 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThat's the Wrong Lung! Evaluating and Improving the Interpretability of Unsupervised Multimodal Encoders for Medical Data
Oct 12, 2022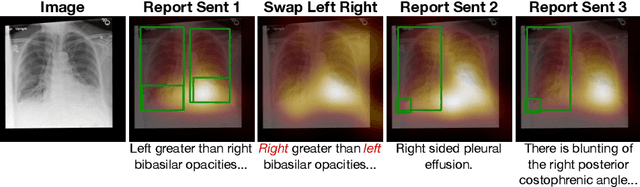
Pretraining multimodal models on Electronic Health Records (EHRs) provides a means of learning representations that can transfer to downstream tasks with minimal supervision. Recent multimodal models induce soft local alignments between image regions and sentences. This is of particular interest in the medical domain, where alignments might highlight regions in an image relevant to specific phenomena described in free-text. While past work has suggested that attention "heatmaps" can be interpreted in this manner, there has been little evaluation of such alignments. We compare alignments from a state-of-the-art multimodal (image and text) model for EHR with human annotations that link image regions to sentences. Our main finding is that the text has an often weak or unintuitive influence on attention; alignments do not consistently reflect basic anatomical information. Moreover, synthetic modifications -- such as substituting "left" for "right" -- do not substantially influence highlights. Simple techniques such as allowing the model to opt out of attending to the image and few-shot finetuning show promise in terms of their ability to improve alignments with very little or no supervision.
Deriving time-averaged active inference from control principles
Aug 22, 2022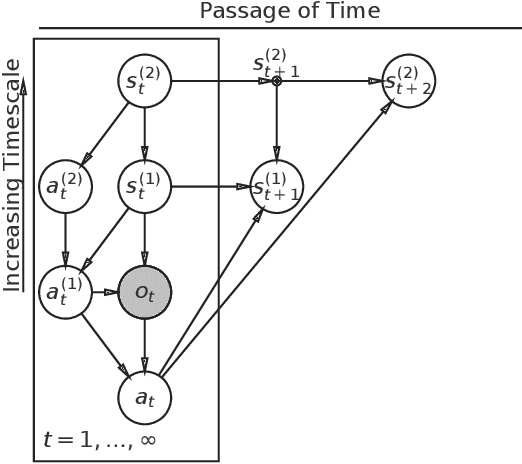
Active inference offers a principled account of behavior as minimizing average sensory surprise over time. Applications of active inference to control problems have heretofore tended to focus on finite-horizon or discounted-surprise problems, despite deriving from the infinite-horizon, average-surprise imperative of the free-energy principle. Here we derive