 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeX4Val: Learning Neural Surrogates for Variance-Reduced Policy Evaluation
Jun 03, 2026Rigorous evaluation of learning-based robotic systems is an essential prerequisite for deployment. However, real-world test data is expensive to gather; moreover, in a typical iterative development context, data gathered from the latest policy is necessarily limited in scale. This motivates evaluation methodologies that make use of heterogeneous data sources, including simulation, historical policy logs, and data collected from related platforms or environments. While such auxiliary data are abundant and inexpensive, they are generally not directly representative of real-world outcomes -- for example, performance in simulation may differ substantially from performance in the real world -- making their principled use for high-confidence performance estimation challenging. In this paper, we introduce X4Val, a general framework for variance-reduced real-world metric estimation in the presence of non-paired, multi-domain data. X4Val embeds samples from real and auxiliary domains into a shared representation space and learns a transferable predictor of real-world metrics; this learned predictor is then incorporated into a control-variates estimator, enabling variance reduction even when paired samples are unavailable. We provide theoretical analysis and empirical evaluations on autonomous driving and real-world robot manipulation tasks, domains across which X4Val achieves up to 38.4% variance reduction and demonstrates consistent improvements over strong baselines. These results show that non-paired, heterogeneous data can be leveraged to substantially improve the sample efficiency of rigorous robotic system validation.
Agentic Trading: When LLM Agents Meet Financial Markets
May 19, 2026A growing body of work explores how Large Language Models (LLMs) can be embedded in trading systems as agents that perceive market information, retrieve context, reason about decisions, emit tradable actions, and adapt under market feedback. This paper reframes LLM-based trading agents as expert-system decision pipelines and presents an audit-oriented evidence map of 77 included studies in a protocol-coded snapshot screened through 2026-03-09. A primary empirical subset (n=19) satisfies the minimum boundary of Action Output plus Closed-Loop Evaluation; the remaining 58 included studies are retained as background and design context. The central empirical finding is protocol incomparability: within the primary subset, only 2/19 studies report extractable time-consistent split protocols, 1/19 reports an explicit transaction-cost model, 1/19 documents universe or survivorship handling, 11/19 report execution timing or semantics, 15/19 are coded as R0, and no study reaches R3 reproducibility. We therefore use Architecture-Capability-Adaptation as a working analytical lens rather than a validated taxonomy, and we foreground the evidence ledger, reproducibility audit, and reporting checklist as the main contributions. The resulting survey shows that architectural experimentation is expanding rapidly, while comparable evaluation protocols, execution semantics, and reproducible artifacts remain the field's immediate bottlenecks.
MAGIC: A Co-Evolving Attacker-Defender Adversarial Game for Robust LLM Safety
Feb 02, 2026Ensuring robust safety alignment is crucial for Large Language Models (LLMs), yet existing defenses often lag behind evolving adversarial attacks due to their \textbf{reliance on static, pre-collected data distributions}. In this paper, we introduce \textbf{MAGIC}, a novel multi-turn multi-agent reinforcement learning framework that formulates LLM safety alignment as an adversarial asymmetric game. Specifically, an attacker agent learns to iteratively rewrite original queries into deceptive prompts, while a defender agent simultaneously optimizes its policy to recognize and refuse such inputs. This dynamic process triggers a \textbf{co-evolution}, where the attacker's ever-changing strategies continuously uncover long-tail vulnerabilities, driving the defender to generalize to unseen attack patterns. Remarkably, we observe that the attacker, endowed with initial reasoning ability, evolves \textbf{novel, previously unseen combinatorial strategies} through iterative RL training, underscoring our method's substantial potential. Theoretically, we provide insights into a more robust game equilibrium and derive safety guarantees. Extensive experiments validate our framework's effectiveness, demonstrating superior defense success rates without compromising the helpfulness of the model. Our code is available at https://github.com/BattleWen/MAGIC.
Compose by Focus: Scene Graph-based Atomic Skills
Sep 19, 2025



