 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLow Frequency Spinning LiDAR De-Skewing
Mar 13, 2023Most commercially available Light Detection and Ranging (LiDAR)s measure the distances along a 2D section of the environment by sequentially sampling the free range along directions centered at the sensor's origin. When the sensor moves during the acquisition, the measured ranges are affected by a phenomenon known as skewing, which appears as a distortion in the acquired scan. Skewing potentially affects all systems that rely on LiDAR data, however it could be compensated if the position of the sensor were known each time a single range is measured. Most methods to de-skew a LiDAR are based on external sensors such as IMU or wheel odometry, to estimate these intermediate LiDAR positions. In this paper we present a method that relies exclusively on range measurements to effectively estimate the robot velocities which are then used for de-skewing. Our approach is suitable for low frequency LiDAR where the skewing is more evident. It can be seamlessly integrated into existing pipelines, enhancing their performance at negligible computational cost. We validated the proposed method with statistical experiments characterizing different operating conditions
Handling Constrained Optimization in Factor Graphs for Autonomous Navigation
Aug 12, 2022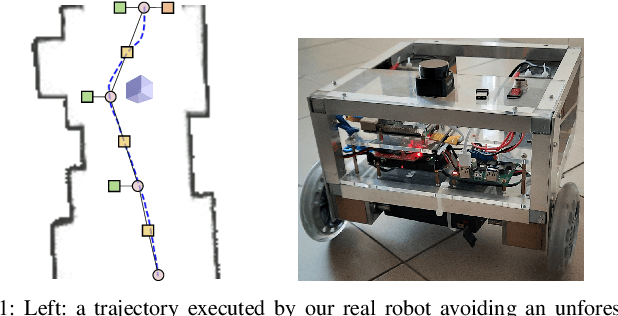
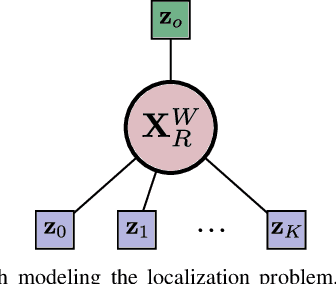
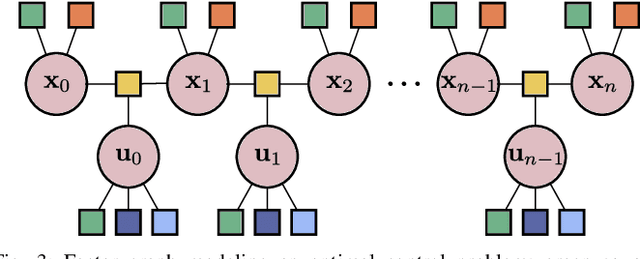
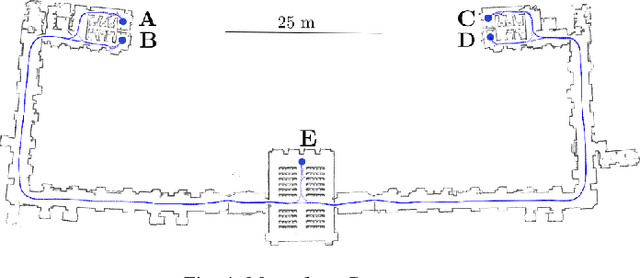
Factor graphs are graphical models used to represent a wide variety of problems across robotics, such as Structure from Motion (SfM), Simultaneous Localization and Mapping (SLAM) and calibration. Typically, at their core, they have an optimization problem whose terms only depend on a small subset of variables. Factor graph solvers exploit the locality of problems to drastically reduce the computational time of the Iterative Least-Squares (ILS) methodology. Although extremely powerful, their application is usually limited to unconstrained problems. In this paper, we model constraints over variables within factor graphs by introducing a factor graph version of the method of Lagrange Multipliers. We show the potential of our method by presenting a full navigation stack based on factor graphs. Differently from standard navigation stacks, we can model both optimal control for local planning and localization with factor graphs, and solve the two problems using the standard ILS methodology. We validate our approach in real-world autonomous navigation scenarios, comparing it with the de facto standard navigation stack implemented in ROS. Comparative experiments show that for the application at hand our system outperforms the standard nonlinear programming solver Interior-Point Optimizer (IPOPT) in runtime, while achieving similar solutions.