an infinite-horizon, average-surprise formulation of active inference from optimal control principles. Our formulation returns to the roots of active inference in neuroanatomy and neurophysiology, formally reconnecting active inference to optimal feedback control. Our formulation provides a unified objective functional for sensorimotor control and allows for reference states to vary over time.
Binding Actions to Objects in World Models
Apr 27, 2022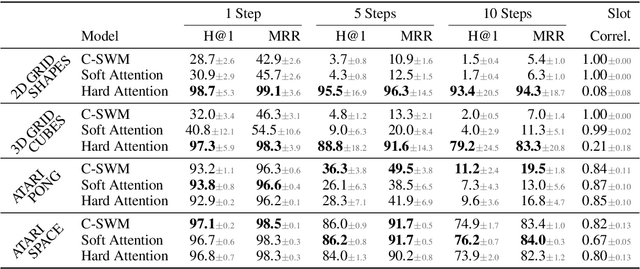
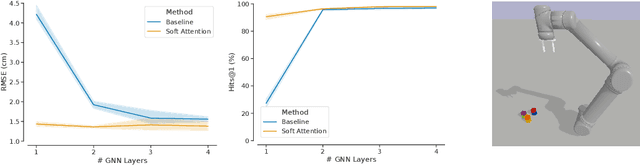
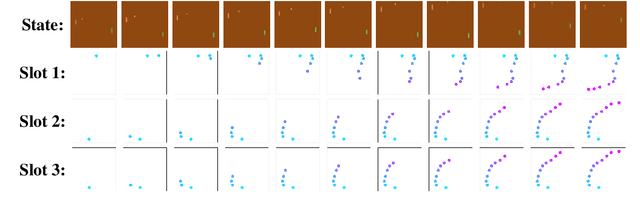
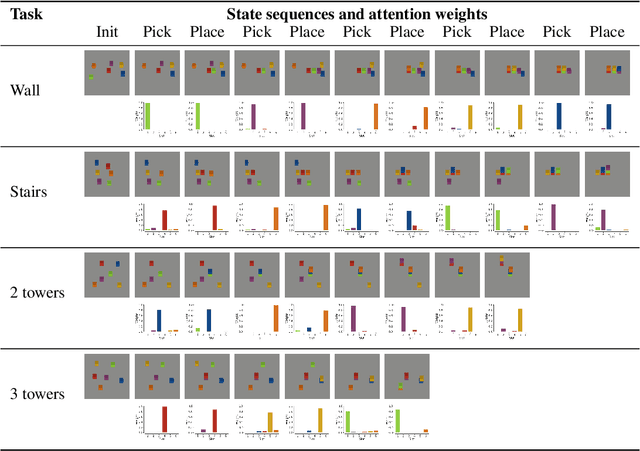
We study the problem of binding actions to objects in object-factored world models using action-attention mechanisms. We propose two attention mechanisms for binding actions to objects, soft attention and hard attention, which we evaluate in the context of structured world models for five environments. Our experiments show that hard attention helps contrastively-trained structured world models to learn to separate individual objects in an object-based grid-world environment. Further, we show that soft attention increases performance of factored world models trained on a robotic manipulation task. The learned action attention weights can be used to interpret the factored world model as the attention focuses on the manipulated object in the environment.
Factored World Models for Zero-Shot Generalization in Robotic Manipulation
Feb 10, 2022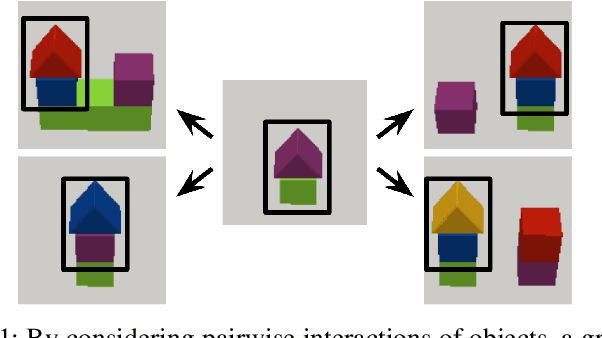
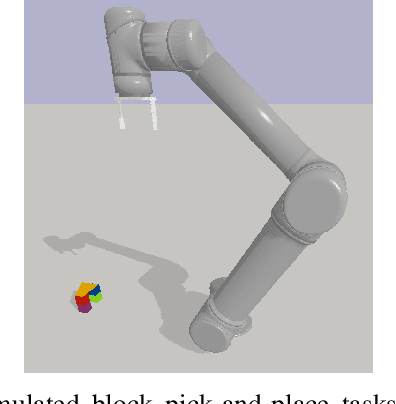
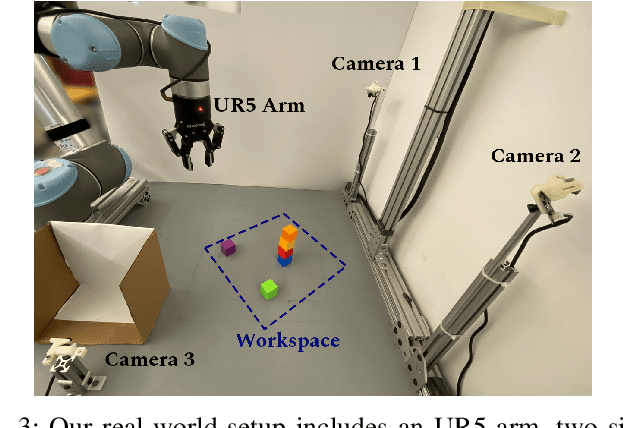
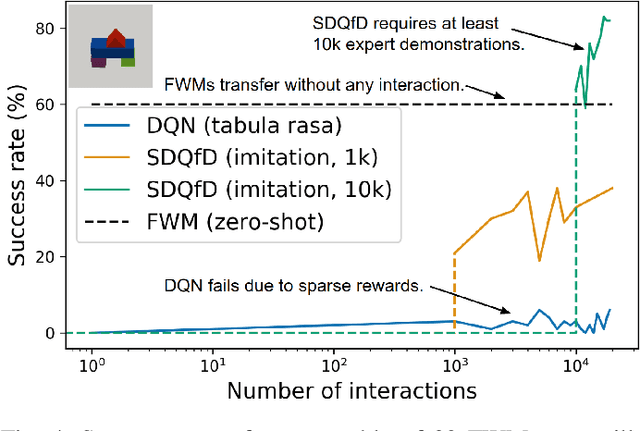
