 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
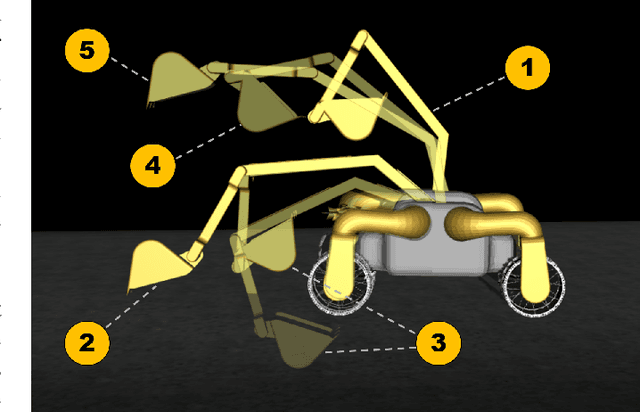
Add to EdgeAffordance-Based Hierarchical Reinforcement Learning for Quadruped Pedipulation
Jun 05, 2026The object manipulation capabilities of quadruped robots is an open research challenge. While previous studies have focused on low-level policy learning, task execution still relies on expert-designed high-level trajectories. Autonomous selection of both an affordable interaction point on the target object and an affordable robot base pose removes the need for pre-designed trajectories. This study proposes a three-level hierarchical reinforcement learning (RL) framework that utilizes pose affordances to guide the navigation policy, while the navigation policy drives the locomotion policy. In addition, the pedipulation policy is guided by interaction-point affordances, enabling object-centric pose alignment of the quadruped robot and effective end-effector manipulation planning. We train the proposed framework in the IsaacSim ecosystem and evaluate it in both simulation and real-world settings. We investigate the effectiveness of pose affordance across multiple scenarios in simulation while various object interaction tasks are validated on real-world setting forming an object-interaction dataset. The results show that the proposed framework can autonomously identify candidate poses based on their affordance and successfully execute object manipulation tasks in the real world without human guidance.
Learning Contact Representation for Leg Odometry
Jun 03, 2026The estimation of odometry in legged robots depends on the assumption that the velocity of the foot with respect to the world remains zero during the stance phase. Feedback for the main body velocity is derived from the kinematic serial chain of the feet making accurate leg phase detection is a critical subproblem. A considerable number of studies employ ground reaction force sensors mounted at the tip of the foot to classify, yet these sensors may not be universally available for all legged robots. Additionally, these sensors are often unresponsive to unaccounted disturbances, such as slippage, while the foot remains in contact with the ground. In this study, we propose a self-supervised representation learning framework for contact detection that utilizes the standard sensor set of joint encoders without reliance on force sensor augmentations. We employ learned representations to model the stance and swing phases probabilistically. The experimental results obtained confirm the efficacy of the proposed self-supervised contact detector. Our framework exhibited superior performance in comparison to supervised methods which necessitate sensor set augmentation and labeling, as well as baseline probabilistic approaches. Additionally, we make our code available to the public.
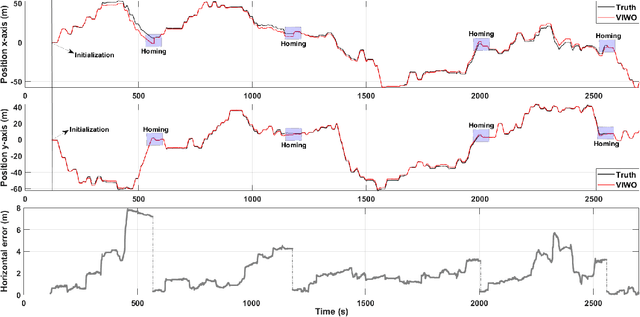
OCELOT: Odometry and Contact Estimation for Legged Robots
May 21, 2026One of the significant challenges in legged robotics is achieving accurate odometry using only onboard proprioceptive sensors. In this study, we present a complete leg odometry pipeline based on an Error-State EKF (ESEKF) that relies exclusively on proprioceptive data: a body fixed IMU, joint encoders, and force sensors, where filter's state is corrected by feet determined to be in a stationary stance. The core of our contribution is fused contact detection and an uncertainty quantification module designed to explicitly identify and reject slippage. This module runs two detectors in parallel for each foot, 1) a debounced, force-based Gaussian Mixture Model (GMM) guided Finite State Machine (FSM) to confirm physical contact, and 2) a kinematic-based Generalized Likelihood Ratio Test (GLRT) on the estimated velocity of the foot. The continuous quality scores from both estimators are fused to detect if the foot is both physically loaded and kinematically stationary and served as an uncertainty signal for each contact. To validate our approach, we collected a multi-modal dataset of 29 sequences spanning diverse indoor and outdoor terrains (e.g., concrete, grass, pebble, and rock) total of 2.4 km long. We benchmarked our approach against both proprioceptive and exteroceptive methods. The results demonstrate our method's efficacy in providing accurate odometry estimates, robustly handling slippage-prone environments. We also share our code and real-time ROS2 package as open-source.
