 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDataClaw: A Process-Oriented Agent Benchmark for Exploratory Real-World Data Analysis
May 04, 2026Evaluating autonomous data analysis agents requires testing their ability to perform exploratory analysis in underexplored data environments. However, many existing benchmarks emphasize final answer accuracy in prior-guided data settings and provide limited support for reasoning process evaluation. We introduce DataClaw, a process-oriented benchmark for exploratory real-world data analysis. DataClaw contains approximately 2.06 million real-world records across enterprise, industry and policy domains, with native data noise preserved. It further includes 492 cross-domain tasks derived from think-tank consulting scenarios, each annotated with intermediate milestones for process-level evaluation. These annotations allow DataClaw to measure how far an agent progresses and where its reasoning breaks down. Experiments with eight advanced LLMs show that current agents remain far from reliable in this setting, with seven models achieving below 50% overall accuracy. Process analysis further reveals partial progress hidden behind wrong answers and distinct exploration strategies across models. Overall, DataClaw provides a less data constrained diagnostic testbed for probing the capability boundaries of autonomous data-analysis agents.
SWE-CI: Evaluating Agent Capabilities in Maintaining Codebases via Continuous Integration
Mar 04, 2026Large language model (LLM)-powered agents have demonstrated strong capabilities in automating software engineering tasks such as static bug fixing, as evidenced by benchmarks like SWE-bench. However, in the real world, the development of mature software is typically predicated on complex requirement changes and long-term feature iterations -- a process that static, one-shot repair paradigms fail to capture. To bridge this gap, we propose \textbf{SWE-CI}, the first repository-level benchmark built upon the Continuous Integration loop, aiming to shift the evaluation paradigm for code generation from static, short-term \textit{functional correctness} toward dynamic, long-term \textit{maintainability}. The benchmark comprises 100 tasks, each corresponding on average to an evolution history spanning 233 days and 71 consecutive commits in a real-world code repository. SWE-CI requires agents to systematically resolve these tasks through dozens of rounds of analysis and coding iterations. SWE-CI provides valuable insights into how well agents can sustain code quality throughout long-term evolution.
HLE-Verified: A Systematic Verification and Structured Revision of Humanity's Last Exam
Feb 17, 2026Humanity's Last Exam (HLE) has become a widely used benchmark for evaluating frontier large language models on challenging, multi-domain questions. However, community-led analyses have raised concerns that HLE contains a non-trivial number of noisy items, which can bias evaluation results and distort cross-model comparisons. To address this challenge, we introduce HLE-Verified, a verified and revised version of HLE with a transparent verification protocol and fine-grained error taxonomy. Our construction follows a two-stage validation-and-repair workflow resulting in a certified benchmark. In Stage I, each item undergoes binary validation of the problem and final answer through domain-expert review and model-based cross-checks, yielding 641 verified items. In Stage II, flawed but fixable items are revised under strict constraints