HiPE: Hierarchical Initialization for Pose Graphs
Jul 04, 2022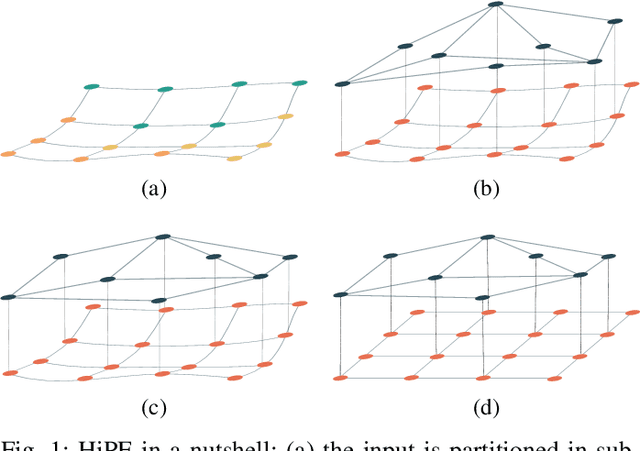
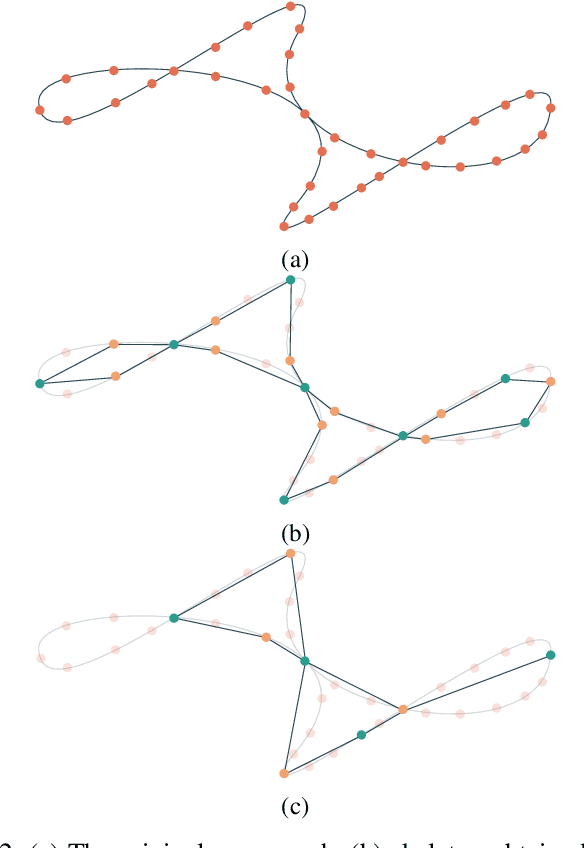
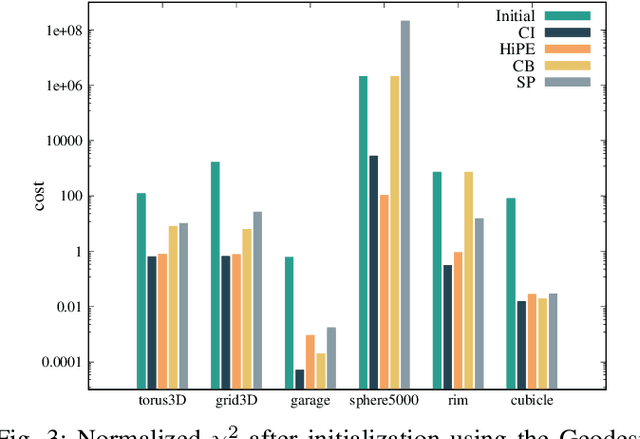
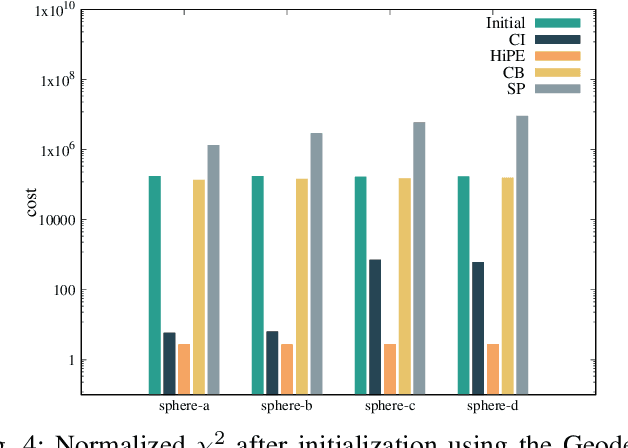
Pose graph optimization is a non-convex optimization problem encountered in many areas of robotics perception. Its convergence to an accurate solution is conditioned by two factors: the non-linearity of the cost function in use and the initial configuration of the pose variables. In this paper, we present HiPE, a novel hierarchical algorithm for pose graph initialization. Our approach exploits a coarse-grained graph that encodes an abstract representation of the problem geometry. We construct this graph by combining maximum likelihood estimates coming from local regions of the input. By leveraging the sparsity of this representation, we can initialize the pose graph in a non-linear fashion, without computational overhead compared to existing methods. The resulting initial guess can effectively bootstrap the fine-grained optimization that is used to obtain the final solution. In addition, we perform an empirical analysis on the impact of different cost functions on the final estimate. Our experimental evaluation shows that the usage of HiPE leads to a more efficient and robust optimization process, comparing favorably with state-of-the-art methods.
