus.