 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSAGE-Nav: Leveraging LLM Planning and Alignment Fusion for Hierarchical Scene Graph-Guided Navigation
Jun 24, 2026Object-Goal Navigation (ObjNav) requires embodied agents to autonomously locate specified targets using only egocentric visual observations. Existing monolithic methods struggle with long-horizon reasoning and generalize poorly to novel environments. To address these limitations, we propose SAGE-Nav, a novel hierarchical framework that integrates the reasoning capabilities of Large Language Models (LLMs) with dynamic scene graphs. Crucially, it decouples asynchronous global semantic planning from the high-frequency reactive control loop. The LLM serves as a global planner, decomposing abstract instructions into a sequence of semantically grounded waypoints. To translate these plans into dense multi-modal guidance, we design a Hierarchical Scene Graph Encoder (HSGE) that leverages relational graph convolutions to produce structure-aware embeddings preserving both semantic and spatial topology. Furthermore, we develop the Goal-aware Alignment-Fusion Network (GAFN) to dynamically fuse real-time perception with these structural priors. Using an adaptive gating mechanism with an explicit inductive bias, GAFN ensures robust visual-topological alignment for the low-level policy. Extensive evaluations in the i-THOR and RoboTHOR environments demonstrate that SAGE-Nav achieves state-of-the-art performance, delivering substantial gains in navigation efficiency and zero-shot generalization while maintaining the low control latency required for physical robotic deployment.
VAG: Dual-Stream Video-Action Generation for Embodied Data Synthesis
Apr 10, 2026Recent advances in robot foundation models trained on large-scale human teleoperation data have enabled robots to perform increasingly complex real-world tasks. However, scaling these systems remains difficult because collecting task-specific demonstrations is expensive and labor-intensive. Synthetic data, especially generated videos, offer a promising direction, but existing World Models (WMs) are not directly suitable for policy learning since they do not provide paired action trajectories. World-Action (WA) models partially address this by predicting actions with visual outputs, yet often lack strong video-action alignment, while two-stage pipelines that generate video first and then infer actions introduce inefficiency and error accumulation. To address these limitations, we propose VAG, a unified flow-matching-based dual-stream framework that jointly generates video and action under visual and language conditioning. By synchronizing denoising in both branches and using an adaptive 3D pooling mechanism to transfer compact global video context to the action branch, VAG improves cross-modal consistency during generation. Across both simulated and real-world settings, VAG produces aligned video-action pairs with competitive prediction quality, supports executable trajectory replay, and provides useful synthetic pretraining data that improves downstream policy generalization, indicating its potential as a practical world-action model for embodied data synthesis.
UltraLBM-UNet: Ultralight Bidirectional Mamba-based Model for Skin Lesion Segmentation
Dec 25, 2025Skin lesion segmentation is a crucial step in dermatology for guiding clinical decision-making. However, existing methods for accurate, robust, and resource-efficient lesion analysis have limitations, including low performance and high computational complexity. To address these limitations, we propose UltraLBM-UNet, a lightweight U-Net variant that integrates a bidirectional Mamba-based global modeling mechanism with multi-branch local feature perception. The proposed architecture integrates efficient local feature injection with bidirectional state-space modeling, enabling richer contextual interaction across spatial dimensions while maintaining computational compactness suitable for point-of-care deployment. Extensive experiments on the ISIC 2017, ISIC 2018, and PH2 datasets demonstrate that our model consistently achieves state-of-the-art segmentation accuracy, outperforming existing lightweight and Mamba counterparts with only 0.034M parameters and 0.060 GFLOPs. In addition, we introduce a hybrid knowledge distillation strategy to train an ultra-compact student model, where the distilled variant UltraLBM-UNet-T, with only 0.011M parameters and 0.019 GFLOPs, achieves competitive segmentation performance. These results highlight the suitability of UltraLBM-UNet for point-of-care deployment, where accurate and robust lesion analyses are essential. The source code is publicly available at https://github.com/LinLinLin-X/UltraLBM-UNet.
L2Calib: $SE(3)$-Manifold Reinforcement Learning for Robust Extrinsic Calibration with Degenerate Motion Resilience
Aug 08, 2025Extrinsic calibration is essential for multi-sensor fusion, existing methods rely on structured targets or fully-excited data, limiting real-world applicability. Online calibration further suffers from weak excitation, leading to unreliable estimates. To address these limitations, we propose a reinforcement learning (RL)-based extrinsic calibration framework that formulates extrinsic calibration as a decision-making problem, directly optimizes $SE(3)$ extrinsics to enhance odometry accuracy. Our approach leverages a probabilistic Bingham distribution to model 3D rotations, ensuring stable optimization while inherently retaining quaternion symmetry. A trajectory alignment reward mechanism enables robust calibration without structured targets by quantitatively evaluating estimated tightly-coupled trajectory against a reference trajectory. Additionally, an automated data selection module filters uninformative samples, significantly improving efficiency and scalability for large-scale datasets. Extensive experiments on UAVs, UGVs, and handheld platforms demonstrate that our method outperforms traditional optimization-based approaches, achieving high-precision calibration even under weak excitation conditions. Our framework simplifies deployment on diverse robotic platforms by eliminating the need for high-quality initial extrinsics and enabling calibration from routine operating data. The code is available at https://github.com/APRIL-ZJU/learn-to-calibrate.