Software Architecture for Mobile Robots
Jun 07, 2022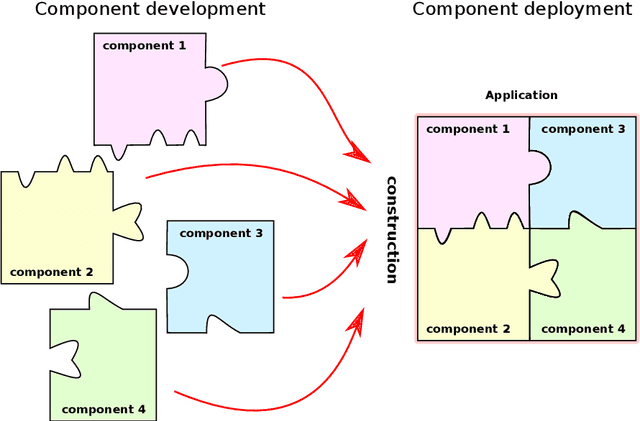
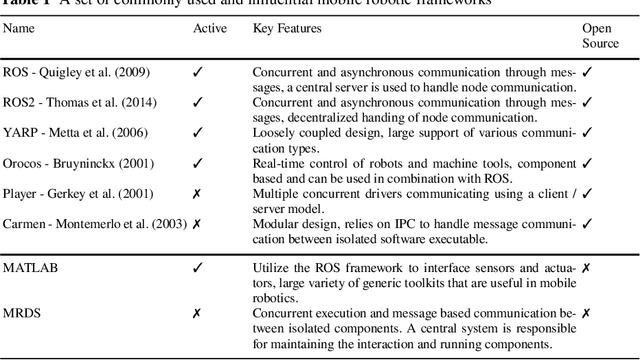
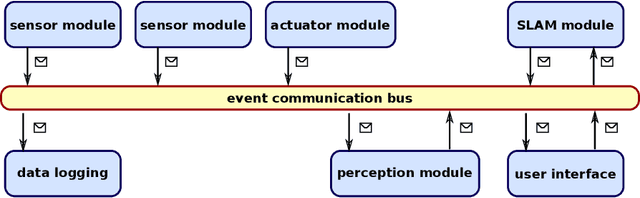
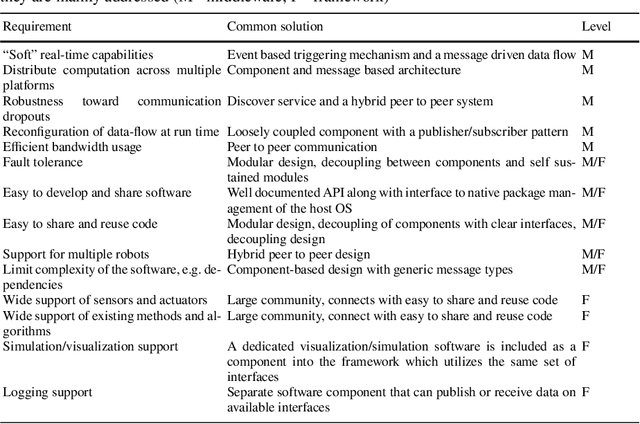
A software architecture defines the blueprints of a large computational system, and is thus a crucial part of the design and development effort. This task has been explored extensively in the context of mobile robots, resulting in a plethora of reference designs and implementations. As the software architecture defines the framework in which all components are implemented, it is naturally a very important aspect of a mobile robot system. In this chapter, we overview the requirements that the particular problem domain (a mobile robot system) imposes on the software framework. We discuss some of the current design solutions, provide a historical perspective on common frameworks, and outline directions for future development.
