 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Empirical Analysis of Measure-Valued Derivatives for Policy Gradients
Jul 20, 2021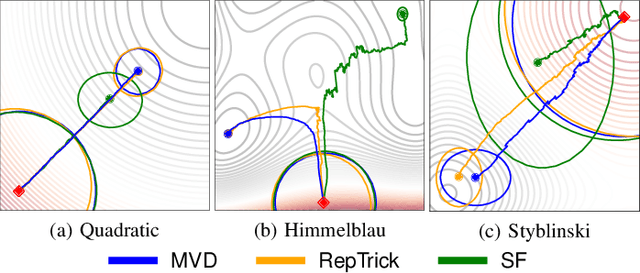
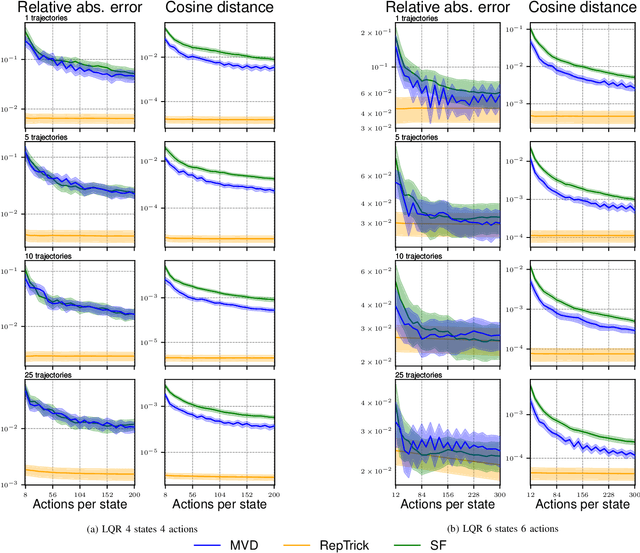
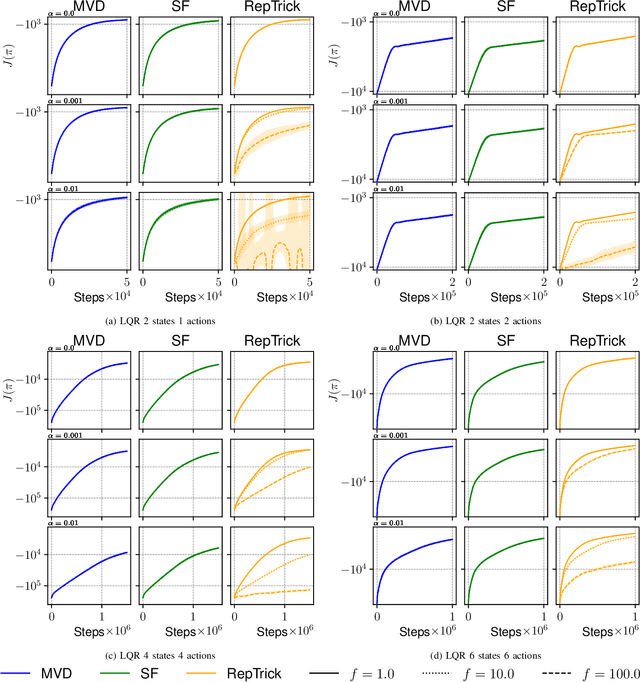
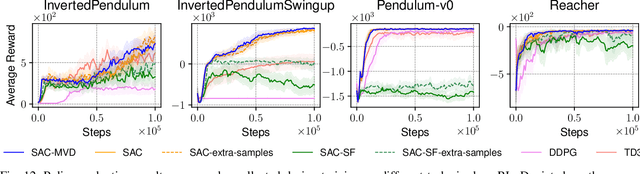
Reinforcement learning methods for robotics are increasingly successful due to the constant development of better policy gradient techniques. A precise (low variance) and accurate (low bias) gradient estimator is crucial to face increasingly complex tasks. Traditional policy gradient algorithms use the likelihood-ratio trick, which is known to produce unbiased but high variance estimates. More modern approaches exploit the reparametrization trick, which gives lower variance gradient estimates but requires differentiable value function approximators. In this work, we study a different type of stochastic gradient estimator: the Measure-Valued Derivative. This estimator is unbiased, has low variance, and can be used with differentiable and non-differentiable function approximators. We empirically evaluate this estimator in the actor-critic policy gradient setting and show that it can reach comparable performance with methods based on the likelihood-ratio or reparametrization tricks, both in low and high-dimensional action spaces.
