 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCanopy Density Estimation in Perennial Horticulture Crops Using 3D Spinning LiDAR SLAM
Jul 30, 2020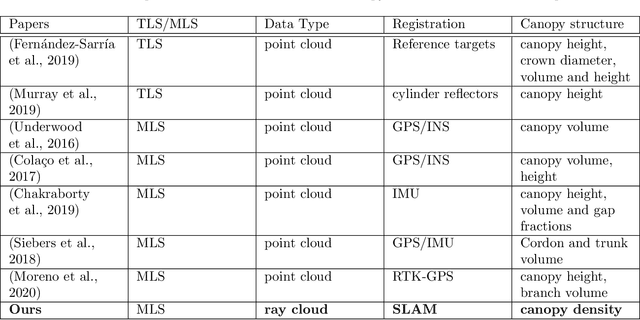
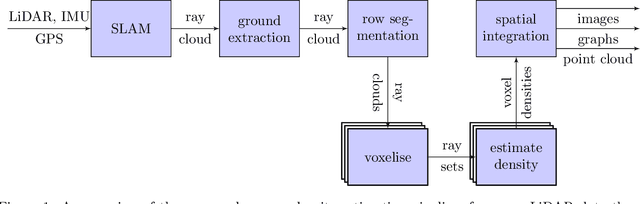
We propose a 3D ray cloud based method for estimating the canopy density of vineyards and orchards that have been scanned by a vehicle-mounted mobile 3D spinning LiDAR (AgScan3D). The method is composed of two parts. Firstly, the AgScan3D data is processed through a Continuous-Time SLAM algorithm into a globally registered 3D ray cloud. The global ray cloud is a canonical data format (a digital twin) from which we can compare vineyard snapshots over multiple times within a season and across seasons. Secondly, the vineyard rows are automatically extracted from the ray cloud and a novel density calculation is performed to estimate the maximum likelihood canopy densities of the vineyard. This combination of digital twinning, together with the accurate extraction of canopy structure information, allows entire vineyards to be analysed and compared, across the growing season and from year to year. The proposed method is evaluated both in simulation and field experiments. Field experiments were performed at four sites, which varied in vineyard structure and vine management, over two growing seasons, resulting in a total traversal of 160 kilometres, 42.4 scanned hectares of vines with a combined total of approximately 93000 of scanned vines. The field datasets and ray cloud library will be released publicly.
Noise-robust Named Entity Understanding for Virtual Assistants
May 29, 2020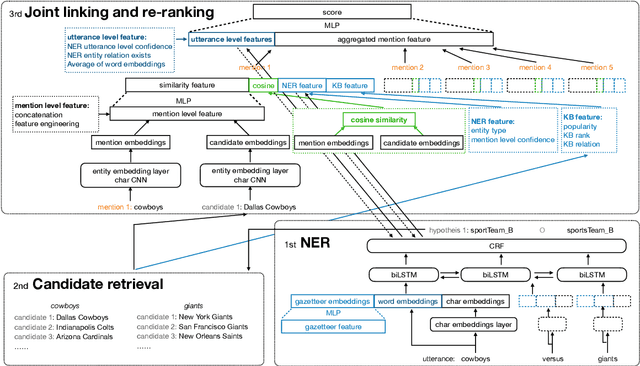
Named Entity Understanding (NEU) plays an essential role in interactions between users and voice assistants, since successfully identifying entities and correctly linking them to their standard forms is crucial to understanding the user's intent. NEU is a challenging task in voice assistants due to the ambiguous nature of natural language and because noise introduced by speech transcription and user errors occur frequently in spoken natural language queries. In this paper, we propose an architecture with novel features that jointly solves the recognition of named entities (a.k.a. Named Entity Recognition, or NER) and the resolution to their canonical forms (a.k.a. Entity Linking, or EL). We show that by combining NER and EL information in a joint reranking module, our proposed framework improves accuracy in both tasks. This improved performance and the features that enable it, also lead to better accuracy in downstream tasks, such as domain classification and semantic parsing.