Sensors for Mobile Robots
Jun 07, 2022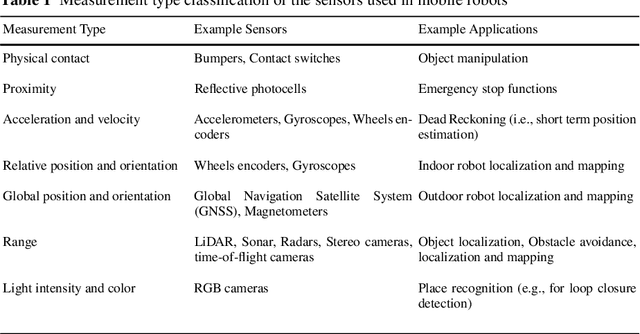
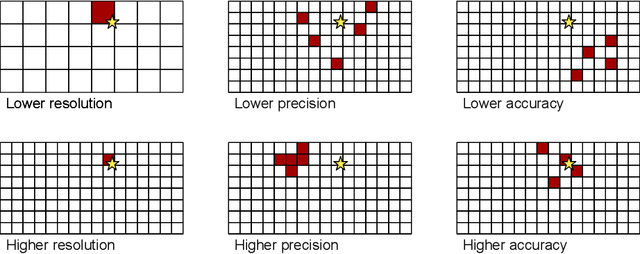
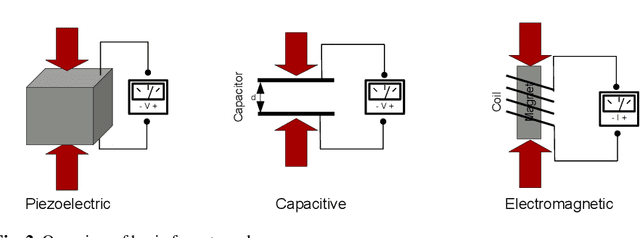
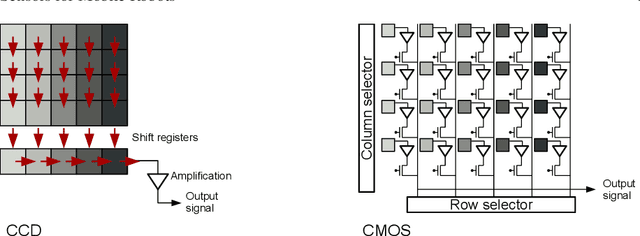
A sensor is a device that converts a physical parameter or an environmental characteristic (e.g., temperature, distance, speed, etc.) into a signal that can be digitally measured and processed to perform specific tasks. Mobile robots need sensors to measure properties of their environment, thus allowing for safe navigation, complex perception and corresponding actions and effective interactions with other agents that populate it. Sensors used by mobile robots range from simple tactile sensors, such as bumpers, to complex vision-based sensors such as structured light cameras. All of them provide a digital output (e.g., a string, a set of values, a matrix, etc.) that can be processed by the robot's computer. Such output is typically obtained by discretizing one or more analog electrical signals by using an Analog to Digital Converter (ADC) included in the sensor. In this chapter we present the most common sensors used in mobile robotics, providing an introduction to their taxonomy, basic features and specifications. The description of the functionalities and the types of applications follows a bottom-up approach: the basic principles and components on which the sensors are based are presented before describing real-world sensors, which are generally based on multiple technologies and basic devices.
Sparse Pose Graph Optimization in Cycle Space
Mar 29, 2022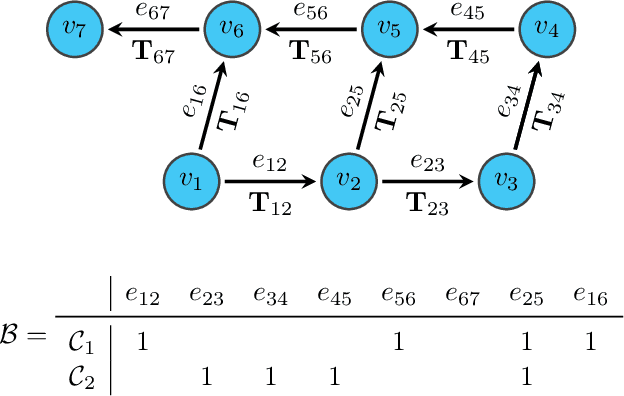
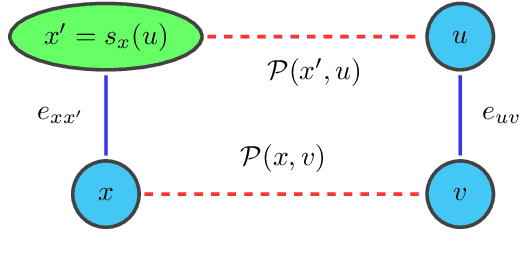
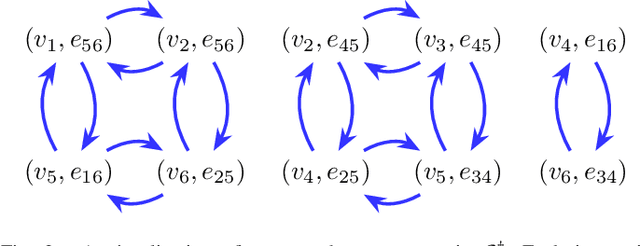
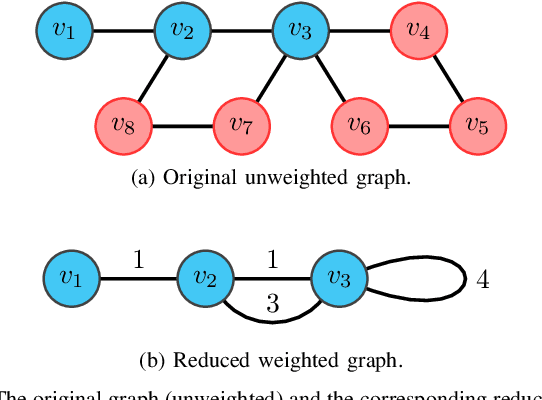
