 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIan D. Miller
PST900: RGB-Thermal Calibration, Dataset and Segmentation Network
Sep 20, 2019
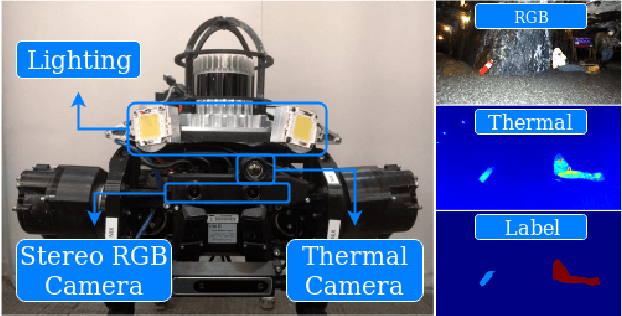
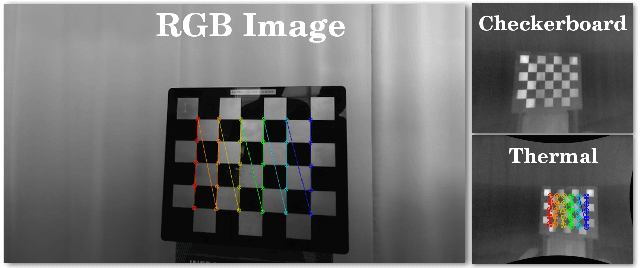
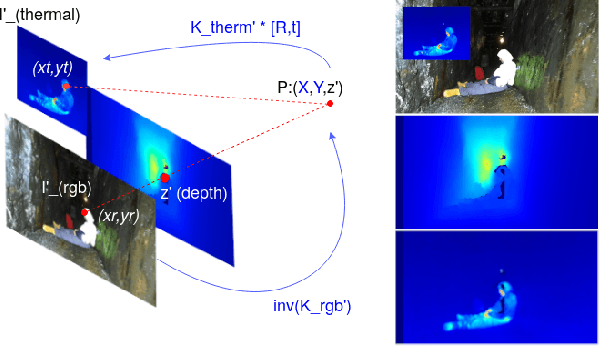
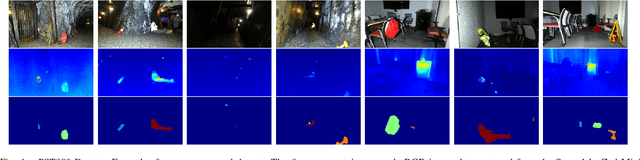
In this work we propose long wave infrared (LWIR) imagery as a viable supporting modality for semantic segmentation using learning-based techniques. We first address the problem of RGB-thermal camera calibration by proposing a passive calibration target and procedure that is both portable and easy to use. Second, we present PST900, a dataset of 894 synchronized and calibrated RGB and Thermal image pairs with per pixel human annotations across four distinct classes from the DARPA Subterranean Challenge. Lastly, we propose a CNN architecture for fast semantic segmentation that combines both RGB and Thermal imagery in a way that leverages RGB imagery independently. We compare our method against the state-of-the-art and show that our method outperforms them in our dataset.