Lattice-based Improvements for Voice Triggering Using Graph Neural Networks
Jan 25, 2020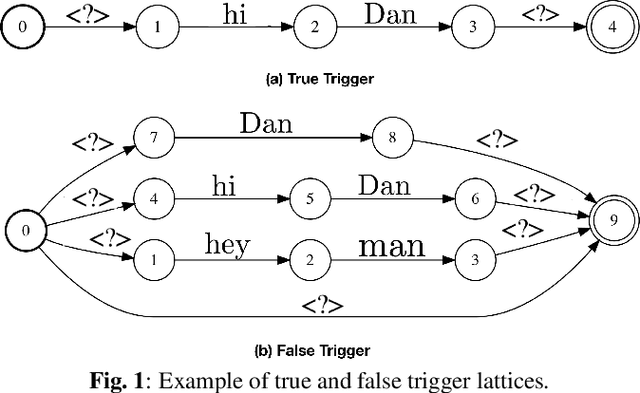
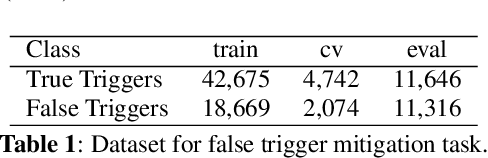
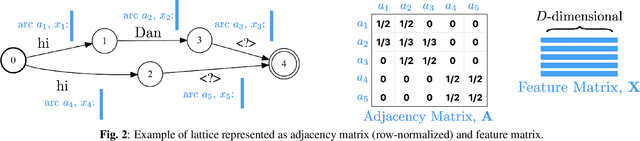
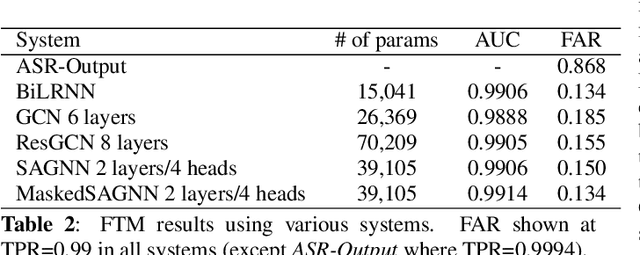
Voice-triggered smart assistants often rely on detection of a trigger-phrase before they start listening for the user request. Mitigation of false triggers is an important aspect of building a privacy-centric non-intrusive smart assistant. In this paper, we address the task of false trigger mitigation (FTM) using a novel approach based on analyzing automatic speech recognition (ASR) lattices using graph neural networks (GNN). The proposed approach uses the fact that decoding lattice of a falsely triggered audio exhibits uncertainties in terms of many alternative paths and unexpected words on the lattice arcs as compared to the lattice of a correctly triggered audio. A pure trigger-phrase detector model doesn't fully utilize the intent of the user speech whereas by using the complete decoding lattice of user audio, we can effectively mitigate speech not intended for the smart assistant. We deploy two variants of GNNs in this paper based on 1) graph convolution layers and 2) self-attention mechanism respectively. Our experiments demonstrate that GNNs are highly accurate in FTM task by mitigating ~87% of false triggers at 99% true positive rate (TPR). Furthermore, the proposed models are fast to train and efficient in parameter requirements.
Poisson Multi-Bernoulli Mixtures for Sets of Trajectories
Dec 17, 2019
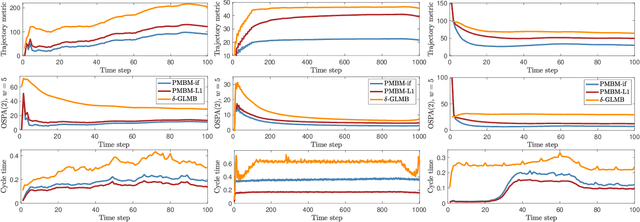
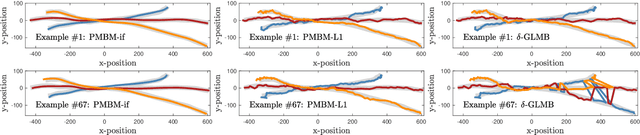
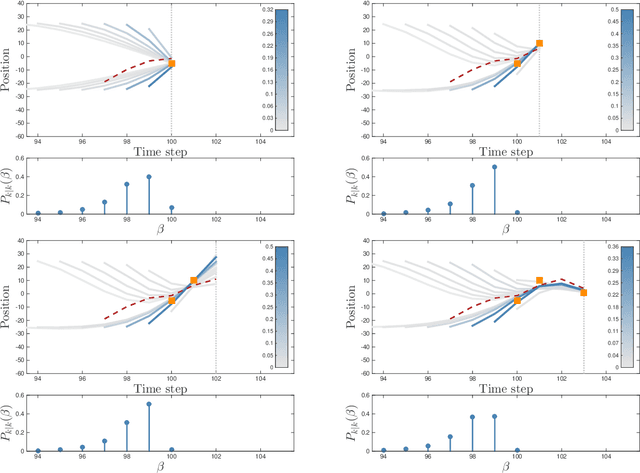
For the standard point target model with Poisson birth process, the Poisson Multi-Bernoulli Mixture (PMBM) is a conjugate multi-target density. The PMBM filter for sets of targets has been shown to have state-of-the-art performance and a structure similar to the Multiple Hypothesis Tracker (MHT). In this paper we consider a recently developed formulation of multiple target tracking as a random finite set (RFS) of trajectories, and present three important and interesting results. First, we show that, for the standard point target model, the PMBM density is conjugate also for sets of trajectories. Second, based on this we develop PMBM trackers (trajectory RFS filters) that efficiently estimate the set of trajectories. Third, we establish that for the standard point target model the multi-trajectory density is PMBM for trajectories in any time window, given measurements in any (possibly non-overlapping) time window. In addition, the PMBM trackers are evaluated in a simulation study, and shown to yield state-of-the-art performance.