preserving the original evaluation intent, through dual independent expert repairs, model-assisted auditing, and final adjudication, resulting in 1,170 revised-and-certified items. The remaining 689 items are released as a documented uncertain set with explicit uncertainty sources and expertise tags for future refinement. We evaluate seven state-of-the-art language models on HLE and HLE-Verified, observing an average absolute accuracy gain of 7--10 percentage points on HLE-Verified. The improvement is particularly pronounced on items where the original problem statement and/or reference answer is erroneous, with gains of 30--40 percentage points. Our analyses further reveal a strong association between model confidence and the presence of errors in the problem statement or reference answer, supporting the effectiveness of our revisions. Overall, HLE-Verified improves HLE-style evaluations by reducing annotation noise and enabling more faithful measurement of model capabilities. Data is available at: https://github.com/SKYLENAGE-AI/HLE-Verified
Count Every Rotation and Every Rotation Counts: Exploring Drone Dynamics via Propeller Sensing
Nov 17, 2025As drone-based applications proliferate, paramount contactless sensing of airborne drones from the ground becomes indispensable. This work demonstrates concentrating on propeller rotational speed will substantially improve drone sensing performance and proposes an event-camera-based solution, \sysname. \sysname features two components: \textit{Count Every Rotation} achieves accurate, real-time propeller speed estimation by mitigating ultra-high sensitivity of event cameras to environmental noise. \textit{Every Rotation Counts} leverages these speeds to infer both internal and external drone dynamics. Extensive evaluations in real-world drone delivery scenarios show that \sysname achieves a sensing latency of 3$ms$ and a rotational speed estimation error of merely 0.23\%. Additionally, \sysname infers drone flight commands with 96.5\% precision and improves drone tracking accuracy by over 22\% when combined with other sensing modalities. \textit{ Demo: {\color{blue}https://eventpro25.github.io/EventPro/.} }
Enabling High-Frequency Cross-Modality Visual Positioning Service for Accurate Drone Landing
Oct 01, 2025After years of growth, drone-based delivery is transforming logistics. At its core, real-time 6-DoF drone pose tracking enables precise flight control and accurate drone landing. With the widespread availability of urban 3D maps, the Visual Positioning Service (VPS), a mobile pose estimation system, has been adapted to enhance drone pose tracking during the landing phase, as conventional systems like GPS are unreliable in urban environments due to signal attenuation and multi-path propagation. However, deploying the current VPS on drones faces limitations in both estimation accuracy and efficiency. In this work, we redesign drone-oriented VPS with the event camera and introduce EV-Pose to enable accurate, high-frequency 6-DoF pose tracking for accurate drone landing. EV-Pose introduces a spatio-temporal feature-instructed pose estimation module that extracts a temporal distance field to enable 3D point map matching for pose estimation; and a motion-aware hierarchical fusion and optimization scheme to enhance the above estimation in accuracy and efficiency, by utilizing drone motion in the \textit{early stage} of event filtering and the \textit{later stage} of pose optimization. Evaluation shows that EV-Pose achieves a rotation accuracy of 1.34$\degree$ and a translation accuracy of 6.9$mm$ with a tracking latency of 10.08$ms$, outperforming baselines by $>$50\%, \tmcrevise{thus enabling accurate drone landings.} Demo: https://ev-pose.github.io/