DFineNet: Ego-Motion Estimation and Depth Refinement from Sparse, Noisy Depth Input with RGB Guidance
Apr 10, 2019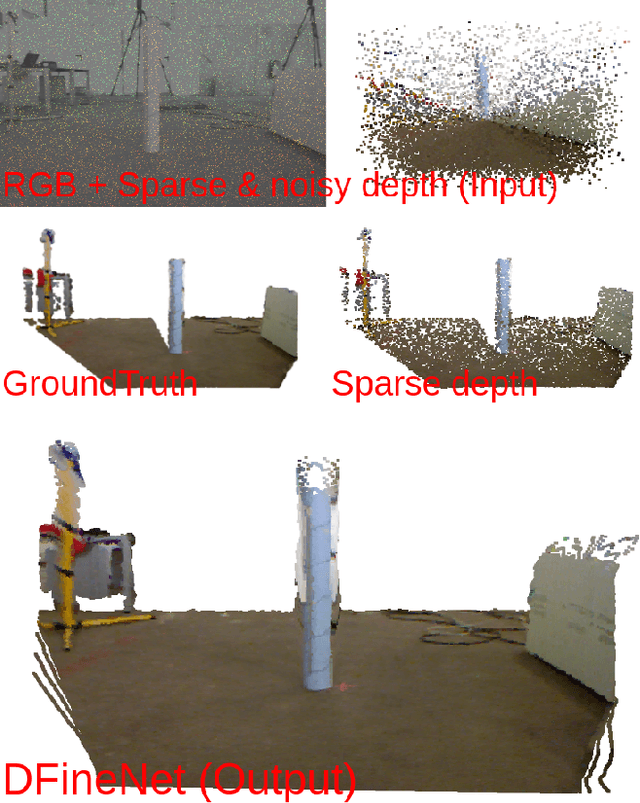
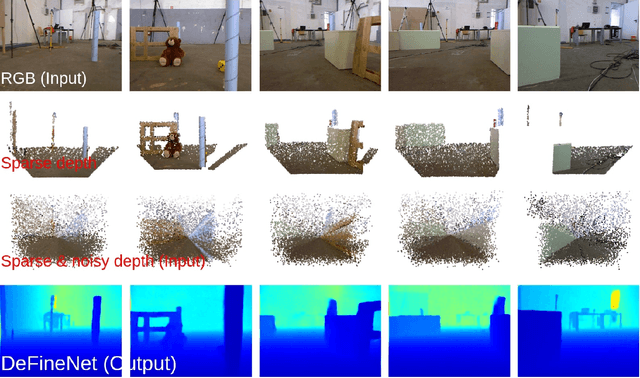
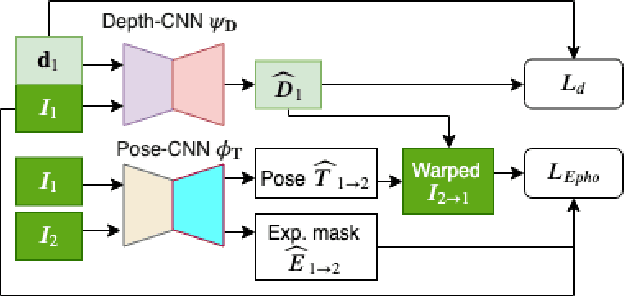
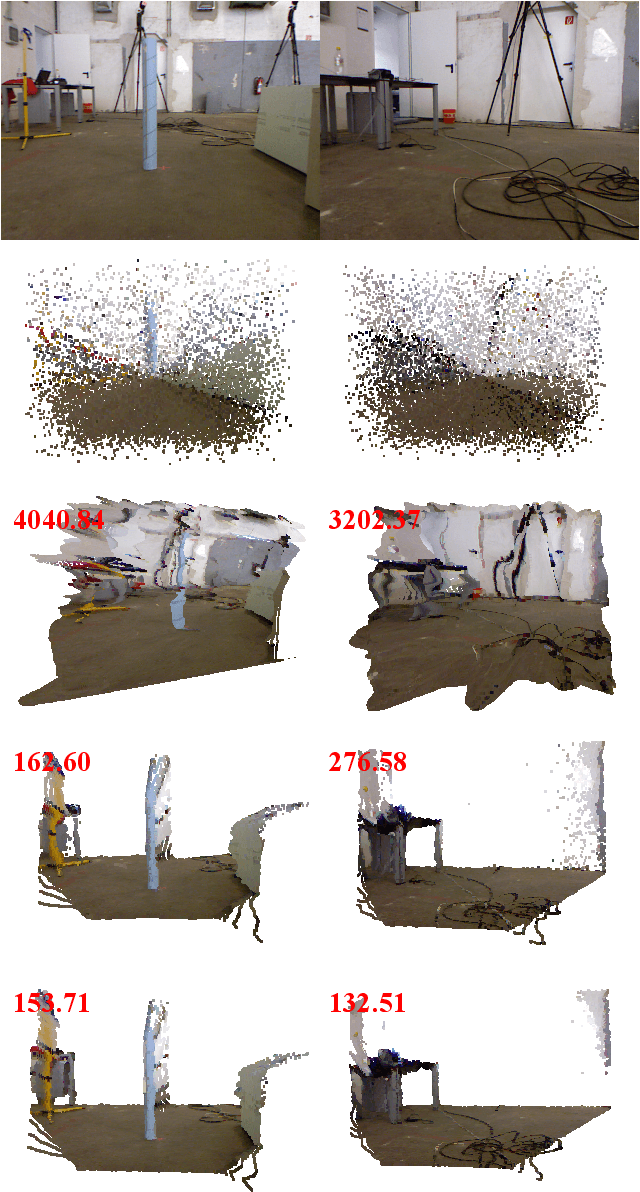
Depth estimation is an important capability for autonomous vehicles to understand and reconstruct 3D environments as well as avoid obstacles during the execution. Accurate depth sensors such as LiDARs are often heavy, expensive and can only provide sparse depth while lighter depth sensors such as stereo cameras are noiser in comparison. We propose an end-to-end learning algorithm that is capable of using sparse, noisy input depth for refinement and depth completion. Our model also produces the camera pose as a byproduct, making it a great solution for autonomous systems. We evaluate our approach on both indoor and outdoor datasets. Empirical results show that our method performs well on the KITTI~\cite{kitti_geiger2012we} dataset when compared to other competing methods, while having superior performance in dealing with sparse, noisy input depth on the TUM~\cite{sturm12iros} dataset.
MAVNet: an Effective Semantic Segmentation Micro-Network for MAV-based Tasks