A key requirement for generalist robots is compositional generalization - the ability to combine atomic skills to solve complex, long-horizon tasks. While prior work has primarily focused on synthesizing a planner that sequences pre-learned skills, robust execution of the individual skills themselves remains challenging, as visuomotor policies often fail under distribution shifts induced by scene composition. To address this, we introduce a scene graph-based representation that focuses on task-relevant objects and relations, thereby mitigating sensitivity to irrelevant variation. Building on this idea, we develop a scene-graph skill learning framework that integrates graph neural networks with diffusion-based imitation learning, and further combine "focused" scene-graph skills with a vision-language model (VLM) based task planner. Experiments in both simulation and real-world manipulation tasks demonstrate substantially higher success rates than state-of-the-art baselines, highlighting improved robustness and compositional generalization in long-horizon tasks.
MARS2 2025 Challenge on Multimodal Reasoning: Datasets, Methods, Results, Discussion, and Outlook
Sep 17, 2025
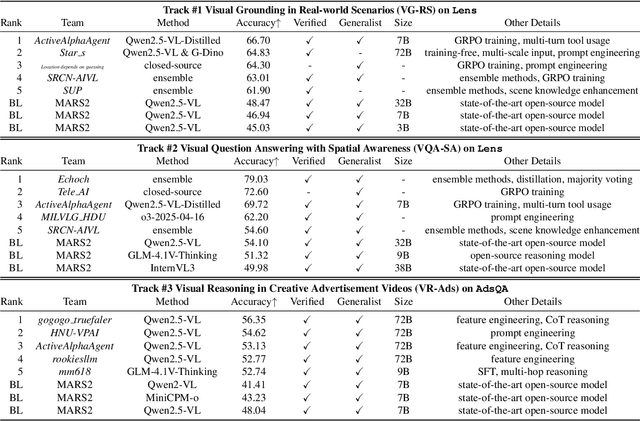

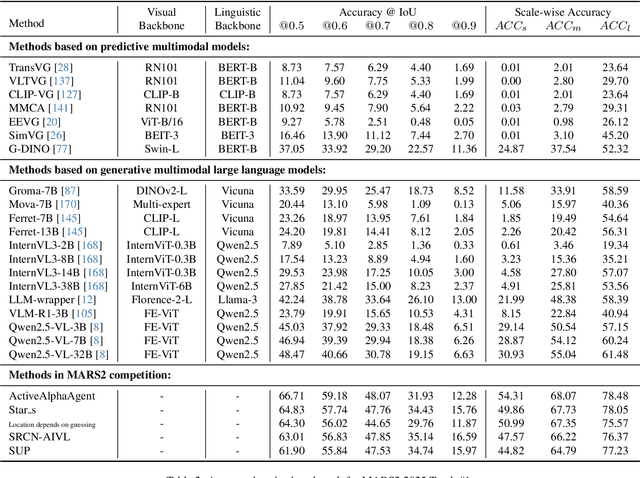
This paper reviews the MARS2 2025 Challenge on Multimodal Reasoning. We aim to bring together different approaches in multimodal machine learning and LLMs via a large benchmark. We hope it better allows researchers to follow the state-of-the-art in this very dynamic area. Meanwhile, a growing number of testbeds have boosted the evolution of general-purpose large language models. Thus, this year's MARS2 focuses on real-world and specialized scenarios to broaden the multimodal reasoning applications of MLLMs. Our organizing team released two tailored datasets Lens and AdsQA as test sets, which support general reasoning in 12 daily scenarios and domain-specific reasoning in advertisement videos, respectively. We evaluated 40+ baselines that include both generalist MLLMs and task-specific models, and opened up three competition tracks, i.e., Visual Grounding in Real-world Scenarios (VG-RS), Visual Question Answering with Spatial Awareness (VQA-SA), and Visual Reasoning in Creative Advertisement Videos (VR-Ads). Finally, 76 teams from the renowned academic and industrial institutions have registered and 40+ valid submissions (out of 1200+) have been included in our ranking lists. Our datasets, code sets (40+ baselines and 15+ participants' methods), and rankings are publicly available on the MARS2 workshop website and our GitHub organization page https://github.com/mars2workshop/, where our updates and announcements of upcoming events will be continuously provided.
SafeWork-R1: Coevolving Safety and Intelligence under the AI-45$^{\circ}$ Law
Jul 24, 2025



We introduce SafeWork-R1, a cutting-edge multimodal reasoning model that demonstrates the coevolution of capabilities and safety. It is developed by our proposed SafeLadder framework, which incorporates large-scale, progressive, safety-oriented reinforcement learning post-training, supported by a suite of multi-principled verifiers. Unlike previous alignment methods such as RLHF that simply learn human preferences, SafeLadder enables SafeWork-R1 to develop intrinsic safety reasoning and self-reflection abilities, giving rise to safety `aha' moments. Notably, SafeWork-R1 achieves an average improvement of $46.54\%$ over its base model Qwen2.5-VL-72B on safety-related benchmarks without compromising general capabilities, and delivers state-of-the-art safety performance compared to leading proprietary models such as GPT-4.1 and Claude Opus 4. To further bolster its reliability, we implement two distinct inference-time intervention methods and a deliberative search mechanism, enforcing step-level verification. Finally, we further develop SafeWork-R1-InternVL3-78B, SafeWork-R1-DeepSeek-70B, and SafeWork-R1-Qwen2.5VL-7B. All resulting models demonstrate that safety and capability can co-evolve synergistically, highlighting the generalizability of our framework in building robust, reliable, and trustworthy general-purpose AI.
Do We Truly Need So Many Samples? Multi-LLM Repeated Sampling Efficiently Scales Test-Time Compute
Apr 02, 2025