World models for environments with many objects face a combinatorial explosion of states: as the number of objects increases, the number of possible arrangements grows exponentially. In this paper, we learn to generalize over robotic pick-and-place tasks using object-factored world models, which combat the combinatorial explosion by ensuring that predictions are equivariant to permutations of objects. Previous object-factored models were limited either by their inability to model actions, or by their inability to plan for complex manipulation tasks. We build on recent contrastive methods for training object-factored world models, which we extend to model continuous robot actions and to accurately predict the physics of robotic pick-and-place. To do so, we use a residual stack of graph neural networks that receive action information at multiple levels in both their node and edge neural networks. Crucially, our learned model can make predictions about tasks not represented in the training data. That is, we demonstrate successful zero-shot generalization to novel tasks, with only a minor decrease in model performance. Moreover, we show that an ensemble of our models can be used to plan for tasks involving up to 12 pick and place actions using heuristic search. We also demonstrate transfer to a physical robot.
Beyond Simple Meta-Learning: Multi-Purpose Models for Multi-Domain, Active and Continual Few-Shot Learning
Jan 13, 2022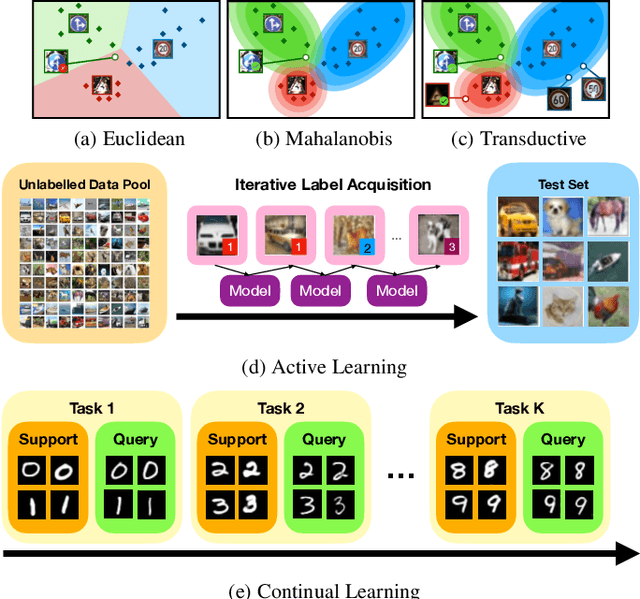
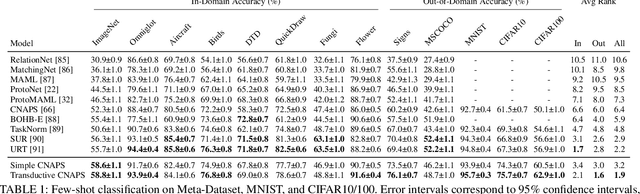
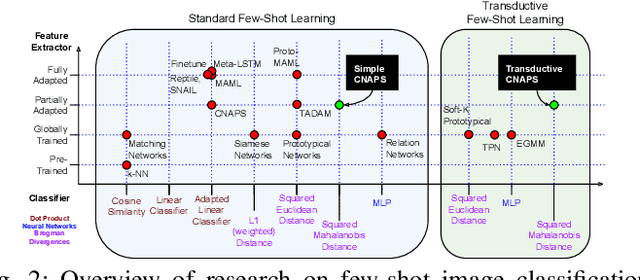
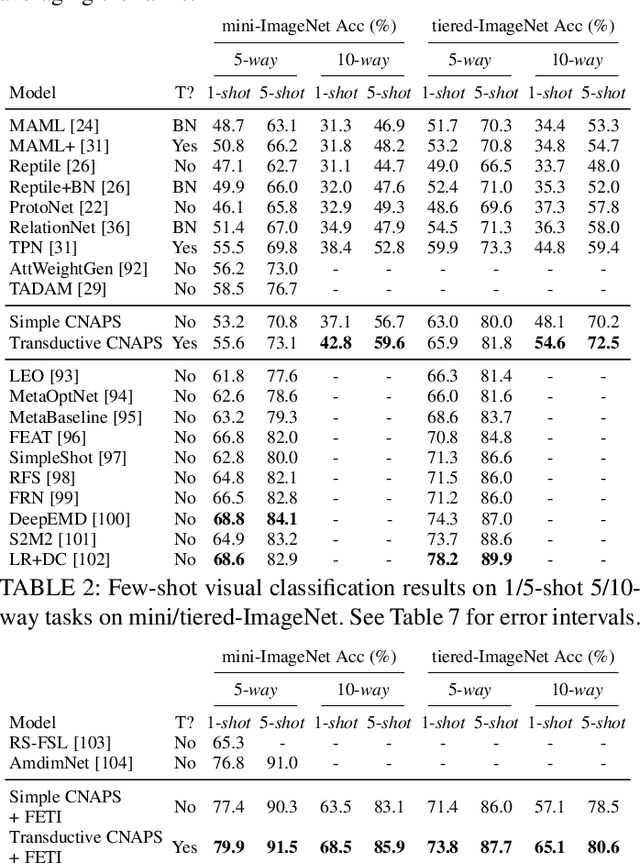
Modern deep learning requires large-scale extensively labelled datasets for training. Few-shot learning aims to alleviate this issue by learning effectively from few labelled examples. In previously proposed few-shot visual classifiers, it is assumed that the feature manifold, where classifier decisions are made, has uncorrelated feature dimensions and uniform feature variance. In this work, we focus on addressing the limitations arising from this assumption by proposing a variance-sensitive class of models that operates in a low-label regime. The first method, Simple CNAPS, employs