Efficient and Reactive Planning for High Speed Robot Air Hockey
Jul 14, 2021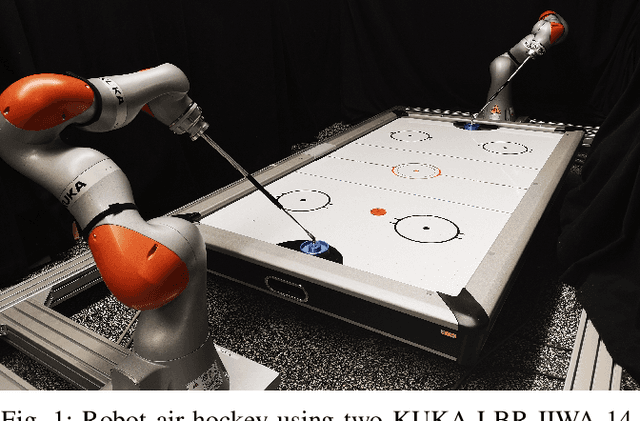
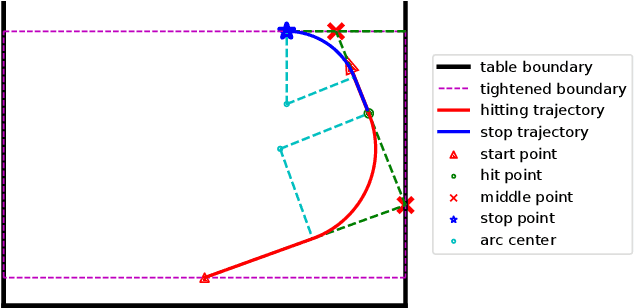
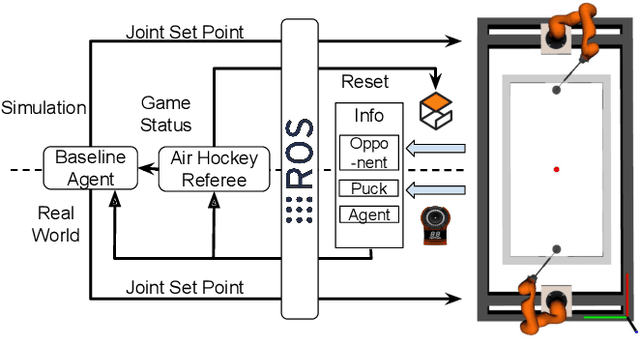

Highly dynamic robotic tasks require high-speed and reactive robots. These tasks are particularly challenging due to the physical constraints, hardware limitations, and the high uncertainty of dynamics and sensor measures. To face these issues, it's crucial to design robotics agents that generate precise and fast trajectories and react immediately to environmental changes. Air hockey is an example of this kind of task. Due to the environment's characteristics, it is possible to formalize the problem and derive clean mathematical solutions. For these reasons, this environment is perfect for pushing to the limit the performance of currently available general-purpose robotic manipulators. Using two Kuka Iiwa 14, we show how to design a policy for general-purpose robotic manipulators for the air hockey game. We demonstrate that a real robot arm can perform fast-hitting movements and that the two robots can play against each other on a medium-size air hockey table in simulation.
