 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIt Takes Two to Tango: A Holistic Simulator for Joint Order Scheduling and Multi-Agent Path Finding in Robotic Warehouses
Feb 15, 2026The prevailing paradigm in Robotic Mobile Fulfillment Systems (RMFS) typically treats order scheduling and multi-agent pathfinding as isolated sub-problems. We argue that this decoupling is a fundamental bottleneck, masking the critical dependencies between high-level dispatching and low-level congestion. Existing simulators fail to bridge this gap, often abstracting away heterogeneous kinematics and stochastic execution failures. We propose WareRover, a holistic simulation platform that enforces a tight coupling between OS and MAPF via a unified, closed-loop optimization interface. Unlike standard benchmarks, WareRover integrates dynamic order streams, physics-aware motion constraints, and non-nominal recovery mechanisms into a single evaluation loop. Experiments reveal that SOTA algorithms often falter under these realistic coupled constraints, demonstrating that WareRover provides a necessary and challenging testbed for robust, next-generation warehouse coordination. The project and video is available at https://hhh-x.github.io/WareRover/.
Where Paths Collide: A Comprehensive Survey of Classic and Learning-Based Multi-Agent Pathfinding
May 25, 2025Multi-Agent Path Finding (MAPF) is a fundamental problem in artificial intelligence and robotics, requiring the computation of collision-free paths for multiple agents navigating from their start locations to designated goals. As autonomous systems become increasingly prevalent in warehouses, urban transportation, and other complex environments, MAPF has evolved from a theoretical challenge to a critical enabler of real-world multi-robot coordination. This comprehensive survey bridges the long-standing divide between classical algorithmic approaches and emerging learning-based methods in MAPF research. We present a unified framework that encompasses search-based methods (including Conflict-Based Search, Priority-Based Search, and Large Neighborhood Search), compilation-based approaches (SAT, SMT, CSP, ASP, and MIP formulations), and data-driven techniques (reinforcement learning, supervised learning, and hybrid strategies). Through systematic analysis of experimental practices across 200+ papers, we uncover significant disparities in evaluation methodologies, with classical methods typically tested on larger-scale instances (up to 200 by 200 grids with 1000+ agents) compared to learning-based approaches (predominantly 10-100 agents). We provide a comprehensive taxonomy of evaluation metrics, environment types, and baseline selections, highlighting the need for standardized benchmarking protocols. Finally, we outline promising future directions including mixed-motive MAPF with game-theoretic considerations, language-grounded planning with large language models, and neural solver architectures that combine the rigor of classical methods with the flexibility of deep learning. This survey serves as both a comprehensive reference for researchers and a practical guide for deploying MAPF solutions in increasingly complex real-world applications.
SurgPose: Generalisable Surgical Instrument Pose Estimation using Zero-Shot Learning and Stereo Vision
May 16, 2025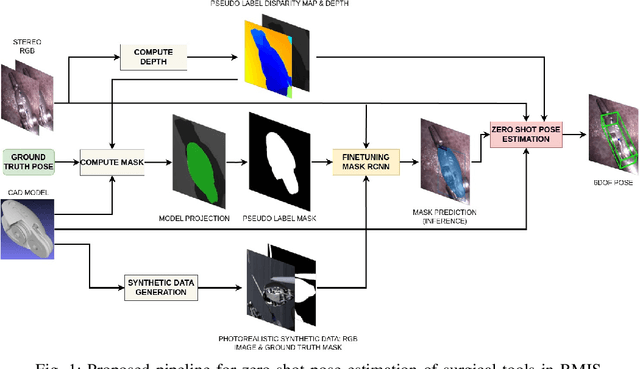
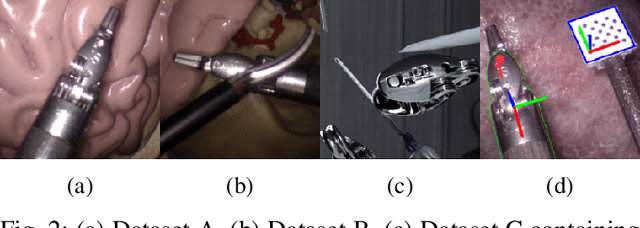
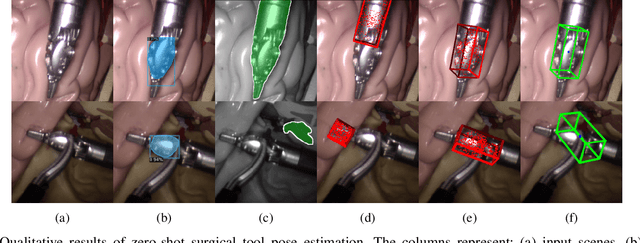
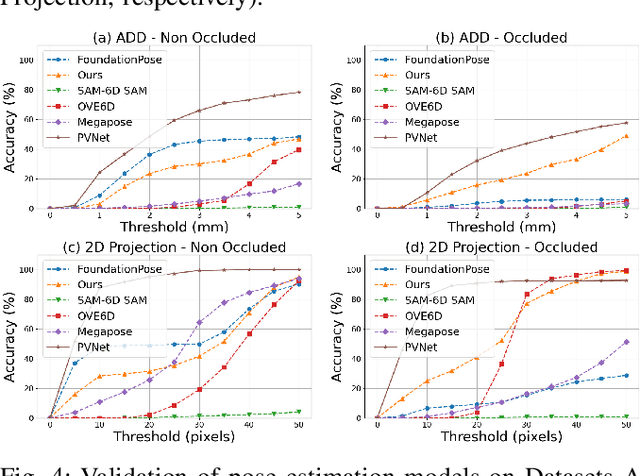
Accurate pose estimation of surgical tools in Robot-assisted Minimally Invasive Surgery (RMIS) is essential for surgical navigation and robot control. While traditional marker-based methods offer accuracy, they face challenges with occlusions, reflections, and tool-specific designs. Similarly, supervised learning methods require extensive training on annotated datasets, limiting their adaptability to new tools. Despite their success in other domains, zero-shot pose estimation models remain unexplored in RMIS for pose estimation of surgical instruments, creating a gap in generalising to unseen surgical tools. This paper presents a novel 6 Degrees of Freedom (DoF) pose estimation pipeline for surgical instruments, leveraging state-of-the-art zero-shot RGB-D models like the FoundationPose and SAM-6D. We advanced these models by incorporating vision-based depth estimation using the RAFT-Stereo method, for robust depth estimation in reflective and textureless environments. Additionally, we enhanced SAM-6D by replacing its instance segmentation module, Segment Anything Model (SAM), with a fine-tuned Mask R-CNN, significantly boosting segmentation accuracy in occluded and complex conditions. Extensive validation reveals that our enhanced SAM-6D surpasses FoundationPose in zero-shot pose estimation of unseen surgical instruments, setting a new benchmark for zero-shot RGB-D pose estimation in RMIS. This work enhances the generalisability of pose estimation for unseen objects and pioneers the application of RGB-D zero-shot methods in RMIS.