a hierarchically regularized Mahalanobis-distance based classifier combined with a state of the art neural adaptive feature extractor to achieve strong performance on Meta-Dataset, mini-ImageNet and tiered-ImageNet benchmarks. We further extend this approach to a transductive learning setting, proposing Transductive CNAPS. This transductive method combines a soft k-means parameter refinement procedure with a two-step task encoder to achieve improved test-time classification accuracy using unlabelled data. Transductive CNAPS achieves state of the art performance on Meta-Dataset. Finally, we explore the use of our methods (Simple and Transductive) for "out of the box" continual and active learning. Extensive experiments on large scale benchmarks illustrate robustness and versatility of this, relatively speaking, simple class of models. All trained model checkpoints and corresponding source codes have been made publicly available.
Conjugate Energy-Based Models
Jun 25, 2021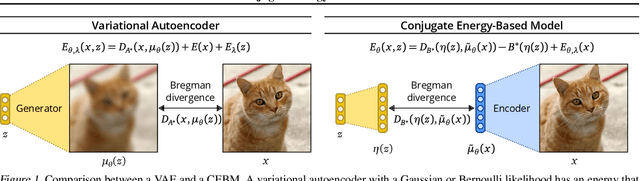
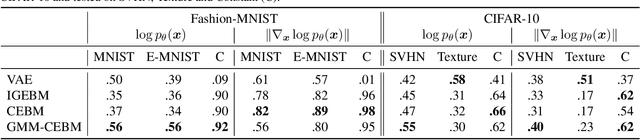
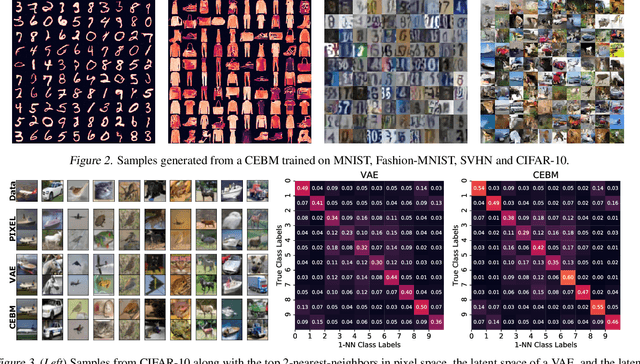
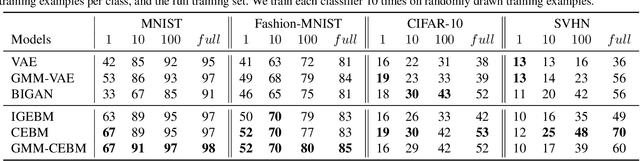
In this paper, we propose conjugate energy-based models (CEBMs), a new class of energy-based models that define a joint density over data and latent variables. The joint density of a CEBM decomposes into an intractable distribution over data and a tractable posterior over latent variables. CEBMs have similar use cases as variational autoencoders, in the sense that they learn an unsupervised mapping from data to latent variables. However, these models omit a generator network, which allows them to learn more flexible notions of similarity between data points. Our experiments demonstrate that conjugate EBMs achieve competitive results in terms of image modelling, predictive power of latent space, and out-of-domain detection on a variety of datasets.