High-Dimensional Bayesian Optimisation with Variational Autoencoders and Deep Metric Learning
Jun 16, 2021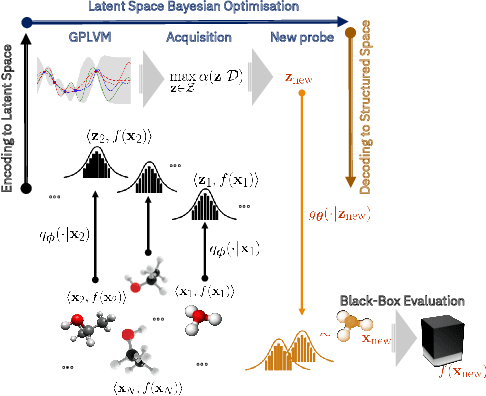

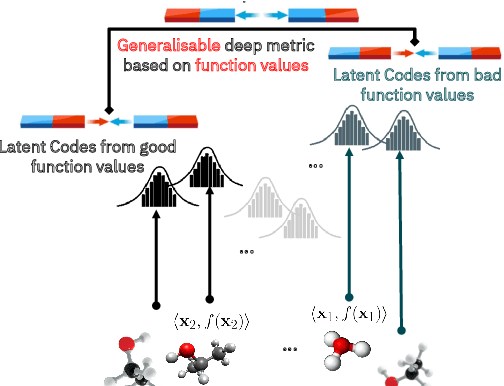
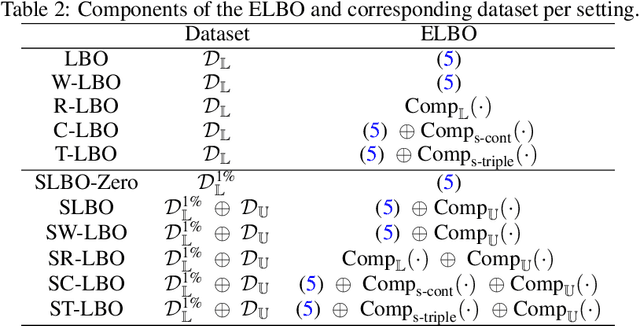
We introduce a method based on deep metric learning to perform Bayesian optimisation over high-dimensional, structured input spaces using variational autoencoders (VAEs). By extending ideas from supervised deep metric learning, we address a longstanding problem in high-dimensional VAE Bayesian optimisation, namely how to enforce a discriminative latent space as an inductive bias. Importantly, we achieve such an inductive bias using just 1% of the available labelled data relative to previous work, highlighting the sample efficiency of our approach. As a theoretical contribution, we present a proof of vanishing regret for our method. As an empirical contribution, we present state-of-the-art results on real-world high-dimensional black-box optimisation problems including property-guided molecule generation. It is the hope that the results presented in this paper can act as a guiding principle for realising effective high-dimensional Bayesian optimisation.
Robust Value Iteration for Continuous Control Tasks
May 25, 2021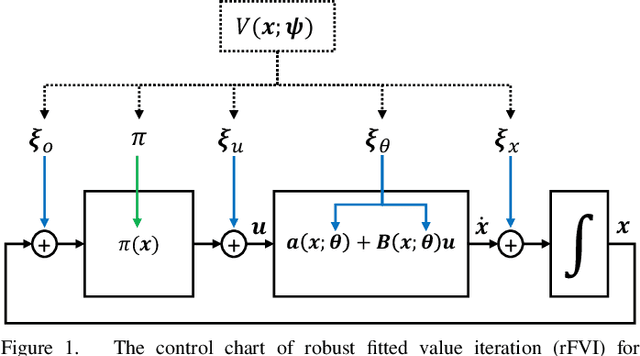
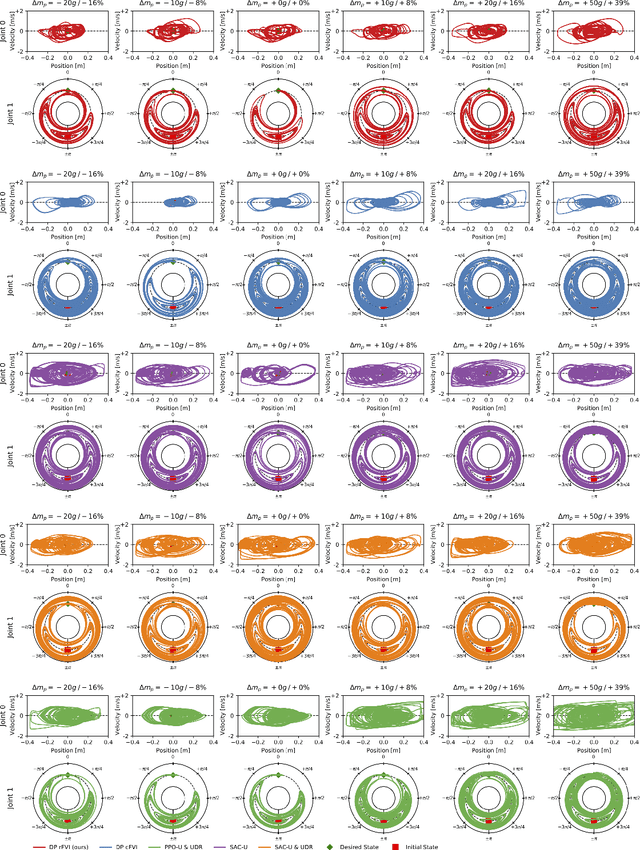
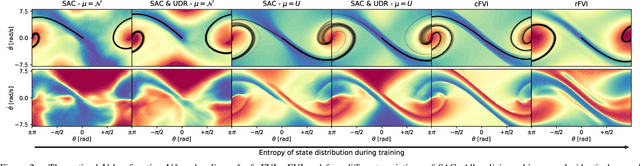

When transferring a control policy from simulation to a physical system, the policy needs to be robust to variations in the dynamics to perform well. Commonly, the optimal policy overfits to the approximate model and the corresponding state-distribution, often resulting in failure to trasnfer underlying distributional shifts. In this paper, we present Robust Fitted Value Iteration, which uses dynamic programming to compute the optimal value function on the compact state domain and incorporates adversarial perturbations of the system dynamics. The adversarial perturbations encourage a optimal policy that is robust to changes in the dynamics. Utilizing the continuous-time perspective of reinforcement learning, we derive the optimal perturbations for the states, actions, observations and model parameters in closed-form. Notably, the resulting algorithm does not require discretization of states