Apr 03, 2019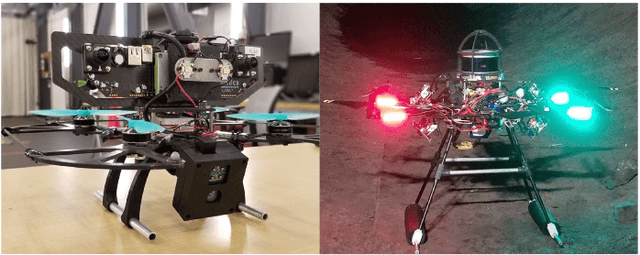
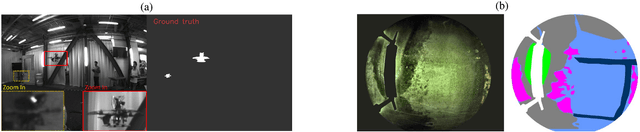
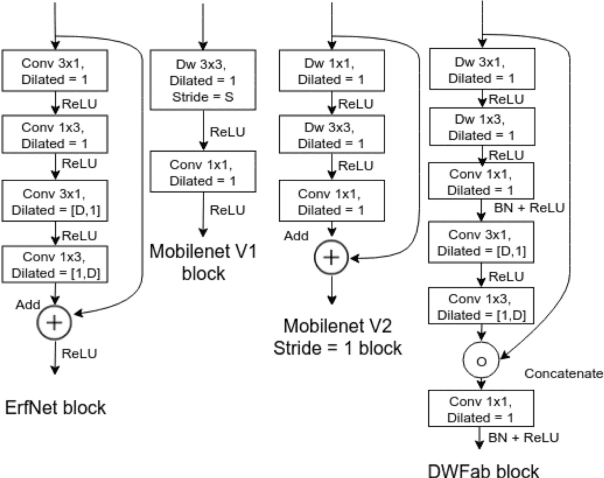

Real-time image semantic segmentation is an essential capability to enhance robot autonomy and improve human situational awareness. In this paper, we present MAVNet, a novel deep neural network approach for semantic segmentation suitable for small scale Micro Aerial Vehicles (MAVs). Our approach is compatible with the size, weight, and power(SWaP) constraints typical of small scale MAVs, which can only employ small processing units and GPUs. These units have typically limited computational capacity, which has to be concurrently shared with other real time performance tasks such as visual odometry and path planning. Our proposed solution MAVNet, is a fast and compact network inspired by ERFNet and features about 400 times fewer parameters in comparison. Experimental results on multiple datasets validate our proposed approach. Additionally, comparisons with other state of the art approaches show that our solution outperforms theirs in terms of speed and accuracy achieving up to 48 FPS on an NVIDIA 1080Ti and 9 FPS on the NVIDIA Jetson Xavier when processing high resolution imagery. Our algorithm and datasets are made publicly available.