Monocular Event-Inertial Odometry with Adaptive decay-based Time Surface and Polarity-aware Tracking
Sep 21, 2024Event cameras have garnered considerable attention due to their advantages over traditional cameras in low power consumption, high dynamic range, and no motion blur. This paper proposes a monocular event-inertial odometry incorporating an adaptive decay kernel-based time surface with polarity-aware tracking. We utilize an adaptive decay-based Time Surface to extract texture information from asynchronous events, which adapts to the dynamic characteristics of the event stream and enhances the representation of environmental textures. However, polarity-weighted time surfaces suffer from event polarity shifts during changes in motion direction. To mitigate its adverse effects on feature tracking, we optimize the feature tracking by incorporating an additional polarity-inverted time surface to enhance the robustness. Comparative analysis with visual-inertial and event-inertial odometry methods shows that our approach outperforms state-of-the-art techniques, with competitive results across various datasets.
Gaussian-LIC: Photo-realistic LiDAR-Inertial-Camera SLAM with 3D Gaussian Splatting
Apr 10, 2024



We present a real-time LiDAR-Inertial-Camera SLAM system with 3D Gaussian Splatting as the mapping backend. Leveraging robust pose estimates from our LiDAR-Inertial-Camera odometry, Coco-LIC, an incremental photo-realistic mapping system is proposed in this paper. We initialize 3D Gaussians from colorized LiDAR points and optimize them using differentiable rendering powered by 3D Gaussian Splatting. Meticulously designed strategies are employed to incrementally expand the Gaussian map and adaptively control its density, ensuring high-quality mapping with real-time capability. Experiments conducted in diverse scenarios demonstrate the superior performance of our method compared to existing radiance-field-based SLAM systems.
Coco-LIC: Continuous-Time Tightly-Coupled LiDAR-Inertial-Camera Odometry using Non-Uniform B-spline
Sep 18, 2023



In this paper, we propose an efficient continuous-time LiDAR-Inertial-Camera Odometry, utilizing non-uniform B-splines to tightly couple measurements from the LiDAR, IMU, and camera. In contrast to uniform B-spline-based continuous-time methods, our non-uniform B-spline approach offers significant advantages in terms of achieving real-time efficiency and high accuracy. This is accomplished by dynamically and adaptively placing control points, taking into account the varying dynamics of the motion. To enable efficient fusion of heterogeneous LiDAR-Inertial-Camera data within a short sliding-window optimization, we assign depth to visual pixels using corresponding map points from a global LiDAR map, and formulate frame-to-map reprojection factors for the associated pixels in the current image frame. This way circumvents the necessity for depth optimization of visual pixels, which typically entails a lengthy sliding window with numerous control points for continuous-time trajectory estimation. We conduct dedicated experiments on real-world datasets to demonstrate the advantage and efficacy of adopting non-uniform continuous-time trajectory representation. Our LiDAR-Inertial-Camera odometry system is also extensively evaluated on both challenging scenarios with sensor degenerations and large-scale scenarios, and has shown comparable or higher accuracy than the state-of-the-art methods. The codebase of this paper will also be open-sourced at https://github.com/APRIL-ZJU/Coco-LIC.
Correlation Pyramid Network for 3D Single Object Tracking
May 16, 2023



3D LiDAR-based single object tracking (SOT) has gained increasing attention as it plays a crucial role in 3D applications such as autonomous driving. The central problem is how to learn a target-aware representation from the sparse and incomplete point clouds. In this paper, we propose a novel Correlation Pyramid Network (CorpNet) with a unified encoder and a motion-factorized decoder. Specifically, the encoder introduces multi-level self attentions and cross attentions in its main branch to enrich the template and search region features and realize their fusion and interaction, respectively. Additionally, considering the sparsity characteristics of the point clouds, we design a lateral correlation pyramid structure for the encoder to keep as many points as possible by integrating hierarchical correlated features. The output features of the search region from the encoder can be directly fed into the decoder for predicting target locations without any extra matcher. Moreover, in the decoder of CorpNet, we design a motion-factorized head to explicitly learn the different movement patterns of the up axis and the x-y plane together. Extensive experiments on two commonly-used datasets show our CorpNet achieves state-of-the-art results while running in real-time.