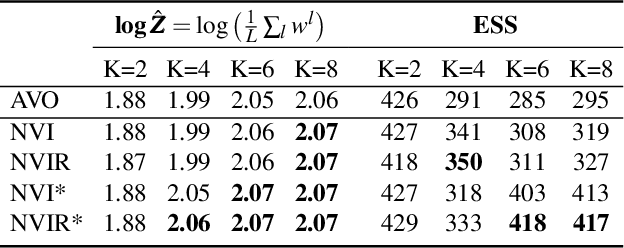
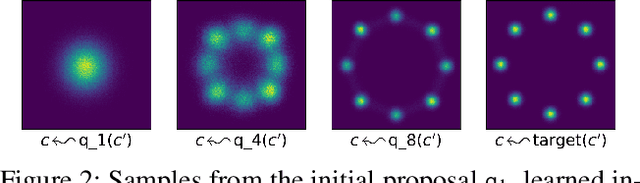
Nested Variational Inference
Jun 21, 2021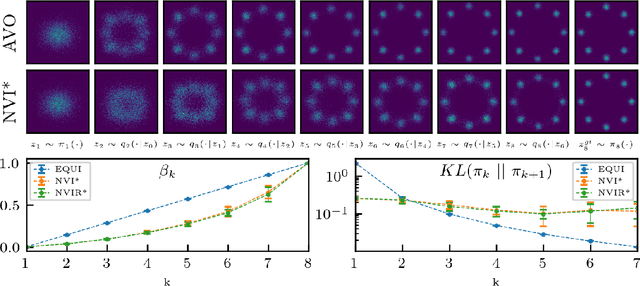

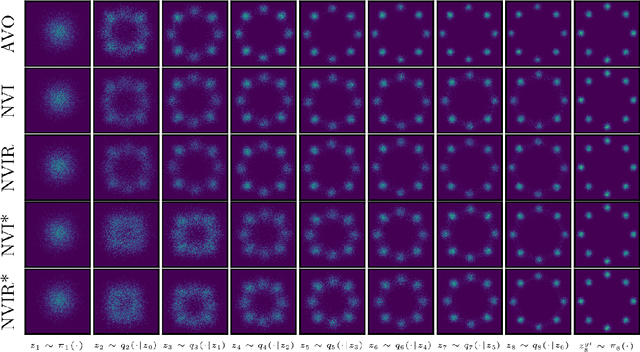
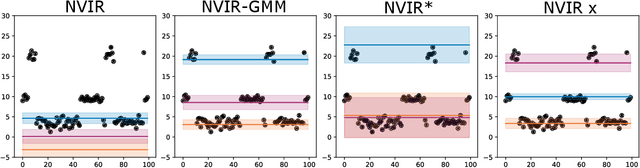
We develop nested variational inference (NVI), a family of methods that learn proposals for nested importance samplers by minimizing an forward or reverse KL divergence at each level of nesting. NVI is applicable to many commonly-used importance sampling strategies and provides a mechanism for learning intermediate densities, which can serve as heuristics to guide the sampler. Our experiments apply NVI to (a) sample from a multimodal distribution using a learned annealing path (b) learn heuristics that approximate the likelihood of future observations in a hidden Markov model and (c) to perform amortized inference in hierarchical deep generative models. We observe that optimizing nested objectives leads to improved sample quality in terms of log average weight and effective sample size.