Leveraging User Engagement Signals For Entity Labeling in a Virtual Assistant
Sep 18, 2019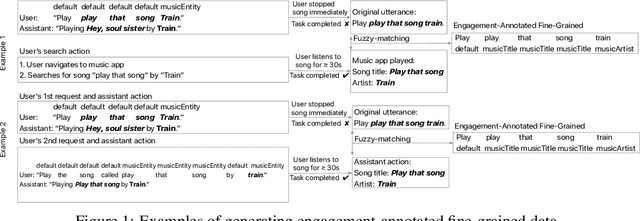
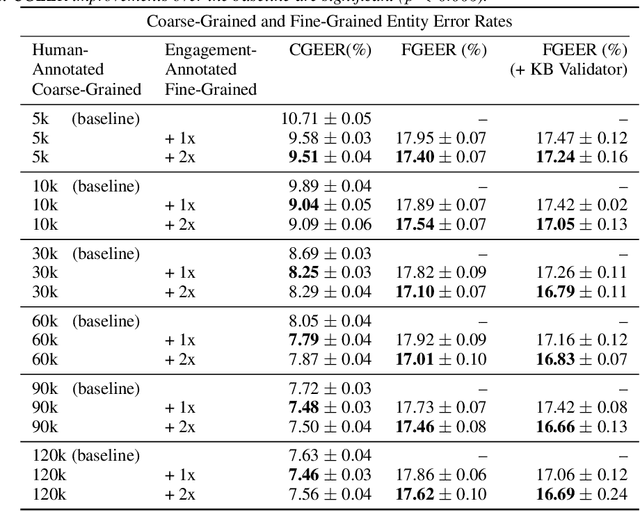
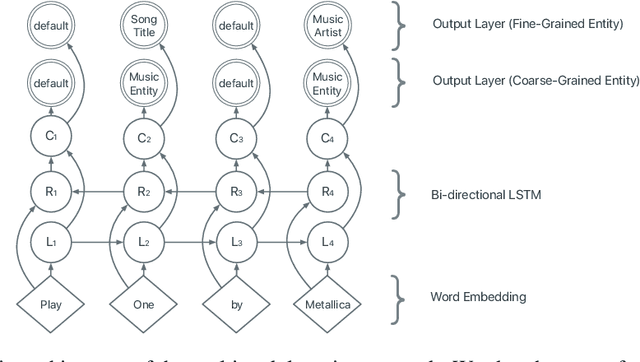
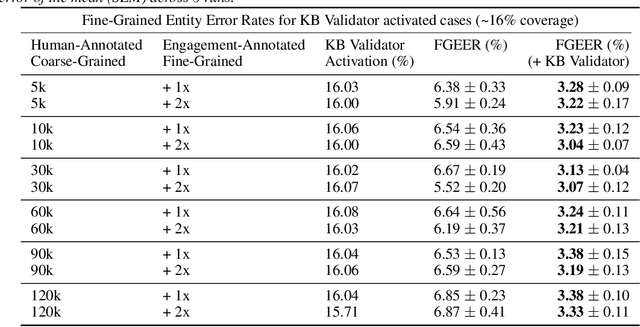
Personal assistant AI systems such as Siri, Cortana, and Alexa have become widely used as a means to accomplish tasks through natural language commands. However, components in these systems generally rely on supervised machine learning algorithms that require large amounts of hand-annotated training data, which is expensive and time consuming to collect. The ability to incorporate unsupervised, weakly supervised, or distantly supervised data holds significant promise in overcoming this bottleneck. In this paper, we describe a framework that leverages user engagement signals (user behaviors that demonstrate a positive or negative response to content) to automatically create granular entity labels for training data augmentation. Strategies such as multi-task learning and validation using an external knowledge base are employed to incorporate the engagement annotated data and to boost the model's accuracy on a sequence labeling task. Our results show that learning from data automatically labeled by user engagement signals achieves significant accuracy gains in a production deep learning system, when measured on both the sequence labeling task as well as on user facing results produced by the system end-to-end. We believe this is the first use of user engagement signals to help generate training data for a sequence labeling task on a large scale, and can be applied in practical settings to speed up new feature deployment when little human annotated data is available.
