 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign of Stickbug: a Six-Armed Precision Pollination Robot
Apr 04, 2024



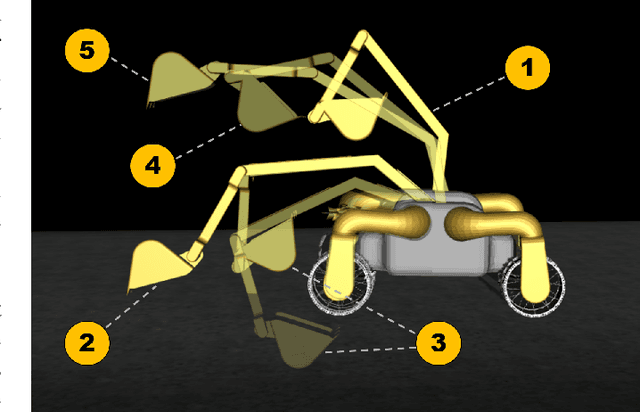
This work presents the design of Stickbug, a six-armed, multi-agent, precision pollination robot that combines the accuracy of single-agent systems with swarm parallelization in greenhouses. Precision pollination robots have often been proposed to offset the effects of a decreasing population of natural pollinators, but they frequently lack the required parallelization and scalability. Stickbug achieves this by allowing each arm and drive base to act as an individual agent, significantly reducing planning complexity. Stickbug uses a compact holonomic Kiwi drive to navigate narrow greenhouse rows, a tall mast to support multiple manipulators and reach plant heights, a detection model and classifier to identify Bramble flowers, and a felt-tipped end-effector for contact-based pollination. Initial experimental validation demonstrates that Stickbug can attempt over 1.5 pollinations per minute with a 50% success rate. Additionally, a Bramble flower perception dataset was created and is publicly available alongside Stickbug's software and design files.
NASA Space Robotics Challenge 2 Qualification Round: An Approach to Autonomous Lunar Rover Operations
Sep 20, 2021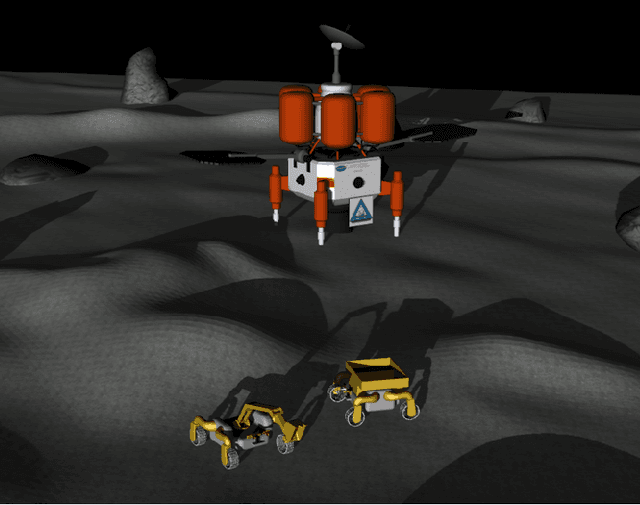
Plans for establishing a long-term human presence on the Moon will require substantial increases in robot autonomy and multi-robot coordination to support establishing a lunar outpost. To achieve these objectives, algorithm design choices for the software developments need to be tested and validated for expected scenarios such as autonomous in-situ resource utilization (ISRU), localization in challenging environments, and multi-robot coordination. However, real-world experiments are extremely challenging and limited for extraterrestrial environment. Also, realistic simulation demonstrations in these environments are still rare and demanded for initial algorithm testing capabilities. To help some of these needs, the NASA Centennial Challenges program established the Space Robotics Challenge Phase 2 (SRC2) which consist of virtual robotic systems in a realistic lunar simulation environment, where a group of mobile robots were tasked with reporting volatile locations within a global map, excavating and transporting these resources, and detecting and localizing a target of interest. The main goal of this article is to share our team's experiences on the design trade-offs to perform autonomous robotic operations in a virtual lunar environment and to share strategies to complete the mission requirements posed by NASA SRC2 competition during the qualification round. Of the 114 teams that registered for participation in the NASA SRC2, team Mountaineers finished as one of only six teams to receive the top qualification round prize.