Confidence-based Intent Prediction for Teleoperation in Bimanual Robotic Suturing
Apr 29, 2025Robotic-assisted procedures offer enhanced precision, but while fully autonomous systems are limited in task knowledge, difficulties in modeling unstructured environments, and generalisation abilities, fully manual teleoperated systems also face challenges such as delay, stability, and reduced sensory information. To address these, we developed an interactive control strategy that assists the human operator by predicting their motion plan at both high and low levels. At the high level, a surgeme recognition system is employed through a Transformer-based real-time gesture classification model to dynamically adapt to the operator's actions, while at the low level, a Confidence-based Intention Assimilation Controller adjusts robot actions based on user intent and shared control paradigms. The system is built around a robotic suturing task, supported by sensors that capture the kinematics of the robot and task dynamics. Experiments across users with varying skill levels demonstrated the effectiveness of the proposed approach, showing statistically significant improvements in task completion time and user satisfaction compared to traditional teleoperation.
SurgRIPE challenge: Benchmark of Surgical Robot Instrument Pose Estimation
Jan 06, 2025



Accurate instrument pose estimation is a crucial step towards the future of robotic surgery, enabling applications such as autonomous surgical task execution. Vision-based methods for surgical instrument pose estimation provide a practical approach to tool tracking, but they often require markers to be attached to the instruments. Recently, more research has focused on the development of marker-less methods based on deep learning. However, acquiring realistic surgical data, with ground truth instrument poses, required for deep learning training, is challenging. To address the issues in surgical instrument pose estimation, we introduce the Surgical Robot Instrument Pose Estimation (SurgRIPE) challenge, hosted at the 26th International Conference on Medical Image Computing and Computer-Assisted Intervention (MICCAI) in 2023. The objectives of this challenge are: (1) to provide the surgical vision community with realistic surgical video data paired with ground truth instrument poses, and (2) to establish a benchmark for evaluating markerless pose estimation methods. The challenge led to the development of several novel algorithms that showcased improved accuracy and robustness over existing methods. The performance evaluation study on the SurgRIPE dataset highlights the potential of these advanced algorithms to be integrated into robotic surgery systems, paving the way for more precise and autonomous surgical procedures. The SurgRIPE challenge has successfully established a new benchmark for the field, encouraging further research and development in surgical robot instrument pose estimation.
SurgT challenge: Benchmark of Soft-Tissue Trackers for Robotic Surgery
Feb 28, 2023



This paper introduces the "SurgT: Surgical Tracking" challenge which was organised in conjunction with the 25th International Conference on Medical Image Computing and Computer-Assisted Intervention (MICCAI 2022). There were two purposes for the creation of this challenge: (1) the establishment of the first standardised benchmark for the research community to assess soft-tissue trackers; and (2) to encourage the development of unsupervised deep learning methods, given the lack of annotated data in surgery. A dataset of 157 stereo endoscopic videos from 20 clinical cases, along with stereo camera calibration parameters, have been provided. The participants were tasked with the development of algorithms to track a bounding box on stereo endoscopic videos. At the end of the challenge, the developed methods were assessed on a previously hidden test subset. This assessment uses benchmarking metrics that were purposely developed for this challenge and are now available online. The teams were ranked according to their Expected Average Overlap (EAO) score, which is a weighted average of the Intersection over Union (IoU) scores. The performance evaluation study verifies the efficacy of unsupervised deep learning algorithms in tracking soft-tissue. The best-performing method achieved an EAO score of 0.583 in the test subset. The dataset and benchmarking tool created for this challenge have been made publicly available. This challenge is expected to contribute to the development of autonomous robotic surgery and other digital surgical technologies.