 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAccurate Surface and Reflectance Modelling from 3D Radar Data with Neural Radiance Fields
Mar 26, 2026Robust scene representation is essential for autonomous systems to safely operate in challenging low-visibility environments. Radar has a clear advantage over cameras and lidars in these conditions due to its resilience to environmental factors such as fog, smoke, or dust. However, radar data is inherently sparse and noisy, making reliable 3D surface reconstruction challenging. To address these challenges, we propose a neural implicit approach for 3D mapping from radar point clouds, which jointly models scene geometry and view-dependent radar intensities. Our method leverages a memory-efficient hybrid feature encoding to learn a continuous Signed Distance Field (SDF) for surface reconstruction, while also capturing radar-specific reflective properties. We show that our approach produces smoother, more accurate 3D surface reconstructions compared to existing lidar-based reconstruction methods applied to radar data, and can reconstruct view-dependent radar intensities. We also show that in general, as input point clouds get sparser, neural implicit representations render more faithful surfaces, compared to traditional explicit SDFs and meshing techniques.
Single-View Shape Completion for Robotic Grasping in Clutter
Dec 18, 2025



In vision-based robot manipulation, a single camera view can only capture one side of objects of interest, with additional occlusions in cluttered scenes further restricting visibility. As a result, the observed geometry is incomplete, and grasp estimation algorithms perform suboptimally. To address this limitation, we leverage diffusion models to perform category-level 3D shape completion from partial depth observations obtained from a single view, reconstructing complete object geometries to provide richer context for grasp planning. Our method focuses on common household items with diverse geometries, generating full 3D shapes that serve as input to downstream grasp inference networks. Unlike prior work, which primarily considers isolated objects or minimal clutter, we evaluate shape completion and grasping in realistic clutter scenarios with household objects. In preliminary evaluations on a cluttered scene, our approach consistently results in better grasp success rates than a naive baseline without shape completion by 23% and over a recent state of the art shape completion approach by 19%. Our code is available at https://amm.aass.oru.se/shape-completion-grasping/.
Exploiting Radiance Fields for Grasp Generation on Novel Synthetic Views
May 16, 2025Vision based robot manipulation uses cameras to capture one or more images of a scene containing the objects to be manipulated. Taking multiple images can help if any object is occluded from one viewpoint but more visible from another viewpoint. However, the camera has to be moved to a sequence of suitable positions for capturing multiple images, which requires time and may not always be possible, due to reachability constraints. So while additional images can produce more accurate grasp poses due to the extra information available, the time-cost goes up with the number of additional views sampled. Scene representations like Gaussian Splatting are capable of rendering accurate photorealistic virtual images from user-specified novel viewpoints. In this work, we show initial results which indicate that novel view synthesis can provide additional context in generating grasp poses. Our experiments on the Graspnet-1billion dataset show that novel views contributed force-closure grasps in addition to the force-closure grasps obtained from sparsely sampled real views while also improving grasp coverage. In the future we hope this work can be extended to improve grasp extraction from radiance fields constructed with a single input image, using for example diffusion models or generalizable radiance fields.
Introspective Loop Closure for SLAM with 4D Imaging Radar
Mar 04, 2025Simultaneous Localization and Mapping (SLAM) allows mobile robots to navigate without external positioning systems or pre-existing maps. Radar is emerging as a valuable sensing tool, especially in vision-obstructed environments, as it is less affected by particles than lidars or cameras. Modern 4D imaging radars provide three-dimensional geometric information and relative velocity measurements, but they bring challenges, such as a small field of view and sparse, noisy point clouds. Detecting loop closures in SLAM is critical for reducing trajectory drift and maintaining map accuracy. However, the directional nature of 4D radar data makes identifying loop closures, especially from reverse viewpoints, difficult due to limited scan overlap. This article explores using 4D radar for loop closure in SLAM, focusing on similar and opposing viewpoints. We generate submaps for a denser environment representation and use introspective measures to reject false detections in feature-degenerate environments. Our experiments show accurate loop closure detection in geometrically diverse settings for both similar and opposing viewpoints, improving trajectory estimation with up to 82 % improvement in ATE and rejecting false positives in self-similar environments.
Learning the Approach During the Short-loading Cycle Using Reinforcement Learning
Jun 19, 2024The short-loading cycle is a repetitive task performed in high quantities, making it a great alternative for automation. In the short-loading cycle, an expert operator navigates towards a pile, fills the bucket with material, navigates to a dump truck, and dumps the material into the tipping body. The operator has to balance the productivity goal while minimising the fuel usage, to maximise the overall efficiency of the cycle. In addition, difficult interactions, such as the tyre-to-surface interaction further complicate the cycle. These types of hard-to-model interactions that can be difficult to address with rule-based systems, together with the efficiency requirements, motivate us to examine the potential of data-driven approaches. In this paper, the possibility of teaching an agent through reinforcement learning to approach a dump truck's tipping body and get in position to dump material in the tipping body is examined. The agent is trained in a 3D simulated environment to perform a simplified navigation task. The trained agent is directly transferred to a real vehicle, to perform the same task, with no additional training. The results indicate that the agent can successfully learn to navigate towards the dump truck with a limited amount of control signals in simulation and when transferred to a real vehicle, exhibits the correct behaviour.
Towards introspective loop closure in 4D radar SLAM
Apr 05, 2024