The state-of-the-art modern pose-graph optimization (PGO) systems are vertex based. In this context the number of variables might be high, albeit the number of cycles in the graph (loop closures) is relatively low. For sparse problems particularly, the cycle space has a significantly smaller dimension than the number of vertices. By exploiting this observation, in this paper we propose an alternative solution to PGO, that directly exploits the cycle space. We characterize the topology of the graph as a cycle matrix, and re-parameterize the problem using relative poses, which are further constrained by a cycle basis of the graph. We show that by using a minimum cycle basis, the cycle-based approach has superior convergence properties against its vertex-based counterpart, in terms of convergence speed and convergence to the global minimum. For sparse graphs, our cycle-based approach is also more time efficient than the vertex-based. As an additional contribution of this work we present an effective algorithm to compute the minimum cycle basis. Albeit known in computer science, we believe that this algorithm is not familiar to the robotics community. All the claims are validated by experiments on both standard benchmarks and simulated datasets. To foster the reproduction of the results, we provide a complete open-source C++ implementation (Code: \url{https://bitbucket.org/FangBai/cycleBasedPGO) of our approach.
* 20 pages
MD-SLAM: Multi-cue Direct SLAM
Mar 24, 2022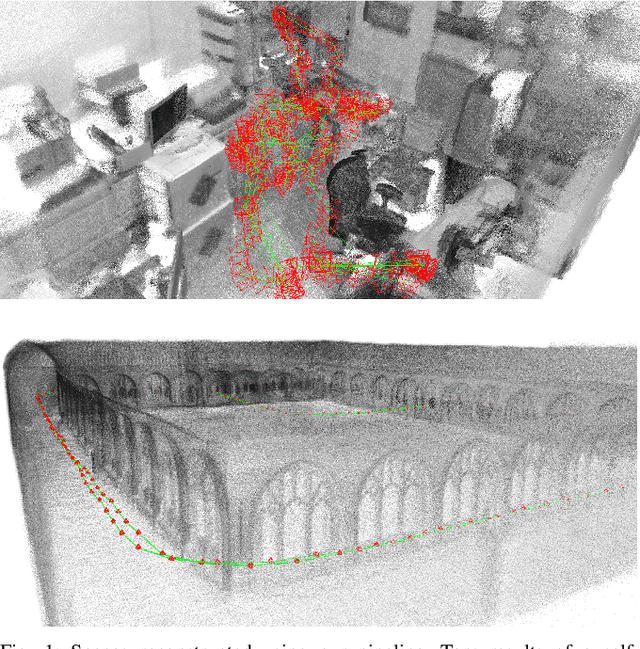
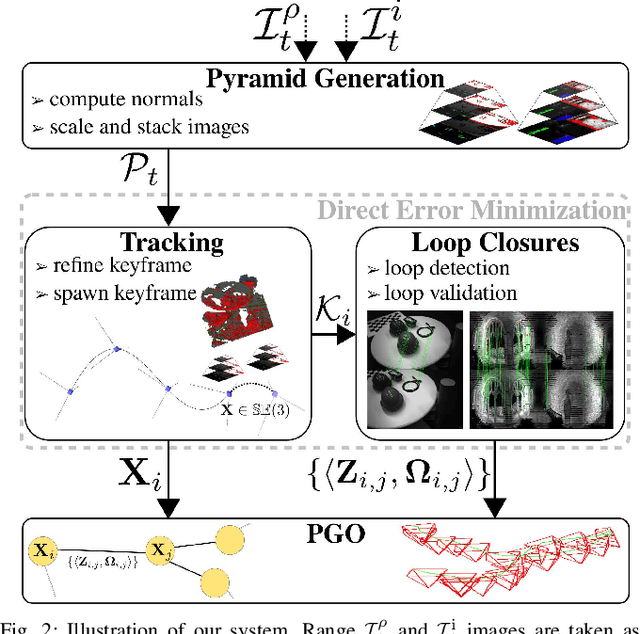
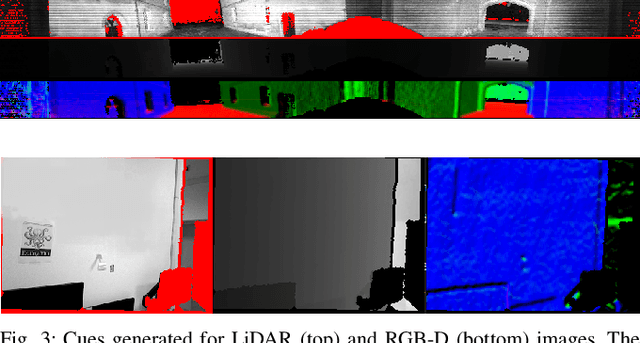

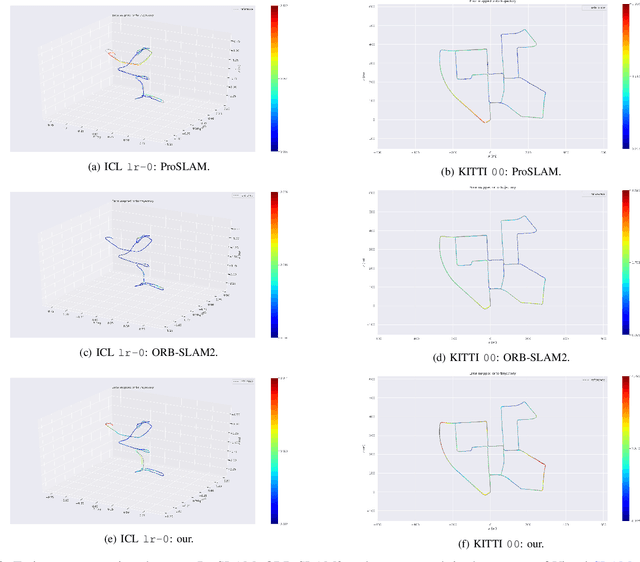