U-Net for MAV-based Penstock Inspection: an Investigation of Focal Loss in Multi-class Segmentation for Corrosion Identification
Sep 18, 2018
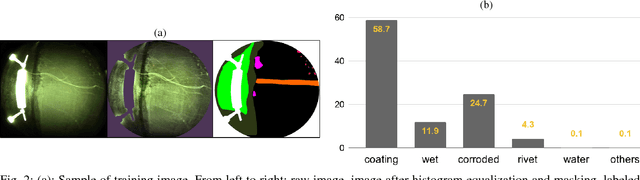
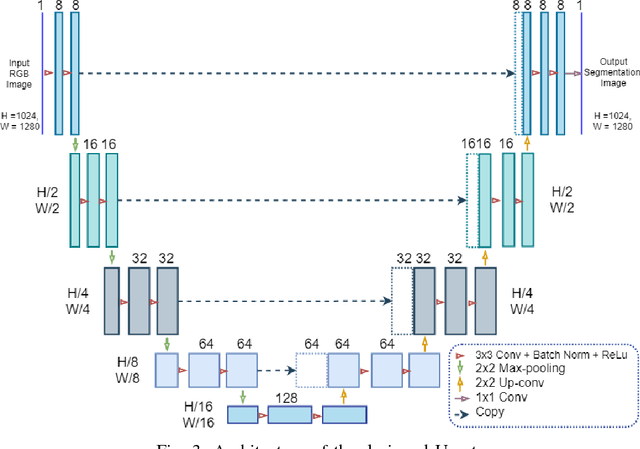
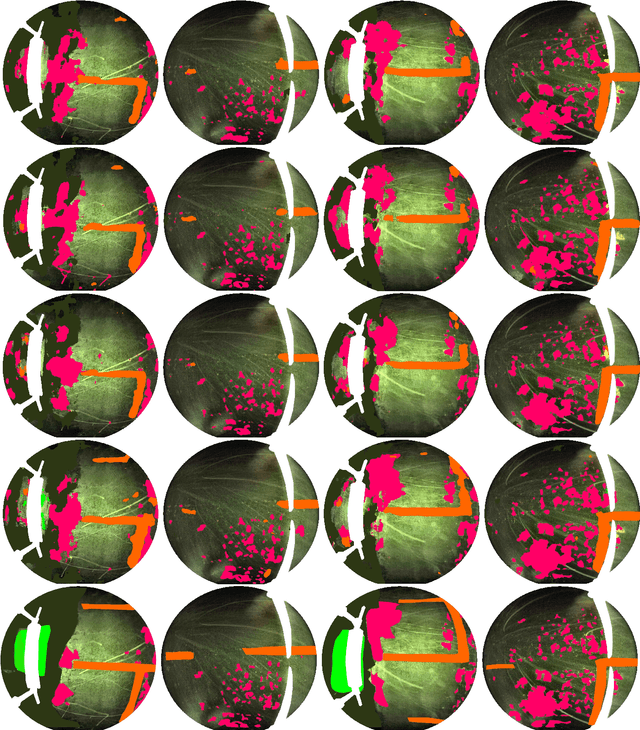
Periodical inspection and maintenance of critical infrastructure such as dams, penstocks, and locks are of significant importance to prevent catastrophic failures. Conventional manual inspection methods require inspectors to climb along a penstock to spot corrosion, rust and crack formation which is unsafe, labor-intensive, and requires intensive training. This work presents an alternative approach using a Micro Aerial Vehicle (MAV) that autonomously flies to collect imagery which is then fed into a pretrained deep-learning model to identify corrosion. Our simplified U-Net trained with less than 40 image samples can do inference at 12 fps on a single GPU. We analyze different loss functions to solve the class imbalance problem, followed by a discussion on choosing proper metrics and weights for object classes. Results obtained with the dataset collected from Center Hill Dam, TN show that focal loss function, combined with a proper set of class weights yield better segmentation results than the base loss, Softmax cross entropy. Our method can be used in combination with planning algorithm to offer a complete, safe and cost-efficient solution to autonomous infrastructure inspection.