Contrastive Deep Nonnegative Matrix Factorization for Community Detection
Nov 04, 2023Recently, nonnegative matrix factorization (NMF) has been widely adopted for community detection, because of its better interpretability. However, the existing NMF-based methods have the following three problems: 1) they directly transform the original network into community membership space, so it is difficult for them to capture the hierarchical information; 2) they often only pay attention to the topology of the network and ignore its node attributes; 3) it is hard for them to learn the global structure information necessary for community detection. Therefore, we propose a new community detection algorithm, named Contrastive Deep Nonnegative Matrix Factorization (CDNMF). Firstly, we deepen NMF to strengthen its capacity for information extraction. Subsequently, inspired by contrastive learning, our algorithm creatively constructs network topology and node attributes as two contrasting views. Furthermore, we utilize a debiased negative sampling layer and learn node similarity at the community level, thereby enhancing the suitability of our model for community detection. We conduct experiments on three public real graph datasets and the proposed model has achieved better results than state-of-the-art methods. Code available at https://github.com/6lyc/CDNMF.git.
MLRSNet: A Multi-label High Spatial Resolution Remote Sensing Dataset for Semantic Scene Understanding
Oct 01, 2020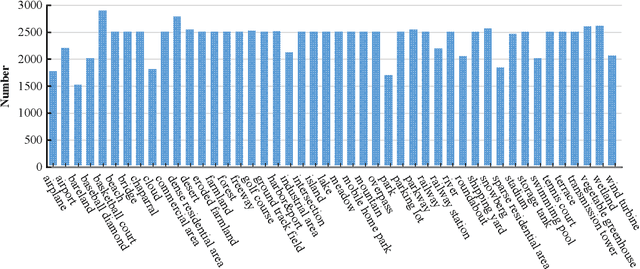
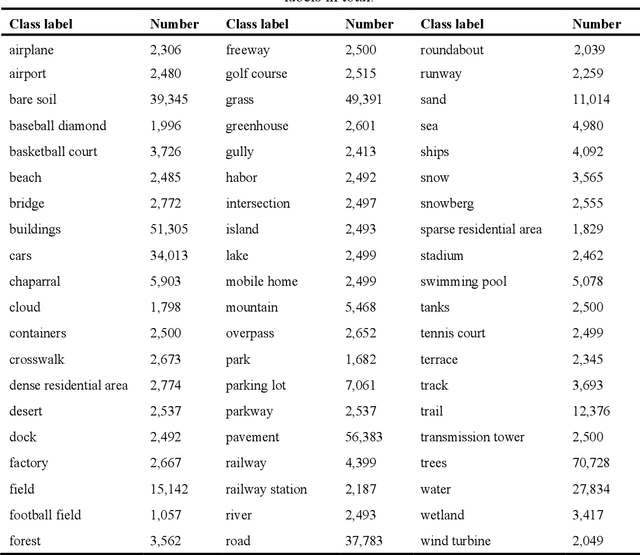
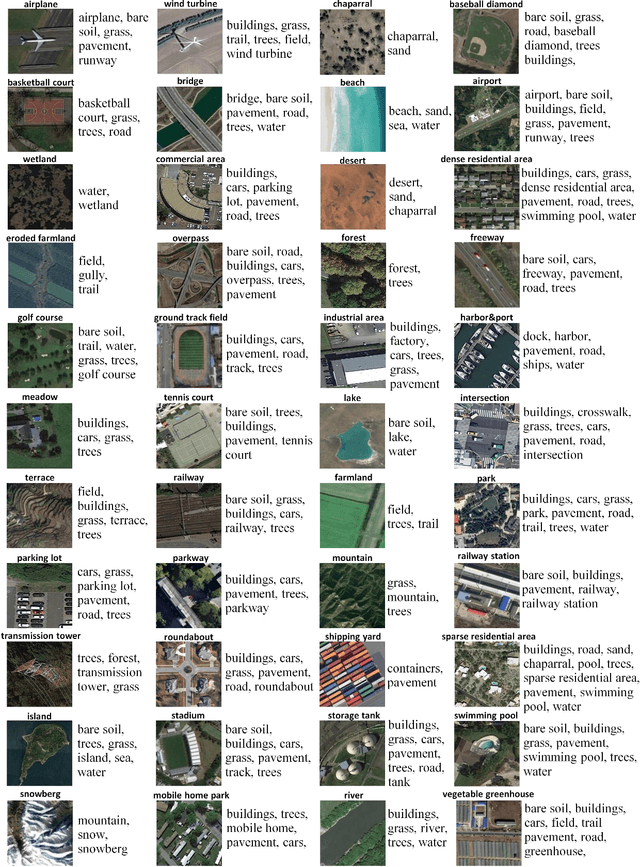
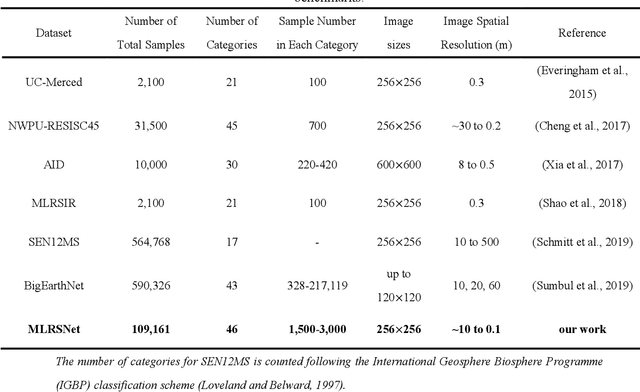
To better understand scene images in the field of remote sensing, multi-label annotation of scene images is necessary. Moreover, to enhance the performance of deep learning models for dealing with semantic scene understanding tasks, it is vital to train them on large-scale annotated data. However, most existing datasets are annotated by a single label, which cannot describe the complex remote sensing images well because scene images might have multiple land cover classes. Few multi-label high spatial resolution remote sensing datasets have been developed to train deep learning models for multi-label based tasks, such as scene classification and image retrieval. To address this issue, in this paper, we construct a multi-label high spatial resolution remote sensing dataset named MLRSNet for semantic scene understanding with deep learning from the overhead perspective. It is composed of high-resolution optical satellite or aerial images. MLRSNet contains a total of 109,161 samples within 46 scene categories, and each image has at least one of 60 predefined labels. We have designed visual recognition tasks, including multi-label based image classification and image retrieval, in which a wide variety of deep learning approaches are evaluated with MLRSNet. The experimental results demonstrate that MLRSNet is a significant benchmark for future research, and it complements the current widely used datasets such as ImageNet, which fills gaps in multi-label image research. Furthermore, we will continue to expand the MLRSNet. MLRSNet and all related materials have been made publicly available at https://data.mendeley.com/datasets/7j9bv9vwsx/2 and https://github.com/cugbrs/MLRSNet.git.