Disentangling Representations of Text by Masking Transformers
Apr 14, 2021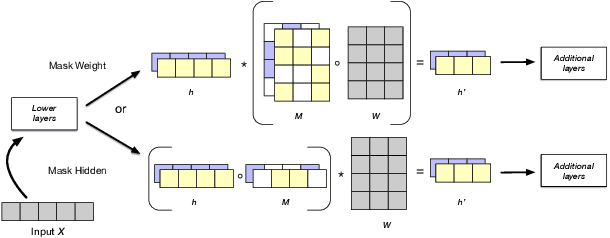
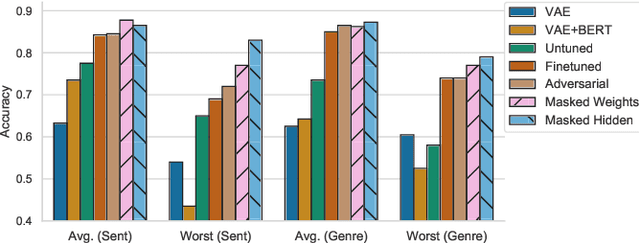
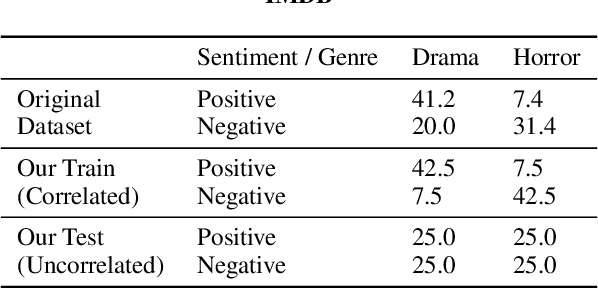
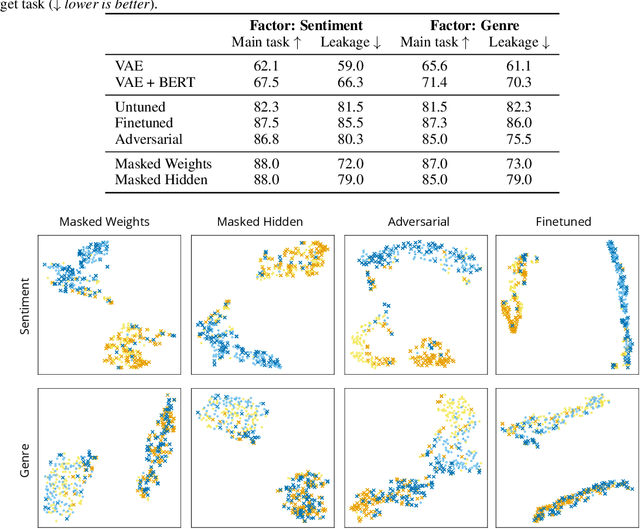
Representations from large pretrained models such as BERT encode a range of features into monolithic vectors, affording strong predictive accuracy across a multitude of downstream tasks. In this paper we explore whether it is possible to learn disentangled representations by identifying existing subnetworks within pretrained models that encode distinct, complementary aspect representations. Concretely, we learn binary masks over transformer weights or hidden units to uncover subsets of features that correlate with a specific factor of variation; this eliminates the need to train a disentangled model from scratch for a particular task. We evaluate this method with respect to its ability to disentangle representations of sentiment from genre in movie reviews, "toxicity" from dialect in Tweets, and syntax from semantics. By combining masking with magnitude pruning we find that we can identify sparse subnetworks within BERT that strongly encode particular aspects (e.g., toxicity) while only weakly encoding others (e.g., race). Moreover, despite only learning masks, we find that disentanglement-via-masking performs as well as -- and often better than -- previously proposed methods based on variational autoencoders and adversarial training.