Simultaneous Localization and Mapping (SLAM) systems are fundamental building blocks for any autonomous robot navigating in unknown environments. The SLAM implementation heavily depends on the sensor modality employed on the mobile platform. For this reason, assumptions on the scene's structure are often made to maximize estimation accuracy. This paper presents a novel direct 3D SLAM pipeline that works independently for RGB-D and LiDAR sensors. Building upon prior work on multi-cue photometric frame-to-frame alignment, our proposed approach provides an easy-to-extend and generic SLAM system. Our pipeline requires only minor adaptations within the projection model to handle different sensor modalities. We couple a position tracking system with an appearance-based relocalization mechanism that handles large loop closures. Loop closures are validated by the same direct registration algorithm used for odometry estimation. We present comparative experiments with state-of-the-art approaches on publicly available benchmarks using RGB-D cameras and 3D LiDARs. Our system performs well in heterogeneous datasets compared to other sensor-specific methods while making no assumptions about the environment. Finally, we release an open-source C++ implementation of our system.
Visual Place Recognition using LiDAR Intensity Information
Mar 17, 2021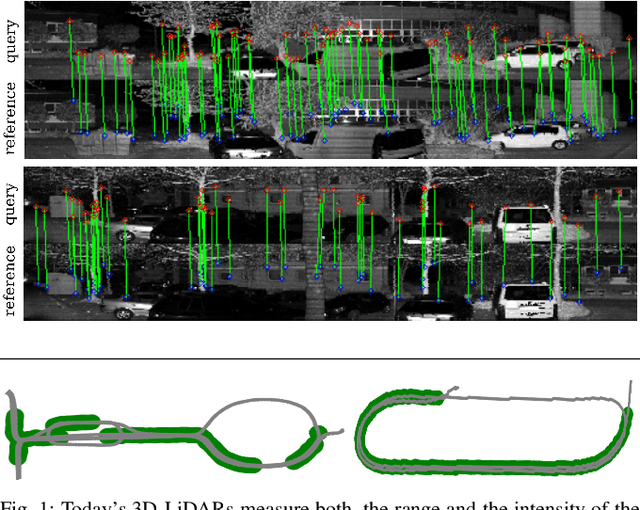
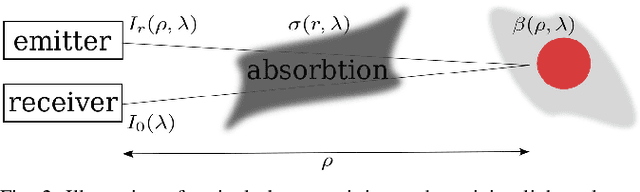
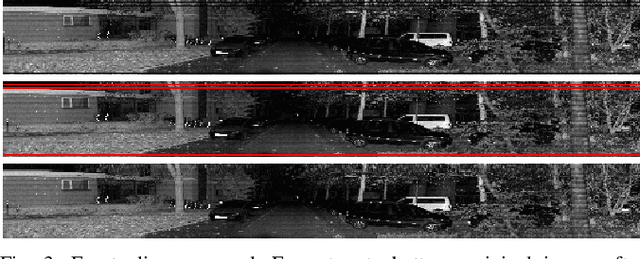
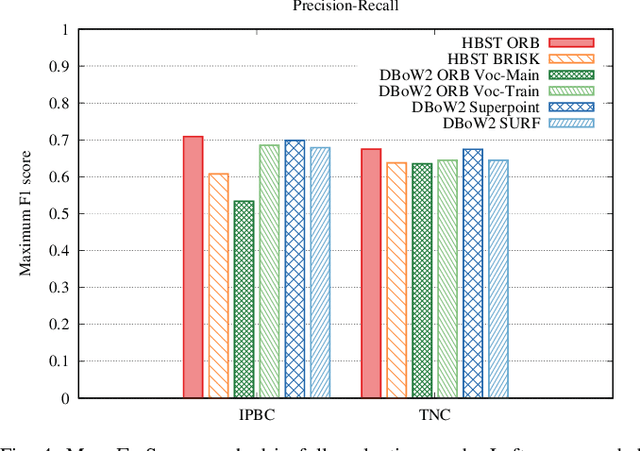
Robots and autonomous systems need to know where they are within a map to navigate effectively. Thus, simultaneous localization and mapping or SLAM is a common building block of robot navigation systems. When building a map via a SLAM system, robots need to re-recognize places to find loop closure and reduce the odometry drift. Image-based place recognition received a lot of attention in computer