or actions. Therefore, the optimal adversarial perturbations can be efficiently incorporated in the min-max value function update. We apply the resulting algorithm to the physical Furuta pendulum and cartpole. By changing the masses of the systems we evaluate the quantitative and qualitative performance across different model parameters. We show that robust value iteration is more robust compared to deep reinforcement learning algorithm and the non-robust version of the algorithm. Videos of the experiments are shown at https://sites.google.com/view/rfvi
Evolutionary Training and Abstraction Yields Algorithmic Generalization of Neural Computers
May 17, 2021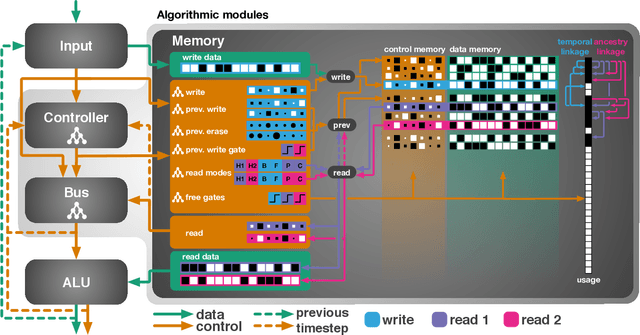
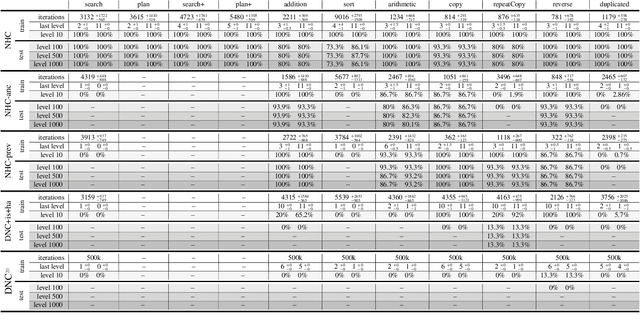
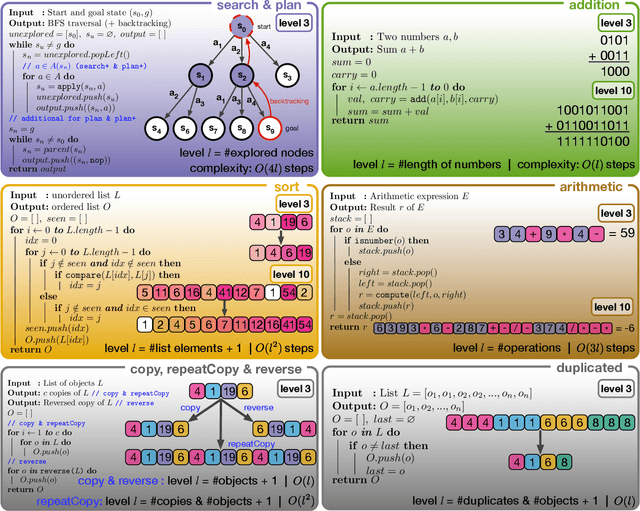
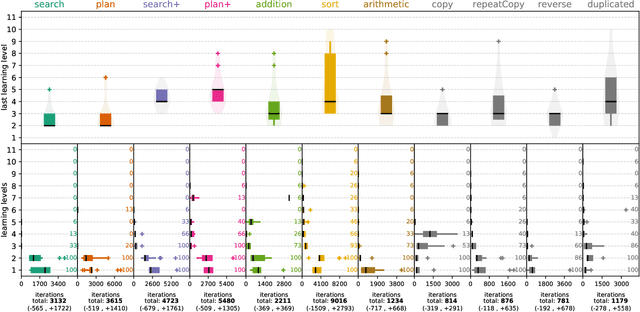
A key feature of intelligent behaviour is the ability to learn abstract strategies that scale and transfer to unfamiliar problems. An abstract strategy solves every sample from a problem class, no matter its representation or complexity -- like algorithms in computer science. Neural networks are powerful models for processing sensory data, discovering hidden patterns, and learning complex functions, but they struggle to learn such iterative, sequential or hierarchical algorithmic strategies. Extending neural networks with external memories has increased their capacities in learning such strategies, but they are still prone to data variations, struggle to learn scalable and transferable solutions, and require massive training data. We present the Neural Harvard Computer (NHC), a memory-augmented network based architecture, that employs abstraction by decoupling algorithmic operations from data manipulations, realized by splitting the information flow and separated modules. This abstraction mechanism and evolutionary training enable the learning of robust and scalable algorithmic solutions. On a diverse set of 11 algorithms with varying complexities, we show that the NHC reliably learns algorithmic solutions with strong generalization and abstraction: perfect generalization and scaling to arbitrary task configurations and complexities far beyond seen during training, and being independent of the data representation and the task domain.
