 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Aerial Non-Destructive Testing: Ultrasound Inspection with a Commercial Quadrotor in an Unstructured Environment
Mar 04, 2026This work presents an integrated control and software architecture that enables arguably the first fully autonomous, contact-based non-destructive testing (NDT) using a commercial multirotor originally restricted to remotely-piloted operations. To allow autonomous operation with an off-the-shelf platform, we developed a real-time framework that interfaces directly with its onboard sensor suite. The architecture features a multi-rate control scheme: low-level control is executed at 200 Hz, force estimation at 100 Hz, while an admittance filter and trajectory planner operate at 50 Hz, ultimately supplying acceleration and yaw rate commands to the internal flight controller. We validate the system through physical experiments on a Flyability Elios 3 quadrotor equipped with an ultrasound payload. Relying exclusively on onboard sensing, the vehicle successfully performs autonomous NDT measurements within an unstructured, industrial-like environment. This work demonstrates the viability of retrofitting off-the-shelf platforms for autonomous physical interaction, paving the way for safe, contact-based inspection of hazardous and confined infrastructure.
How-to Augmented Lagrangian on Factor Graphs
Aug 10, 2023



Factor graphs are a very powerful graphical representation, used to model many problems in robotics. They are widely spread in the areas of Simultaneous Localization and Mapping (SLAM), computer vision, and localization. In this paper we describe an approach to fill the gap with other areas, such as optimal control, by presenting an extension of Factor Graph Solvers to constrained optimization. The core idea of our method is to encapsulate the Augmented Lagrangian (AL) method in factors of the graph that can be integrated straightforwardly in existing factor graph solvers. We show the generality of our approach by addressing three applications, arising from different areas: pose estimation, rotation synchronization and Model Predictive Control (MPC) of a pseudo-omnidirectional platform. We implemented our approach using C++ and ROS. Besides the generality of the approach, application results show that we can favorably compare against domain specific approaches.
Handling Constrained Optimization in Factor Graphs for Autonomous Navigation
Aug 12, 2022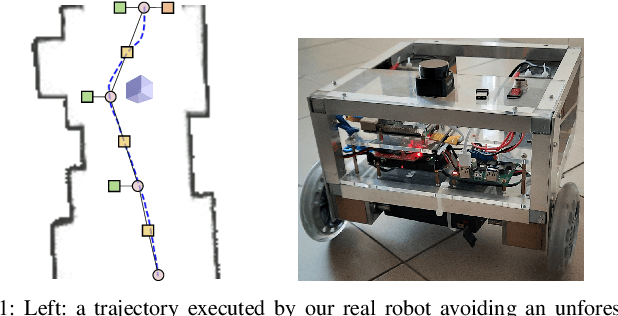
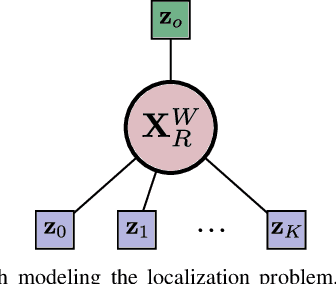
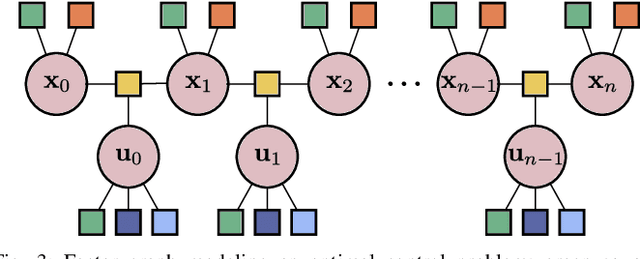
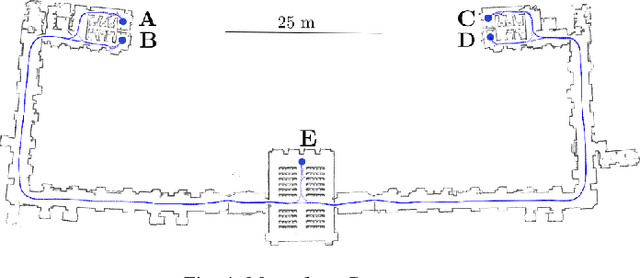
Factor graphs are graphical models used to represent a wide variety of problems across robotics, such as Structure from Motion (SfM), Simultaneous Localization and Mapping (SLAM) and calibration. Typically, at their core, they have an optimization problem whose terms only depend on a small subset of variables. Factor graph solvers exploit the locality of problems to drastically reduce the computational time of the Iterative Least-Squares (ILS) methodology. Although extremely powerful, their application is usually limited to unconstrained problems. In this paper, we model constraints over variables within factor graphs by introducing a factor graph version of the method of Lagrange Multipliers. We show the potential of our method by presenting a full navigation stack based on factor graphs. Differently from standard navigation stacks, we can model both optimal control for local planning and localization with factor graphs, and solve the two problems using the standard ILS methodology. We validate our approach in real-world autonomous navigation scenarios, comparing it with the de facto standard navigation stack implemented in ROS. Comparative experiments show that for the application at hand our system outperforms the standard nonlinear programming solver Interior-Point Optimizer (IPOPT) in runtime, while achieving similar solutions.