vision, and in this work, we investigate how such approaches can be used for 3D LiDAR data. Recent LiDAR sensors produce high-resolution 3D scans in combination with comparably stable intensity measurements. Through a cylindrical projection, we can turn this information into a panoramic image. As a result, we can apply techniques from visual place recognition to LiDAR intensity data. The question of how well this approach works in practice has not been answered so far. This paper provides an analysis of how such visual techniques can be with LiDAR data, and we provide an evaluation on different datasets. Our results suggest that this form of place recognition is possible and an effective means for determining loop closures.
Plug-and-Play SLAM: A Unified SLAM Architecture for Modularity and Ease of Use
Mar 02, 2020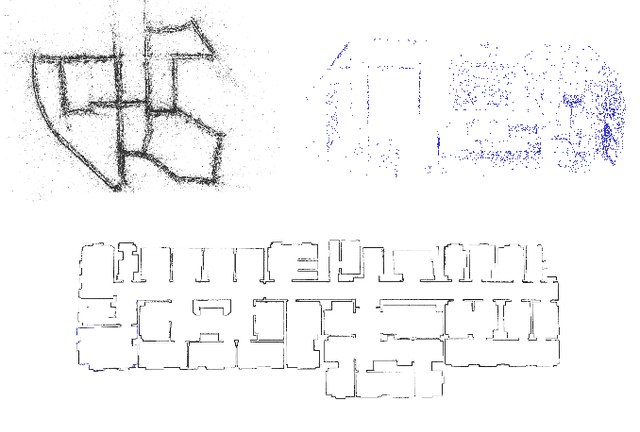
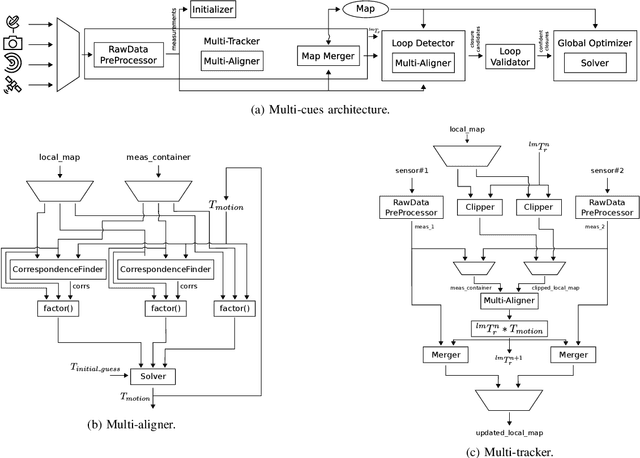
Nowadays, SLAM (Simultaneous Localization and Mapping) is considered by the Robotics community to be a mature field. Currently, there are many open-source systems that are able to deliver fast and accurate estimation in typical real-world scenarios. Still, all these systems often provide an ad-hoc implementation that entailed to predefined sensor configurations. In this work, we tackle this issue, proposing a novel SLAM architecture specifically designed to address heterogeneous sensors' configuration and to standardize SLAM solutions. Thanks to its modularity and to specific design patterns, the presented architecture is easy to extend, enhancing code reuse and efficiency. Finally, adopting our solution, we conducted comparative experiments for a variety of sensor configurations, showing competitive results that confirm state-of-the-art performance.