* Nature Machine Intelligence
Stochastic Control through Approximate Bayesian Input Inference
May 17, 2021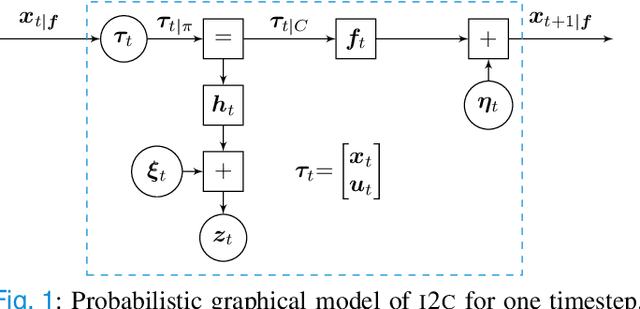
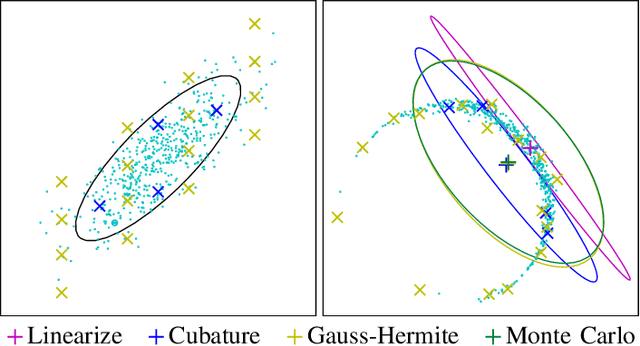
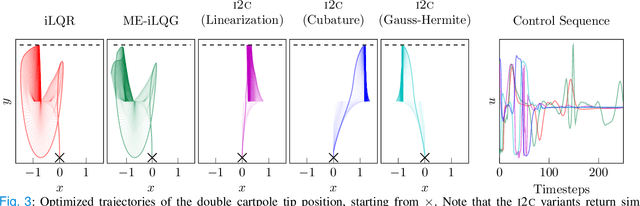
Optimal control under uncertainty is a prevailing challenge in control, due to the difficulty in producing tractable solutions for the stochastic optimization problem. By framing the control problem as one of input estimation, advanced approximate inference techniques can be used to handle the statistical approximations in a principled and practical manner. Analyzing the Gaussian setting, we present a solver capable of several stochastic control methods, and was found to be superior to popular baselines on nonlinear simulated tasks. We draw connections that relate this inference formulation to previous approaches for stochastic optimal control, and outline several advantages that this inference view brings due to its statistical nature.