This paper presents a simple, effective, and cost-efficient strategy to improve LLM performance by scaling test-time compute. Our strategy builds upon the repeated-sampling-then-voting framework, with a novel twist: incorporating multiple models, even weaker ones, to leverage their complementary strengths that potentially arise from diverse training data and paradigms. By using consistency as a signal, our strategy dynamically switches between models. Theoretical analysis highlights the efficiency and performance advantages of our strategy. Extensive experiments on six datasets demonstrate that our strategy not only outperforms self-consistency and state-of-the-art multi-agent debate approaches, but also significantly reduces inference costs. Additionally, ModelSwitch requires only a few comparable LLMs to achieve optimal performance and can be extended with verification methods, demonstrating the potential of leveraging multiple LLMs in the generation-verification paradigm.
Graph Feedback Bandits on Similar Arms: With and Without Graph Structures
Jan 24, 2025



In this paper, we study the stochastic multi-armed bandit problem with graph feedback. Motivated by applications in clinical trials and recommendation systems, we assume that two arms are connected if and only if they are similar (i.e., their means are close to each other). We establish a regret lower bound for this problem under the novel feedback structure and introduce two upper confidence bound (UCB)-based algorithms: Double-UCB, which has problem-independent regret upper bounds, and Conservative-UCB, which has problem-dependent upper bounds. Leveraging the similarity structure, we also explore a scenario where the number of arms increases over time (referred to as the \emph{ballooning setting}). Practical applications of this scenario include Q\&A platforms (e.g., Reddit, Stack Overflow, Quora) and product reviews on platforms like Amazon and Flipkart, where answers (or reviews) continuously appear, and the goal is to display the best ones at the top. We extend these two UCB-based algorithms to the ballooning setting. Under mild assumptions, we provide regret upper bounds for both algorithms and discuss their sub-linearity. Furthermore, we propose a new version of the corresponding algorithms that do not rely on prior knowledge of the graph's structural information and provide regret upper bounds. Finally, we conduct experiments to validate the theoretical results.
Projecting Gaussian Ellipsoids While Avoiding Affine Projection Approximation
Nov 14, 2024



Recently, 3D Gaussian Splatting has dominated novel-view synthesis with its real-time rendering speed and state-of-the-art rendering quality. However, during the rendering process, the use of the Jacobian of the affine approximation of the projection transformation leads to inevitable errors, resulting in blurriness, artifacts and a lack of scene consistency in the final rendered images. To address this issue, we introduce an ellipsoid-based projection method to calculate the projection of Gaussian ellipsoid onto the image plane, which is the primitive of 3D Gaussian Splatting. As our proposed ellipsoid-based projection method cannot handle Gaussian ellipsoids with camera origins inside them or parts lying below $z=0$ plane in the camera space, we designed a pre-filtering strategy. Experiments over multiple widely adopted benchmark datasets show that our ellipsoid-based projection method can enhance the rendering quality of 3D Gaussian Splatting and its extensions.
Control-oriented Clustering of Visual Latent Representation
Oct 07, 2024



We initiate a study of the geometry of the visual representation space -- the information channel from the vision encoder to the action decoder -- in an image-based control pipeline learned from behavior cloning. Inspired by the phenomenon of neural collapse (NC) in image classification, we investigate whether a similar law of clustering emerges in the visual representation space. Since image-based control is a regression task without explicitly defined classes, the central piece of the puzzle lies in determining according to what implicit classes the visual features cluster, if such a law exists. Focusing on image-based planar pushing, we posit the most important role of the visual representation in a control task is to convey a goal to the action decoder. We then classify training samples of expert demonstrations into eight "control-oriented" classes based on (a) the relative pose between the object and the target in the input or (b) the relative pose of the object induced by expert actions in the output, where one class corresponds to one relative pose orthant (REPO). Across four different instantiations of architecture, we report the prevalent emergence of control-oriented clustering in the visual representation space according to the eight REPOs. Beyond empirical observation, we show such a law of clustering can be leveraged as an algorithmic tool to improve test-time performance when training a policy with limited expert demonstrations. Particularly, we pretrain the vision encoder using NC as a regularization to encourage control-oriented clustering of the visual features. Surprisingly, such an NC-pretrained vision encoder, when finetuned end-to-end with the action decoder, boosts the test-time performance by 10% to 35% in the low-data regime. Real-world vision-based planar pushing experiments confirmed the surprising advantage of control-oriented visual representation pretraining.