Continuous-Time Fixed-Lag Smoothing for LiDAR-Inertial-Camera SLAM
Feb 15, 2023Localization and mapping with heterogeneous multi-sensor fusion have been prevalent in recent years. To adequately fuse multi-modal sensor measurements received at different time instants and different frequencies, we estimate the continuous-time trajectory by fixed-lag smoothing within a factor-graph optimization framework. With the continuous-time formulation, we can query poses at any time instants corresponding to the sensor measurements. To bound the computation complexity of the continuous-time fixed-lag smoother, we maintain temporal and keyframe sliding windows with constant size, and probabilistically marginalize out control points of the trajectory and other states, which allows preserving prior information for future sliding-window optimization. Based on continuous-time fixed-lag smoothing, we design tightly-coupled multi-modal SLAM algorithms with a variety of sensor combinations, like the LiDAR-inertial and LiDAR-inertial-camera SLAM systems, in which online timeoffset calibration is also naturally supported. More importantly, benefiting from the marginalization and our derived analytical Jacobians for optimization, the proposed continuous-time SLAM systems can achieve real-time performance regardless of the high complexity of continuous-time formulation. The proposed multi-modal SLAM systems have been widely evaluated on three public datasets and self-collect datasets. The results demonstrate that the proposed continuous-time SLAM systems can achieve high-accuracy pose estimations and outperform existing state-of-the-art methods. To benefit the research community, we will open source our code at ~\url{https://github.com/APRIL-ZJU/clic}.
Ctrl-VIO: Continuous-Time Visual-Inertial Odometry for Rolling Shutter Cameras
Aug 25, 2022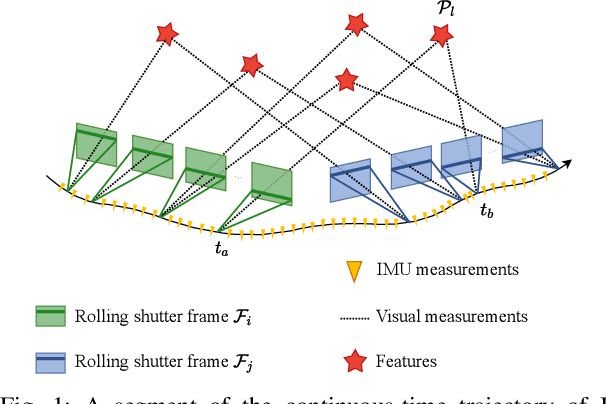
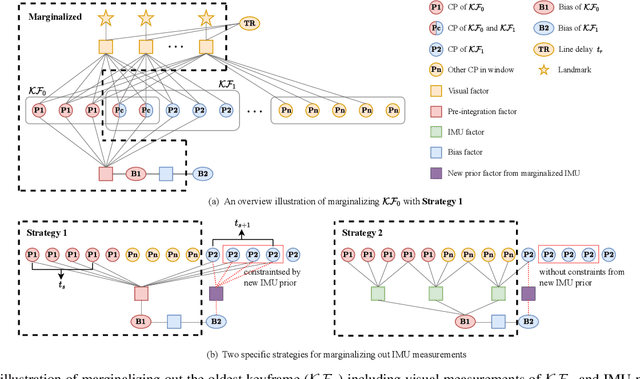
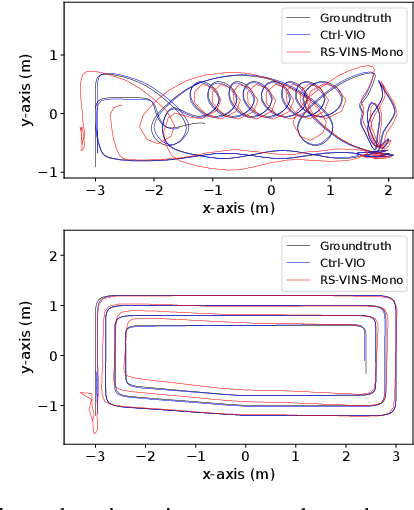
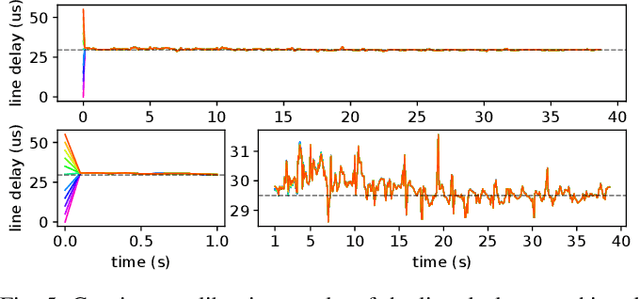
In this paper, we propose a probabilistic continuous-time visual-inertial odometry (VIO) for rolling shutter cameras. The continuous-time trajectory formulation naturally facilitates the fusion of asynchronized high-frequency IMU data and motion-distorted rolling shutter images. To prevent intractable computation load, the proposed VIO is sliding-window and keyframe-based. We propose to probabilistically marginalize the control points to keep the constant number of keyframes in the sliding window. Furthermore, the line exposure time difference (line delay) of the rolling shutter camera can be online calibrated in our continuous-time VIO. To extensively examine the performance of our continuous-time VIO, experiments are conducted on publicly-available WHU-RSVI, TUM-RSVI, and SenseTime-RSVI rolling shutter datasets. The results demonstrate the proposed continuous-time VIO significantly outperforms the existing state-of-the-art VIO methods. The codebase of this paper will also be open-sourced at \url{https://github.com/APRIL-ZJU/Ctrl-VIO}.