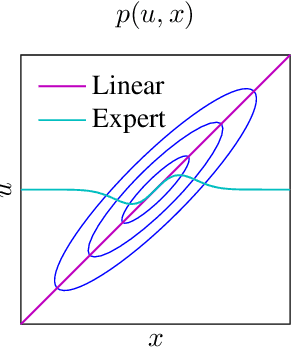
Composable Energy Policies for Reactive Motion Generation and Reinforcement Learning
May 11, 2021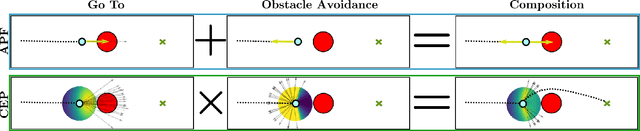
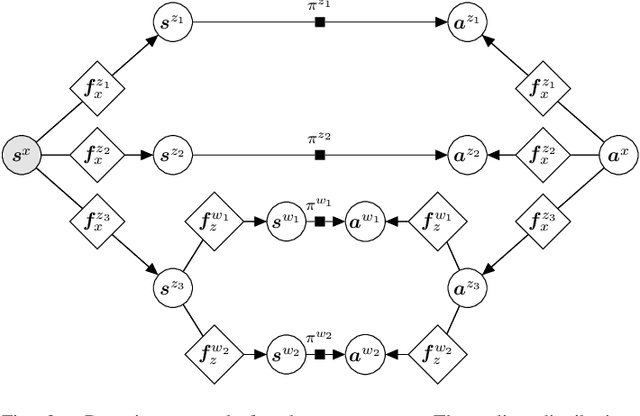
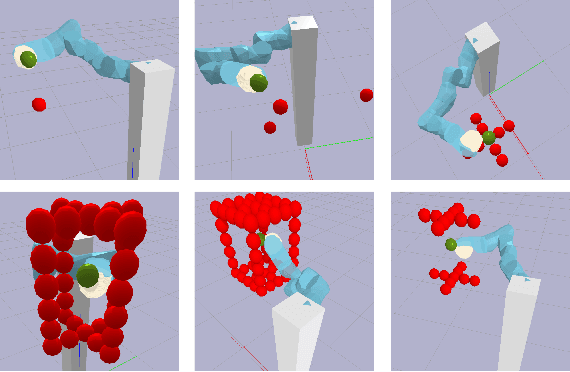
Reactive motion generation problems are usually solved by computing actions as a sum of policies. However, these policies are independent of each other and thus, they can have conflicting behaviors when summing their contributions together. We introduce Composable Energy Policies (CEP), a novel framework for modular reactive motion generation. CEP computes the control action by optimization over the product of a set of stochastic policies. This product of policies will provide a high probability to those actions that satisfy all the components and low probability to the others. Optimizing over the product of the policies avoids the detrimental effect of conflicting behaviors between policies choosing an action that satisfies all the objectives. Besides, we show that CEP naturally adapts to the Reinforcement Learning problem allowing us to integrate, in a hierarchical fashion, any distribution as prior, from multimodal distributions to non-smooth distributions and learn a new policy given them.
Value Iteration in Continuous Actions, States and Time
May 10, 2021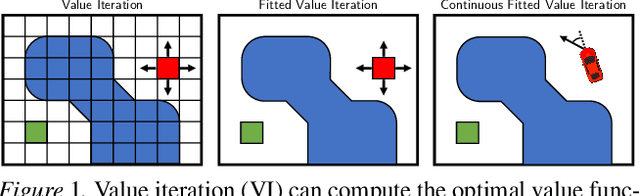
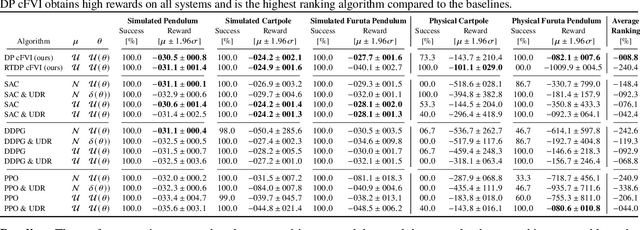
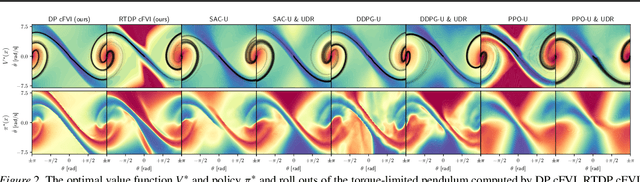
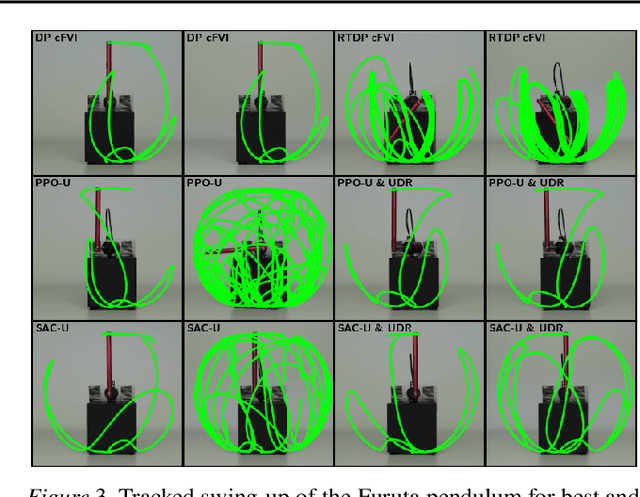
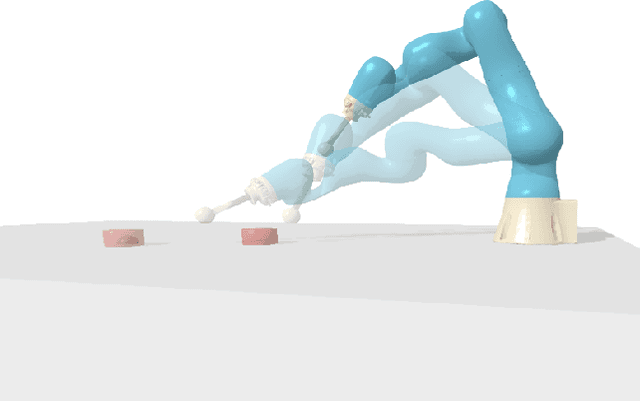
Classical value iteration approaches are not applicable to environments with continuous states and actions. For such environments, the states and actions are usually discretized, which leads to an exponential increase in computational complexity. In this paper, we propose continuous fitted value iteration (cFVI). This algorithm enables dynamic programming for continuous states and actions with a known dynamics model. Leveraging the continuous-time formulation, the optimal policy