Learning Rock Pushability on Rough Planetary Terrain
May 14, 2025



In the context of mobile navigation in unstructured environments, the predominant approach entails the avoidance of obstacles. The prevailing path planning algorithms are contingent upon deviating from the intended path for an indefinite duration and returning to the closest point on the route after the obstacle is left behind spatially. However, avoiding an obstacle on a path that will be used repeatedly by multiple agents can hinder long-term efficiency and lead to a lasting reliance on an active path planning system. In this study, we propose an alternative approach to mobile navigation in unstructured environments by leveraging the manipulation capabilities of a robotic manipulator mounted on top of a mobile robot. Our proposed framework integrates exteroceptive and proprioceptive feedback to assess the push affordance of obstacles, facilitating their repositioning rather than avoidance. While our preliminary visual estimation takes into account the characteristics of both the obstacle and the surface it relies on, the push affordance estimation module exploits the force feedback obtained by interacting with the obstacle via a robotic manipulator as the guidance signal. The objective of our navigation approach is to enhance the efficiency of routes utilized by multiple agents over extended periods by reducing the overall time spent by a fleet in environments where autonomous infrastructure development is imperative, such as lunar or Martian surfaces.
Analysis of the Unscented Transform for Cooperative Localization with Ranging-Only Information
Apr 09, 2025Cooperative localization in multi-agent robotic systems is challenging, especially when agents rely on limited information, such as only peer-to-peer range measurements. Two key challenges arise: utilizing this limited information to improve position estimation; handling uncertainties from sensor noise, nonlinearity, and unknown correlations between agents measurements; and avoiding information reuse. This paper examines the use of the Unscented Transform (UT) for state estimation for a case in which range measurement between agents and covariance intersection (CI) is used to handle unknown correlations. Unlike Kalman Filter approaches, CI methods fuse complete state and covariance estimates. This makes formulating a CI approach with ranging-only measurements a challenge. To overcome this, UT is used to handle uncertainties and formulate a cooperative state update using range measurements and current cooperative state estimates. This introduces information reuse in the measurement update. Therefore, this work aims to evaluate the limitations and utility of this formulation when faced with various levels of state measurement uncertainty and errors.
Evaluation of the Benefits of Zero Velocity Update in Decentralized EKF-Based Cooperative Localization Algorithms for GNSS-Denied Multi-Robot Systems
Jun 30, 2023



This paper proposes the cooperative use of zero velocity update (ZU) in a decentralized extended Kalman filter (DEKF) based localization algorithm for multi-robot systems. The filter utilizes inertial measurement unit (IMU), ultra-wideband (UWB), and odometry velocity measurements to improve the localization performance of the system in the presence of a GNSS-denied environment. The contribution of this work is to evaluate the benefits of using ZU in a DEKF-based localization algorithm. The algorithm is tested with real hardware in a video motion capture facility and a Robot Operating System (ROS) based simulation environment for unmanned ground vehicles (UGV). Both simulation and real-world experiments are performed to show the effectiveness of using ZU in one robot to reinstate the localization of other robots in a multi-robot system. Experimental results from GNSS-denied simulation and real-world environments show that using ZU with simple heuristics in the DEKF significantly improves the 3D localization accuracy.