Least Squares Optimization: from Theory to Practice
Feb 26, 2020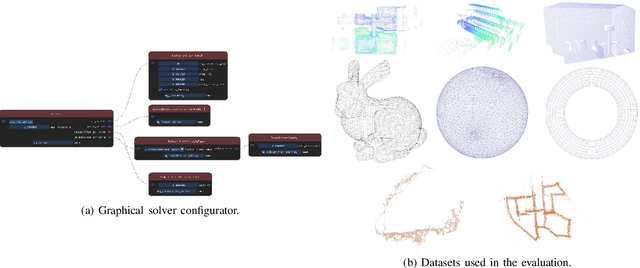
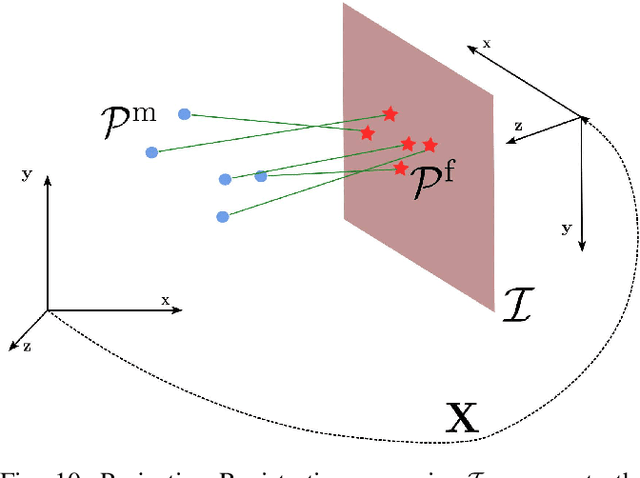
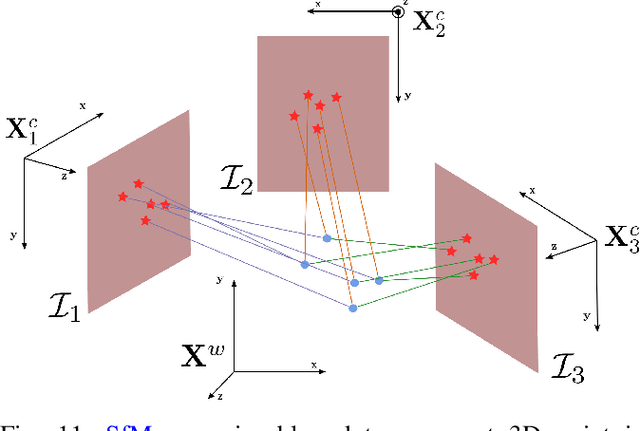
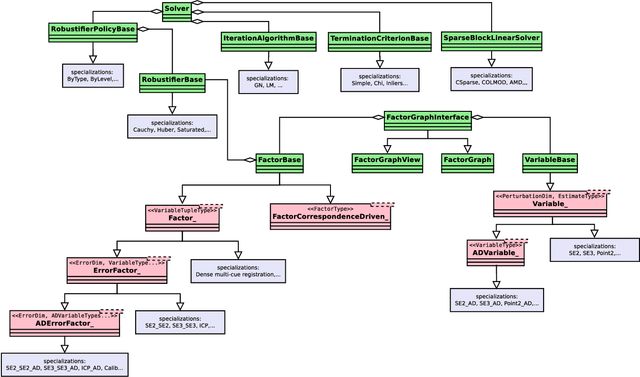
Nowadays, Non-Linear Least-Squares embodies the foundation of many Robotics and Computer Vision systems. The research community deeply investigated this topic in the last years, and this resulted in the development of several open-source solvers to approach constantly increasing classes of problems. In this work, we propose a unified methodology to design and develop efficient Least-Squares Optimization algorithms, focusing on the structures and patterns of each specific domain. Furthermore, we present a novel open-source optimization system, that addresses transparently problems with a different structure and designed to be easy to extend. The system is written in modern C++ and can run efficiently on embedded systems. Source code: https://srrg.gitlab.io/srrg2-solver.html. We validated our approach by conducting comparative experiments on several problems using standard datasets. The results show that our system achieves state-of-the-art performances in all tested scenarios.