can be derived for non-linear control-affine dynamics. This closed-form solution enables the efficient extension of value iteration to continuous environments. We show in non-linear control experiments that the dynamic programming solution obtains the same quantitative performance as deep reinforcement learning methods in simulation but excels when transferred to the physical system. The policy obtained by cFVI is more robust to changes in the dynamics despite using only a deterministic model and without explicitly incorporating robustness in the optimization. Videos of the physical system are available at \url{https://sites.google.com/view/value-iteration}.
Benchmarking Structured Policies and Policy Optimization for Real-World Dexterous Object Manipulation
May 05, 2021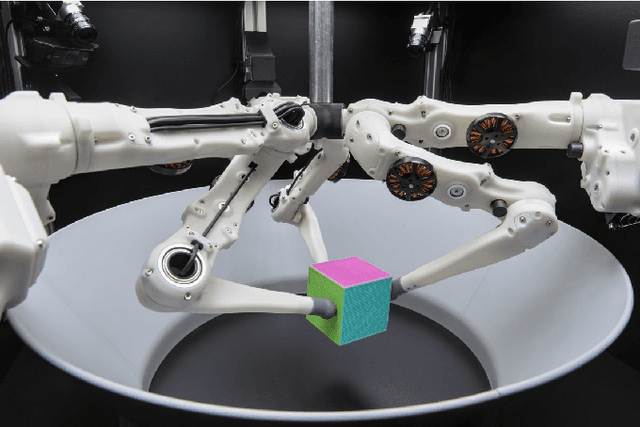
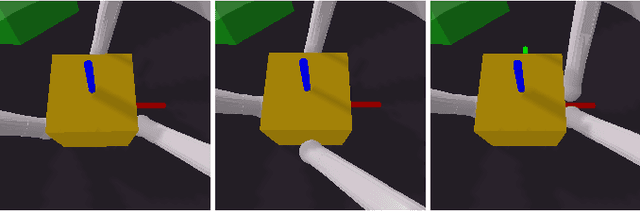
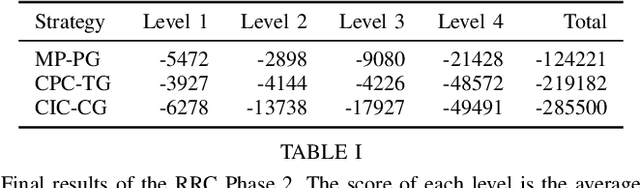
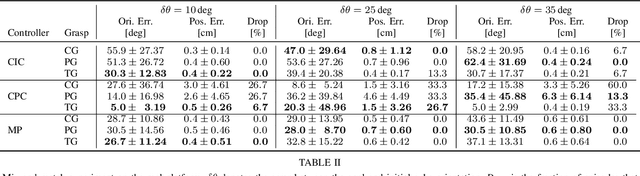
Dexterous manipulation is a challenging and important problem in robotics. While data-driven methods are a promising approach, current benchmarks require simulation or extensive engineering support due to the sample inefficiency of popular methods. We present benchmarks for the TriFinger system, an open-source robotic platform for dexterous manipulation and the focus of the 2020 Real Robot Challenge. The benchmarked methods, which were successful in the challenge, can be generally described as structured policies, as they combine elements of classical robotics and modern policy optimization. This inclusion of inductive biases facilitates sample efficiency, interpretability, reliability and high performance. The key aspects of this benchmarking is validation of the baselines across both simulation and the real system, thorough ablation study over the core features of each solution, and a retrospective analysis of the challenge as a manipulation benchmark. The code and demo videos for this work can be found on our website (https://sites.google.com/view/benchmark-rrc).