On the Impact of Random Seeds on the Fairness of Clinical Classifiers
Apr 13, 2021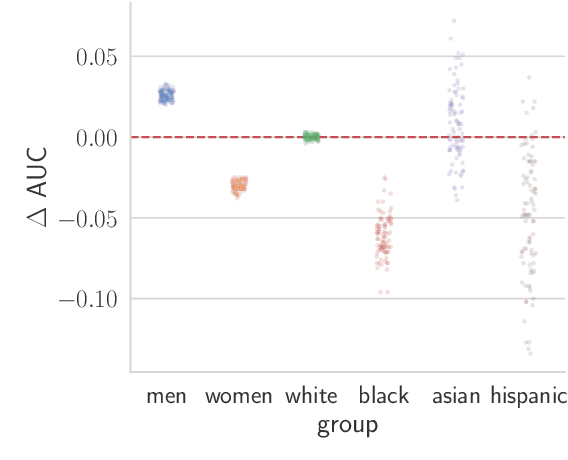
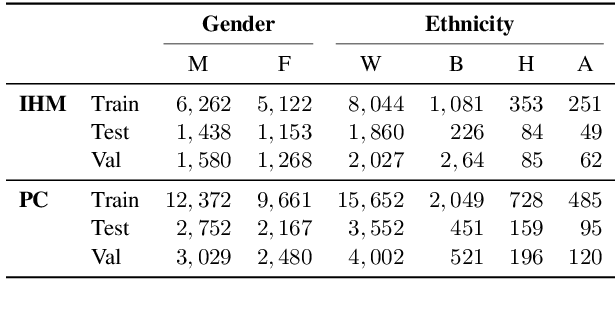
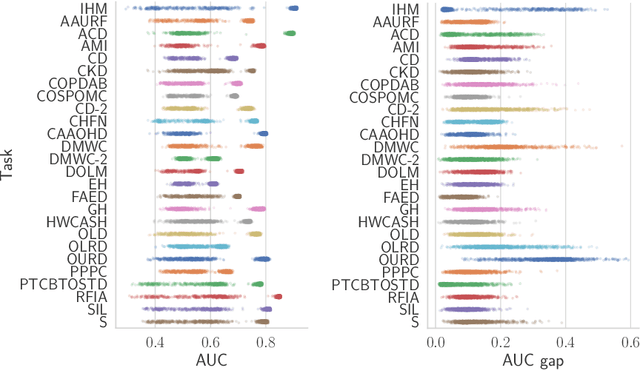
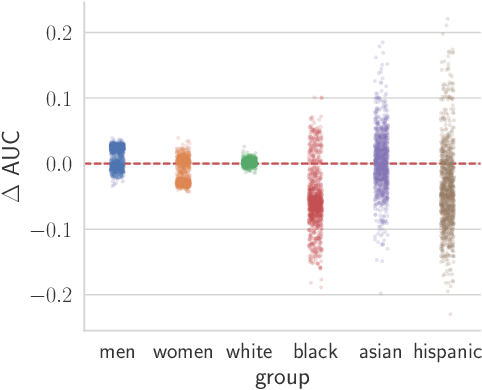
Recent work has shown that fine-tuning large networks is surprisingly sensitive to changes in random seed(s). We explore the implications of this phenomenon for model fairness across demographic groups in clinical prediction tasks over electronic health records (EHR) in MIMIC-III -- the standard dataset in clinical NLP research. Apparent subgroup performance varies substantially for seeds that yield similar overall performance, although there is no evidence of a trade-off between overall and subgroup performance. However, we also find that the small sample sizes inherent to looking at intersections of minority groups and somewhat rare conditions limit our ability to accurately estimate disparities. Further, we find that jointly optimizing for high overall performance and low disparities does not yield statistically significant improvements. Our results suggest that fairness work using MIMIC-III should carefully account for variations in apparent differences that may arise from stochasticity and small sample sizes.
Learning Proposals for Probabilistic Programs with Inference Combinators
Mar 03, 2021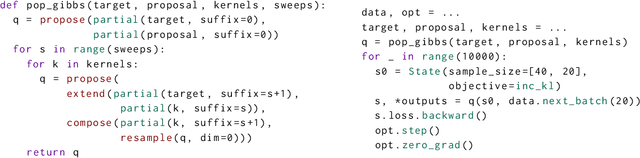
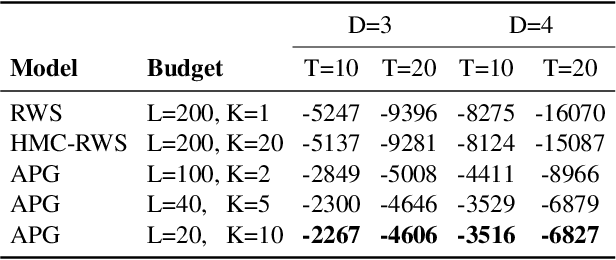
We develop operators for construction of proposals in probabilistic programs, which we refer to as inference combinators. Inference combinators define a grammar over importance samplers that compose primitive operations such as application of a transition kernel and importance resampling. Proposals in these samplers can be parameterized using neural networks, which in turn can be trained by optimizing variational objectives. The result is a framework for user-programmable variational methods that are correct by construction and can be tailored to specific models. We demonstrate the flexibility of this framework by implementing advanced variational methods based on amortized Gibbs sampling and annealing.