Proprioceptive Slip Detection for Planetary Rovers in Perceptually Degraded Extraterrestrial Environments
Jul 29, 2022
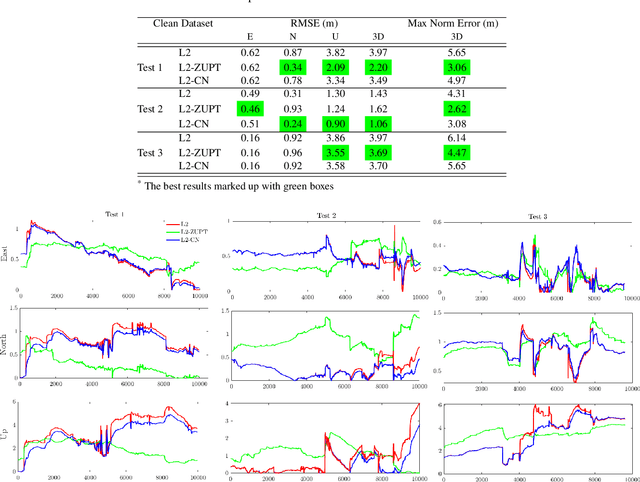
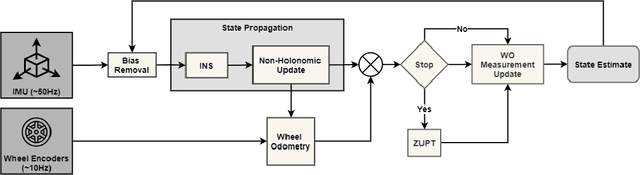
Slip detection is of fundamental importance for the safety and efficiency of rovers driving on the surface of extraterrestrial bodies. Current planetary rover slip detection systems rely on visual perception on the assumption that sufficient visual features can be acquired in the environment. However, visual-based methods are prone to suffer in perceptually degraded planetary environments with dominant low terrain features such as regolith, glacial terrain, salt-evaporites, and poor lighting conditions such as dark caves and permanently shadowed regions. Relying only on visual sensors for slip detection also requires additional computational power and reduces the rover traversal rate. This paper answers the question of how to detect wheel slippage of a planetary rover without depending on visual perception. In this respect, we propose a slip detection system that obtains its information from a proprioceptive localization framework that is capable of providing reliable, continuous, and computationally efficient state estimation over hundreds of meters. This is accomplished by using zero velocity update, zero angular rate update, and non-holonomic constraints as pseudo-measurement updates on an inertial navigation system framework. The proposed method is evaluated on actual hardware and field-tested in a planetary-analog environment. The method achieves greater than 92% slip detection accuracy for distances around 150 m using only an IMU and wheel encoders.
A Comparison of Robust Kalman Filters for Improving Wheel-Inertial Odometry in Planetary Rovers
Dec 15, 2021
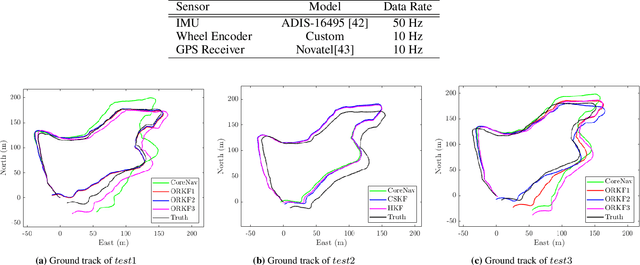
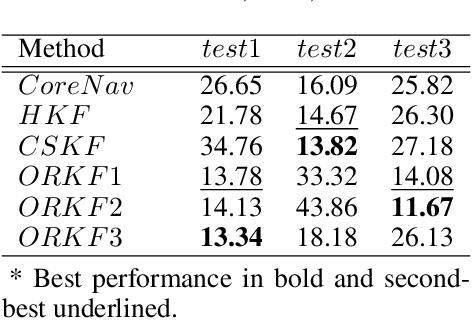
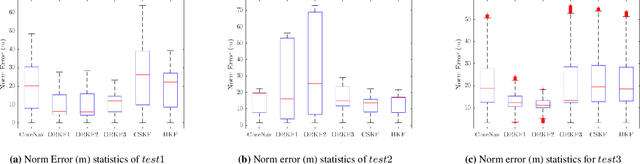
This paper compares the performance of adaptive and robust Kalman filter algorithms in improving wheel-inertial odometry on low featured rough terrain. Approaches include classical adaptive and robust methods as well as variational methods, which are evaluated experimentally on a wheeled rover in terrain similar to what would be encountered in planetary exploration. Variational filters show improved solution accuracy compared to the classical adaptive filters and are able to handle erroneous wheel odometry measurements and keep good localization for longer distances without significant drift. We also show how varying the parameters affects localization performance.