Search Planning of a UAV/UGV Team with Localization Uncertainty in a Subterranean Environment
Feb 11, 2021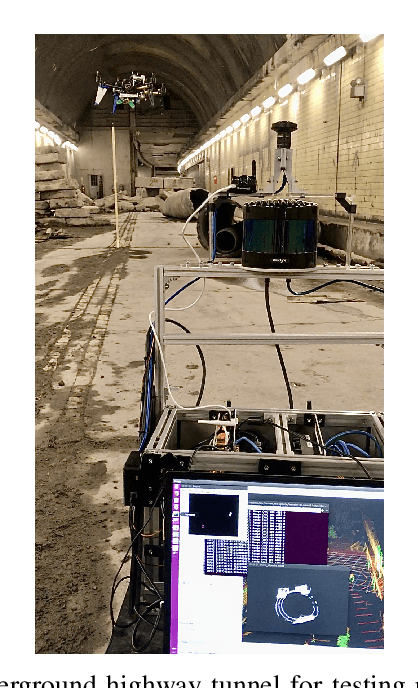
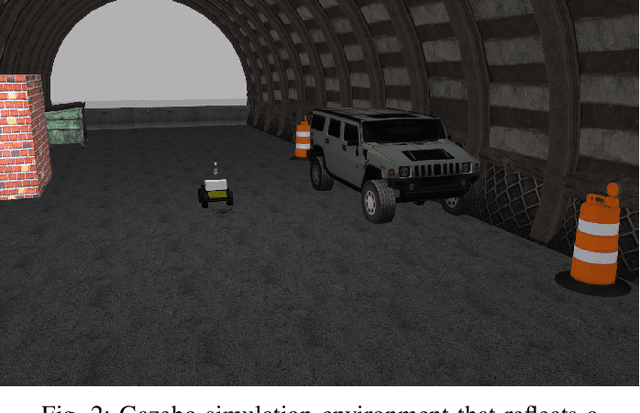
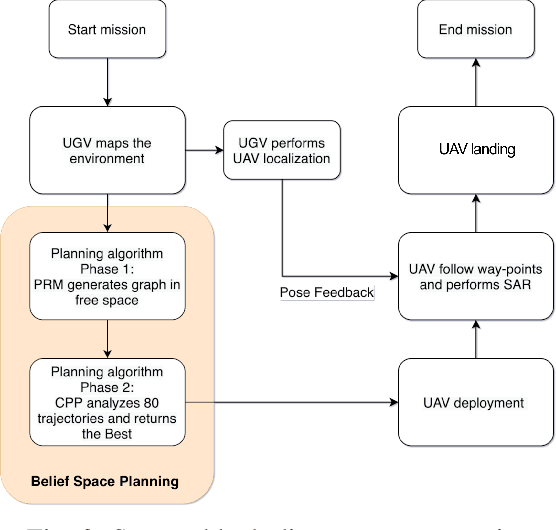
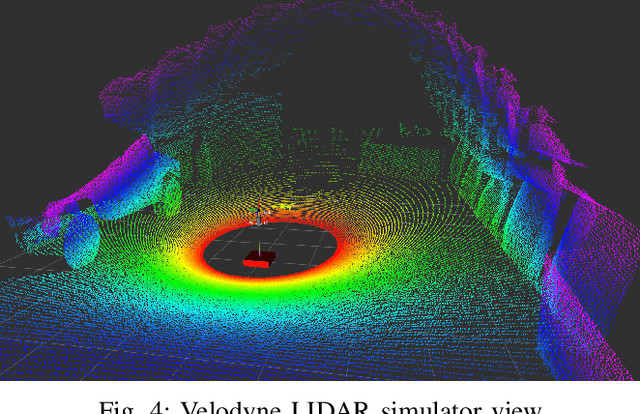
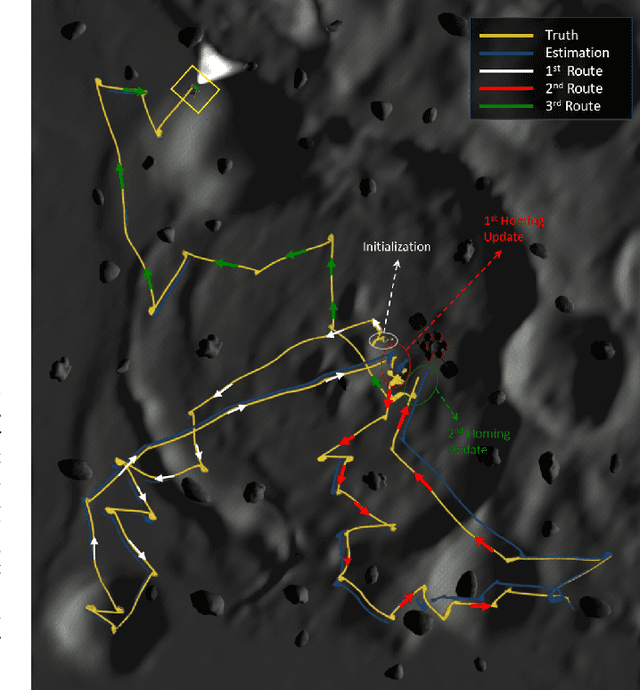
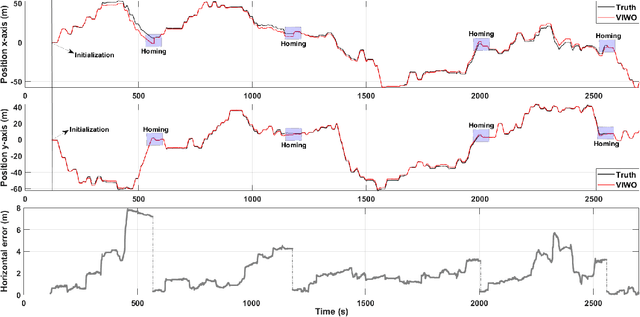
We present a waypoint planning algorithm for an unmanned aerial vehicle (UAV) that is teamed with an unmanned ground vehicle (UGV) for the task of search and rescue in a subterranean environment. The UAV and UGV are teamed such that the localization of the UAV is conducted on the UGV via the multi-sensor fusion of a fish-eye camera, 3D LIDAR, ranging radio, and a laser altimeter. Likewise, the trajectory planning of the UAV is conducted on the UGV, which is assumed to have a 3D map of the environment (e.g., from Simultaneous Localization and Mapping). The goal of the planning algorithm is to satisfy the mission's exploration criteria while reducing the localization error of the UAV by evaluating the belief space for potential exploration routes. The presented algorithm is evaluated in a relevant simulation environment where the planning algorithm is shown to be effective at reducing the localization errors of the UAV.