Reinforcement Learning using Guided Observability
Apr 22, 2021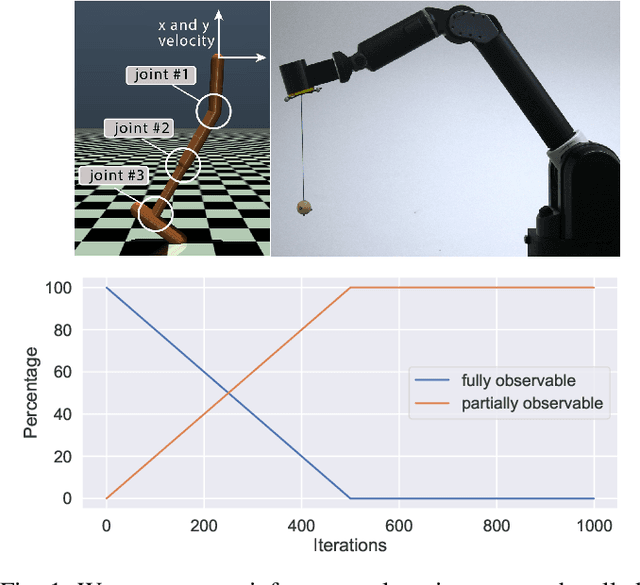

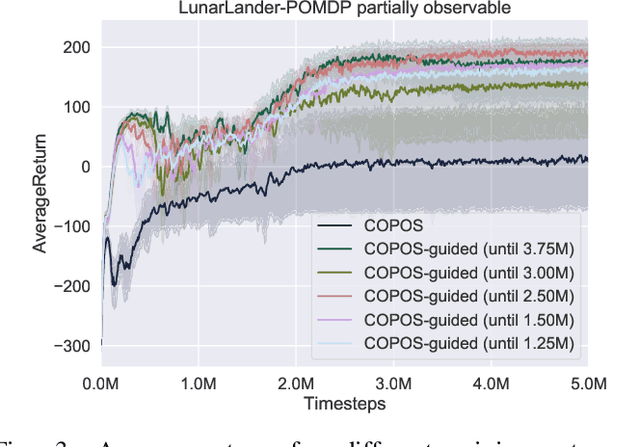
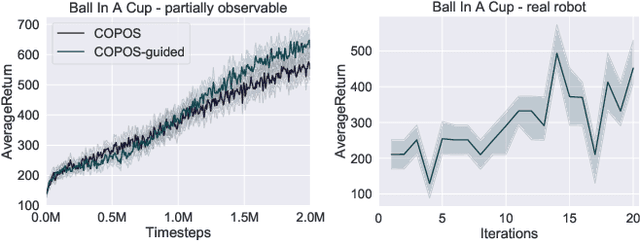
Due to recent breakthroughs, reinforcement learning (RL) has demonstrated impressive performance in challenging sequential decision-making problems. However, an open question is how to make RL cope with partial observability which is prevalent in many real-world problems. Contrary to contemporary RL approaches, which focus mostly on improved memory representations or strong assumptions about the type of partial observability, we propose a simple but efficient approach that can be applied together with a wide variety of RL methods. Our main insight is that smoothly transitioning from full observability to partial observability during the training process yields a high performance policy. The approach, called partially observable guided reinforcement learning (PO-GRL), allows to utilize full state information during policy optimization without compromising the optimality of the final policy. A comprehensive evaluation in discrete partially observableMarkov decision process (POMDP) benchmark problems and continuous partially observable MuJoCo and OpenAI gym tasks shows that PO-GRL improves performance. Finally, we demonstrate PO-GRL in the ball-in-the-cup task on a real Barrett WAM robot under partial observability.