Imaging radar is an emerging sensor modality in the context of Localization and Mapping (SLAM), especially suitable for vision-obstructed environments. This article investigates the use of 4D imaging radars for SLAM and analyzes the challenges in robust loop closure. Previous work indicates that 4D radars, together with inertial measurements, offer ample information for accurate odometry estimation. However, the low field of view, limited resolution, and sparse and noisy measurements render loop closure a significantly more challenging problem. Our work builds on the previous work - TBV SLAM - which was proposed for robust loop closure with 360$^\circ$ spinning radars. This article highlights and addresses challenges inherited from a directional 4D radar, such as sparsity, noise, and reduced field of view, and discusses why the common definition of a loop closure is unsuitable. By combining multiple quality measures for accurate loop closure detection adapted to 4D radar data, significant results in trajectory estimation are achieved; the absolute trajectory error is as low as 0.46 m over a distance of 1.8 km, with consistent operation over multiple environments.
How-to Augmented Lagrangian on Factor Graphs
Aug 10, 2023



Factor graphs are a very powerful graphical representation, used to model many problems in robotics. They are widely spread in the areas of Simultaneous Localization and Mapping (SLAM), computer vision, and localization. In this paper we describe an approach to fill the gap with other areas, such as optimal control, by presenting an extension of Factor Graph Solvers to constrained optimization. The core idea of our method is to encapsulate the Augmented Lagrangian (AL) method in factors of the graph that can be integrated straightforwardly in existing factor graph solvers. We show the generality of our approach by addressing three applications, arising from different areas: pose estimation, rotation synchronization and Model Predictive Control (MPC) of a pseudo-omnidirectional platform. We implemented our approach using C++ and ROS. Besides the generality of the approach, application results show that we can favorably compare against domain specific approaches.
TBV Radar SLAM -- trust but verify loop candidates
Jan 12, 2023



Robust SLAM in large-scale environments requires fault resilience and awareness at multiple stages, from sensing and odometry estimation to loop closure. In this work, we present TBV (Trust But Verify) Radar SLAM, a method for radar SLAM that introspectively verifies loop closure candidates. TBV Radar SLAM achieves a high correct-loop-retrieval rate by combining multiple place-recognition techniques: tightly coupled place similarity and odometry uncertainty search, creating loop descriptors from origin-shifted scans, and delaying loop selection until after verification. Robustness to false constraints is achieved by carefully verifying and selecting the most likely ones from multiple loop constraints. Importantly, the verification and selection are carried out after registration when additional sources of loop evidence can easily be computed. We integrate our loop retrieval and verification method with a fault-resilient odometry pipeline within a pose graph framework. By evaluating on public benchmarks we found that TBV Radar SLAM achieves 65% lower error than the previous state of the art. We also show that it's generalizing across environments without needing to change any parameters.
Lidar-level localization with radar? The CFEAR approach to accurate, fast and robust large-scale radar odometry in diverse environments
Nov 07, 2022



