 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKiloBot: A Programming Language for Deploying Perception-Guided Industrial Manipulators at Scale
Sep 05, 2024We would like industrial robots to handle unstructured environments with cameras and perception pipelines. In contrast to traditional industrial robots that replay offline-crafted trajectories, online behavior planning is required for these perception-guided industrial applications. Aside from perception and planning algorithms, deploying perception-guided manipulators also requires substantial effort in integration. One approach is writing scripts in a traditional language (such as Python) to construct the planning problem and perform integration with other algorithmic modules & external devices. While scripting in Python is feasible for a handful of robots and applications, deploying perception-guided manipulation at scale (e.g., more than 10000 robot workstations in over 2000 customer sites) becomes intractable. To resolve this challenge, we propose a Domain-Specific Language (DSL) for perception-guided manipulation applications. To scale up the deployment,our DSL provides: 1) an easily accessible interface to construct & solve a sub-class of Task and Motion Planning (TAMP) problems that are important in practical applications; and 2) a mechanism to implement flexible control flow to perform integration and address customized requirements of distinct industrial application. Combined with an intuitive graphical programming frontend, our DSL is mainly used by machine operators without coding experience in traditional programming languages. Within hours of training, operators are capable of orchestrating interesting sophisticated manipulation behaviors with our DSL. Extensive practical deployments demonstrate the efficacy of our method.
Bundle-specific Tractogram Distribution Estimation Using Higher-order Streamline Differential Equation
Jul 06, 2023Tractography traces the peak directions extracted from fiber orientation distribution (FOD) suffering from ambiguous spatial correspondences between diffusion directions and fiber geometry, which is prone to producing erroneous tracks while missing true positive connections. The peaks-based tractography methods 'locally' reconstructed streamlines in 'single to single' manner, thus lacking of global information about the trend of the whole fiber bundle. In this work, we propose a novel tractography method based on a bundle-specific tractogram distribution function by using a higher-order streamline differential equation, which reconstructs the streamline bundles in 'cluster to cluster' manner. A unified framework for any higher-order streamline differential equation is presented to describe the fiber bundles with disjoint streamlines defined based on the diffusion tensor vector field. At the global level, the tractography process is simplified as the estimation of bundle-specific tractogram distribution (BTD) coefficients by minimizing the energy optimization model, and is used to characterize the relations between BTD and diffusion tensor vector under the prior guidance by introducing the tractogram bundle information to provide anatomic priors. Experiments are performed on simulated Hough, Sine, Circle data, ISMRM 2015 Tractography Challenge data, FiberCup data, and in vivo data from the Human Connectome Project (HCP) data for qualitative and quantitative evaluation. The results demonstrate that our approach can reconstruct the complex global fiber bundles directly. BTD reduces the error deviation and accumulation at the local level and shows better results in reconstructing long-range, twisting, and large fanning tracts.