ZUPT Aided GNSS Factor Graph with Inertial Navigation Integration for Wheeled Robots
Dec 14, 2021

In this work, we demonstrate the importance of zero velocity information for global navigation satellite system (GNSS) based navigation. The effectiveness of using the zero velocity information with zero velocity update (ZUPT) for inertial navigation applications have been shown in the literature. Here we leverage this information and add it as a position constraint in a GNSS factor graph. We also compare its performance to a GNSS/inertial navigation system (INS) coupled factor graph. We tested our ZUPT aided factor graph method on three datasets and compared it with the GNSS-only factor graph.
NASA Space Robotics Challenge 2 Qualification Round: An Approach to Autonomous Lunar Rover Operations
Sep 20, 2021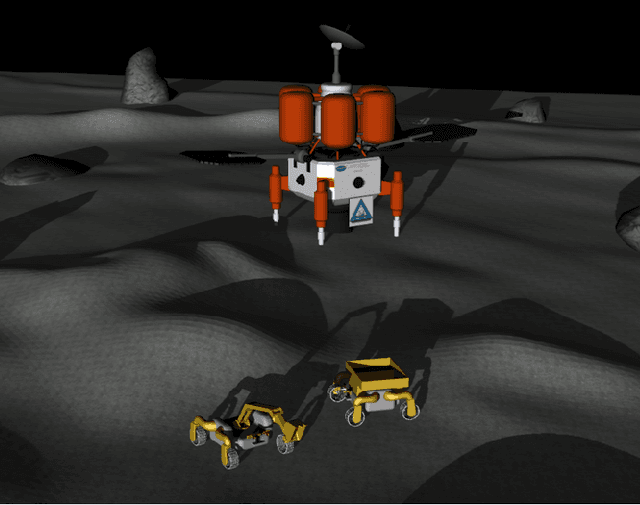
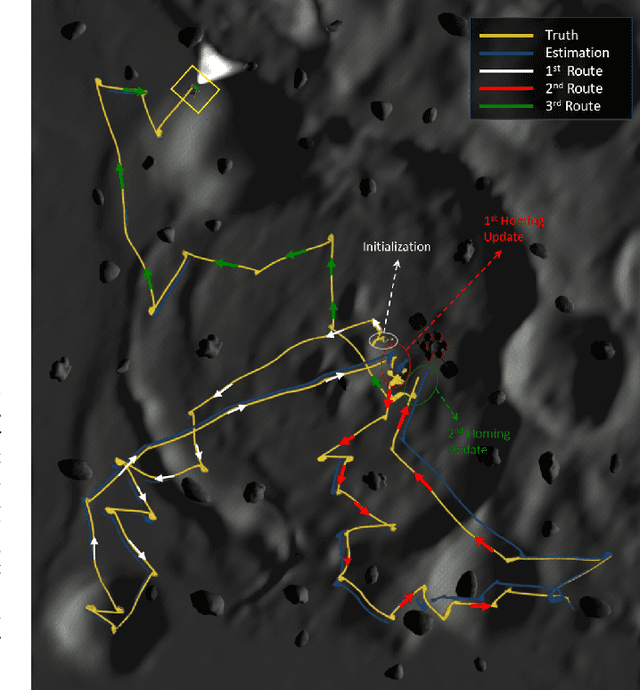
Plans for establishing a long-term human presence on the Moon will require substantial increases in robot autonomy and multi-robot coordination to support establishing a lunar outpost. To achieve these objectives, algorithm design choices for the software developments need to be tested and validated for expected scenarios such as autonomous in-situ resource utilization (ISRU), localization in challenging environments, and multi-robot coordination. However, real-world experiments are extremely challenging and limited for extraterrestrial environment. Also, realistic simulation demonstrations in these environments are still rare and demanded for initial algorithm testing capabilities. To help some of these needs, the NASA Centennial Challenges program established the Space Robotics Challenge Phase 2 (SRC2) which consist of virtual robotic systems in a realistic lunar simulation environment, where a group of mobile robots were tasked with reporting volatile locations within a global map, excavating and transporting these resources, and detecting and localizing a target of interest. The main goal of this article is to share our team's experiences on the design trade-offs to perform autonomous robotic operations in a virtual lunar environment and to share strategies to complete the mission requirements posed by NASA SRC2 competition during the qualification round. Of the 114 teams that registered for participation in the NASA SRC2, team Mountaineers finished as one of only six teams to receive the top qualification round prize.