This paper presents an accurate, highly efficient, and learning-free method for large-scale odometry estimation using spinning radar, empirically found to generalize well across very diverse environments -- outdoors, from urban to woodland, and indoors in warehouses and mines - without changing parameters. Our method integrates motion compensation within a sweep with one-to-many scan registration that minimizes distances between nearby oriented surface points and mitigates outliers with a robust loss function. Extending our previous approach CFEAR, we present an in-depth investigation on a wider range of data sets, quantifying the importance of filtering, resolution, registration cost and loss functions, keyframe history, and motion compensation. We present a new solving strategy and configuration that overcomes previous issues with sparsity and bias, and improves our state-of-the-art by 38%, thus, surprisingly, outperforming radar SLAM and approaching lidar SLAM. The most accurate configuration achieves 1.09% error at 5Hz on the Oxford benchmark, and the fastest achieves 1.79% error at 160Hz.
Software Architecture for Mobile Robots
Jun 07, 2022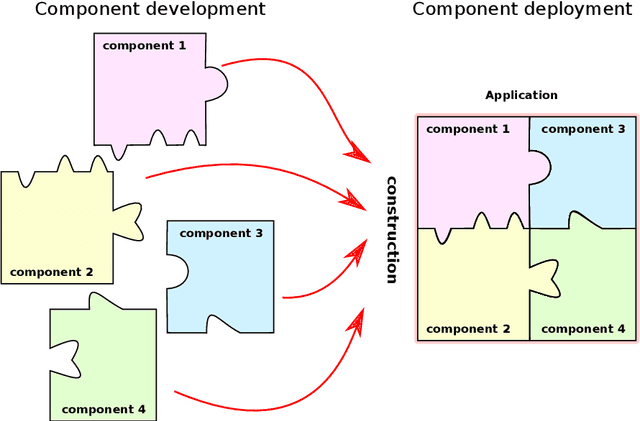
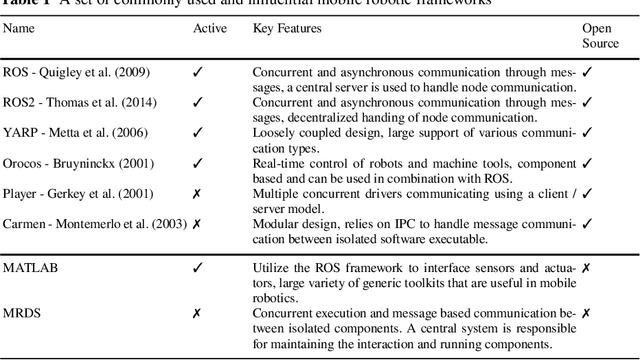
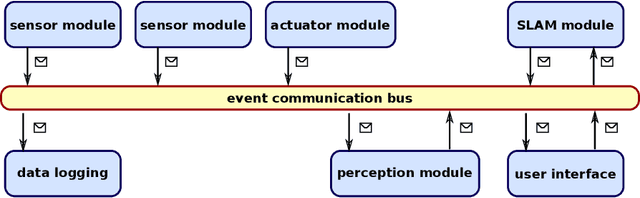
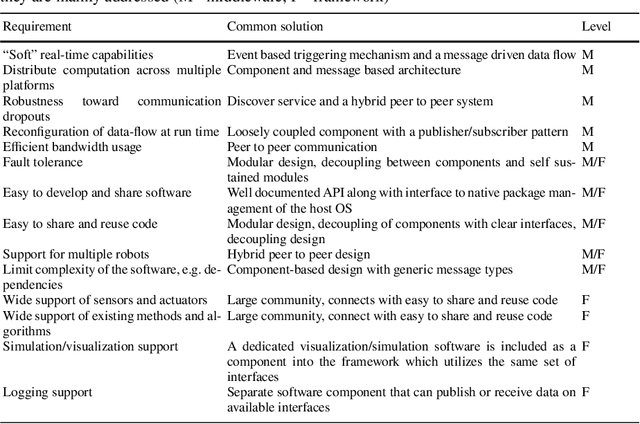
A software architecture defines the blueprints of a large computational system, and is thus a crucial part of the design and development effort. This task has been explored extensively in the context of mobile robots, resulting in a plethora of reference designs and implementations. As the software architecture defines the framework in which all components are implemented, it is naturally a very important aspect of a mobile robot system. In this chapter, we overview the requirements that the particular problem domain (a mobile robot system) imposes on the software framework. We discuss some of the current design solutions, provide a historical perspective on common frameworks, and outline directions for future development.