Grasping with Chopsticks: Combating Covariate Shift in Model-free Imitation Learning for Fine Manipulation
Nov 13, 2020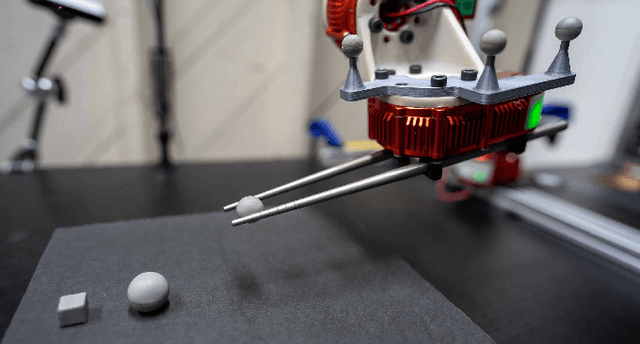
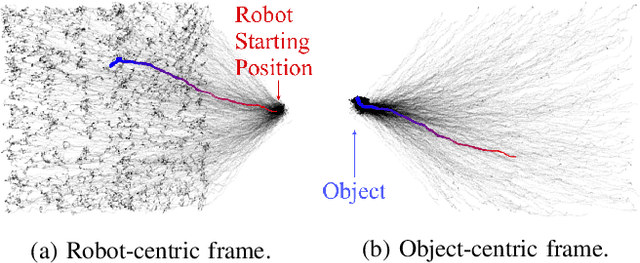
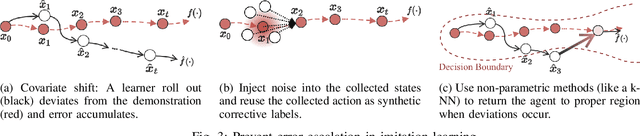
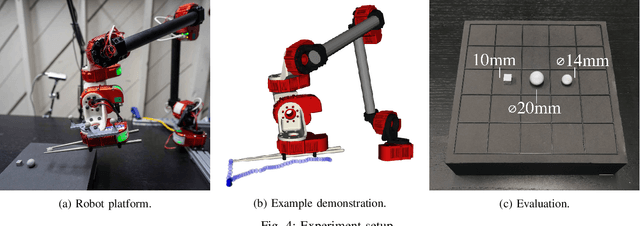
Billions of people use chopsticks, a simple yet versatile tool, for fine manipulation of everyday objects. The small, curved, and slippery tips of chopsticks pose a challenge for picking up small objects, making them a suitably complex test case. This paper leverages human demonstrations to develop an autonomous chopsticks-equipped robotic manipulator. Due to the lack of accurate models for fine manipulation, we explore model-free imitation learning, which traditionally suffers from the covariate shift phenomenon that causes poor generalization. We propose two approaches to reduce covariate shift, neither of which requires access to an interactive expert or a model, unlike previous approaches. First, we alleviate single-step prediction errors by applying an invariant operator to increase the data support at critical steps for grasping. Second, we generate synthetic corrective labels by adding bounded noise and combining parametric and non-parametric methods to prevent error accumulation. We demonstrate our methods on a real chopstick-equipped robot that we built, and observe the agent's success rate increase from 37.3% to 80%, which is comparable to the human expert performance of 82.6%.
Telemanipulation with Chopsticks: Analyzing Human Factors in User Demonstrations
Jul 31, 2020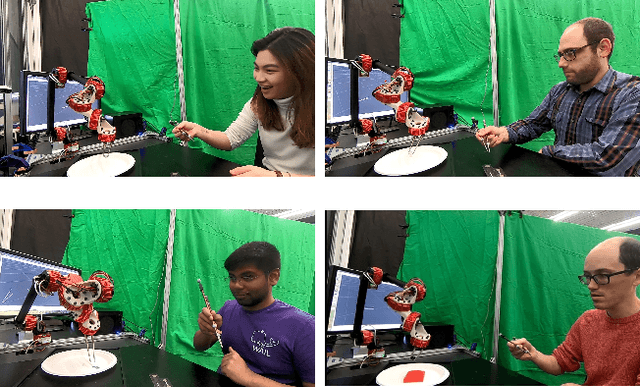


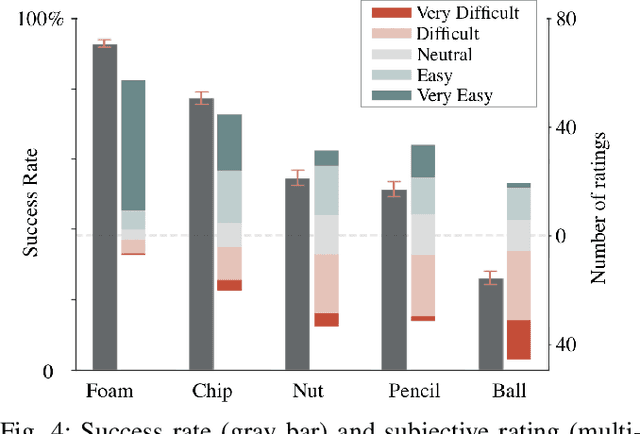
Chopsticks constitute a simple yet versatile tool that humans have used for thousands of years to perform a variety of challenging tasks ranging from food manipulation to surgery. Applying such a simple tool in a diverse repertoire of scenarios requires significant adaptability. Towards developing autonomous manipulators with comparable adaptability to humans, we study chopsticks-based manipulation to gain insights into human manipulation strategies. We conduct a within-subjects user study with 25 participants, evaluating three different data-collection methods: normal chopsticks, motion-captured chopsticks, and a novel chopstick telemanipulation interface. We analyze factors governing human performance across a variety of challenging chopstick-based grasping tasks. Although participants rated teleoperation as the least comfortable and most difficult-to-use method, teleoperation enabled users to achieve the highest success rates on three out of five objects considered. Further, we notice that subjects quickly learned and adapted to the teleoperation interface. Finally, while motion-captured chopsticks could provide a better reflection of how humans use chopsticks, the teleoperation interface can produce quality on-hardware demonstrations from which the robot can directly learn.