The Second Conversational Intelligence Challenge (ConvAI2)
Jan 31, 2019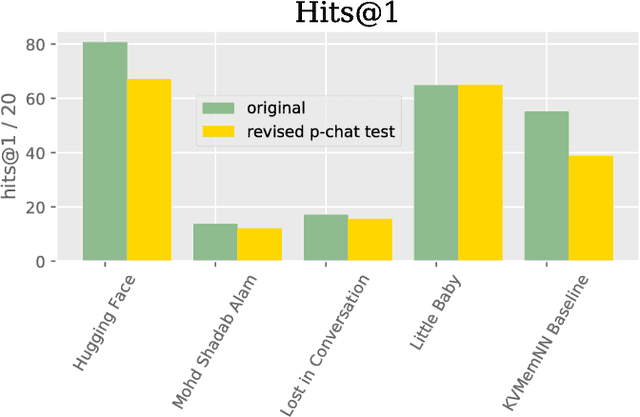

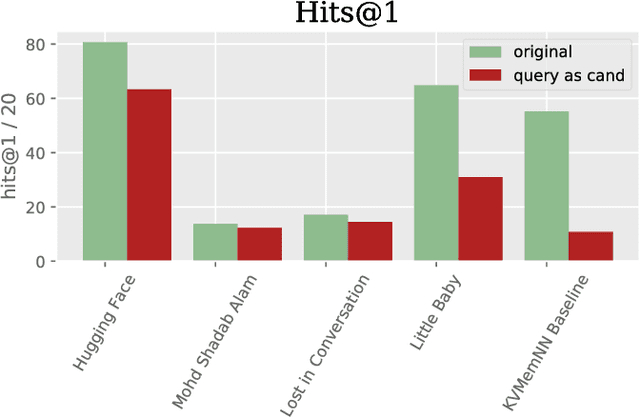
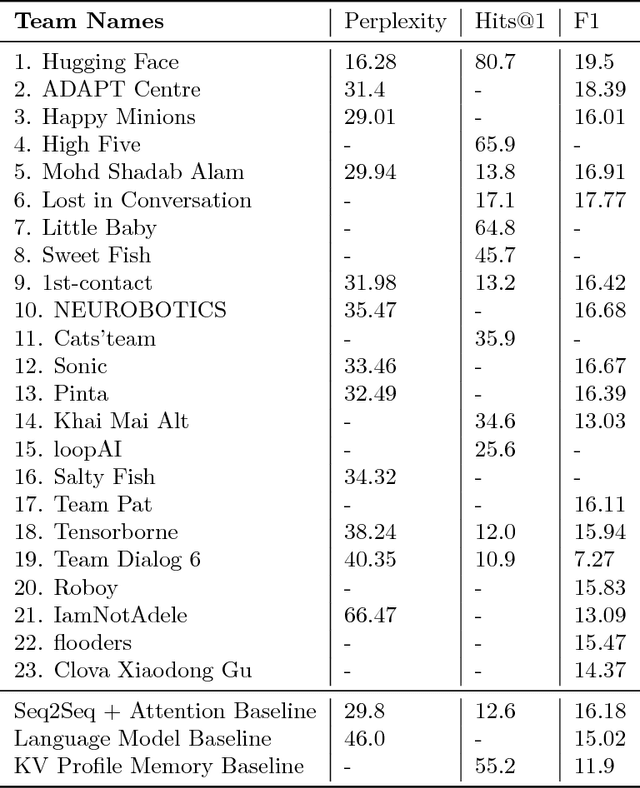
We describe the setting and results of the ConvAI2 NeurIPS competition that aims to further the state-of-the-art in open-domain chatbots. Some key takeaways from the competition are: (i) pretrained Transformer variants are currently the best performing models on this task, (ii) but to improve performance on multi-turn conversations with humans, future systems must go beyond single word metrics like perplexity to measure the performance across sequences of utterances (conversations) -- in terms of repetition, consistency and balance of dialogue acts (e.g. how many questions asked vs. answered).