 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMixed Graph Signal Analysis of Joint Image Denoising / Interpolation
Sep 18, 2023

A noise-corrupted image often requires interpolation. Given a linear denoiser and a linear interpolator, when should the operations be independently executed in separate steps, and when should they be combined and jointly optimized? We study joint denoising / interpolation of images from a mixed graph filtering perspective: we model denoising using an undirected graph, and interpolation using a directed graph. We first prove that, under mild conditions, a linear denoiser is a solution graph filter to a maximum a posteriori (MAP) problem regularized using an undirected graph smoothness prior, while a linear interpolator is a solution to a MAP problem regularized using a directed graph smoothness prior. Next, we study two variants of the joint interpolation / denoising problem: a graph-based denoiser followed by an interpolator has an optimal separable solution, while an interpolator followed by a denoiser has an optimal non-separable solution. Experiments show that our joint denoising / interpolation method outperformed separate approaches noticeably.
Retinex-based Image Denoising / Contrast Enhancement using Gradient Graph Laplacian Regularizer
Jul 24, 2023



Images captured in poorly lit conditions are often corrupted by acquisition noise. Leveraging recent advances in graph-based regularization, we propose a fast Retinex-based restoration scheme that denoises and contrast-enhances an image. Specifically, by Retinex theory we first assume that each image pixel is a multiplication of its reflectance and illumination components. We next assume that the reflectance and illumination components are piecewise constant (PWC) and continuous piecewise planar (PWP) signals, which can be recovered via graph Laplacian regularizer (GLR) and gradient graph Laplacian regularizer (GGLR) respectively. We formulate quadratic objectives regularized by GLR and GGLR, which are minimized alternately until convergence by solving linear systems -- with improved condition numbers via proposed preconditioners -- via conjugate gradient (CG) efficiently. Experimental results show that our algorithm achieves competitive visual image quality while reducing computation complexity noticeably.
Complex Graph Laplacian Regularizer for Inferencing Grid States
Jul 04, 2023



In order to maintain stable grid operations, system monitoring and control processes require the computation of grid states (e.g. voltage magnitude and angles) at high granularity. It is necessary to infer these grid states from measurements generated by a limited number of sensors like phasor measurement units (PMUs) that can be subjected to delays and losses due to channel artefacts, and/or adversarial attacks (e.g. denial of service, jamming, etc.). We propose a novel graph signal processing (GSP) based algorithm to interpolate states of the entire grid from observations of a small number of grid measurements. It is a two-stage process, where first an underlying Hermitian graph is learnt empirically from existing grid datasets. Then, the graph is used to interpolate missing grid signal samples in linear time. With our proposal, we can effectively reconstruct grid signals with significantly smaller number of observations when compared to existing traditional approaches (e.g. state estimation). In contrast to existing GSP approaches, we do not require knowledge of the underlying grid structure and parameters and are able to guarantee fast spectral optimization. We demonstrate the computational efficacy and accuracy of our proposal via practical studies conducted on the IEEE 118 bus system.
Graph Sparsification for GCN Towards Optimal Crop Yield Predictions
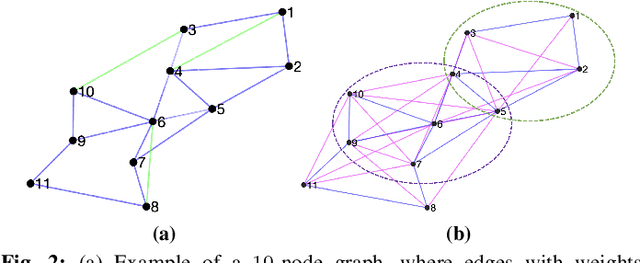
Jun 02, 2023In agronomics, predicting crop yield at a per field/county granularity is important for farmers to minimize uncertainty and plan seeding for the next crop cycle. While state-of-the-art prediction techniques employ graph convolutional nets (GCN) to predict future crop yields given relevant features and crop yields of previous years, a dense underlying graph kernel requires long training and execution time. In this paper, we propose a graph sparsification method based on the Fiedler number to remove edges from a complete graph kernel, in order to lower the complexity of GCN training/execution. Specifically, we first show that greedily removing an edge at a time that induces the minimal change in the second eigenvalue leads to a sparse graph with good GCN performance. We then propose a fast method to choose an edge for removal per iteration based on an eigenvalue perturbation theorem. Experiments show that our Fiedler-based method produces a sparse graph with good GCN performance compared to other graph sparsification schemes in crop yield prediction.
Modeling Viral Information Spreading via Directed Acyclic Graph Diffusion
May 09, 2023



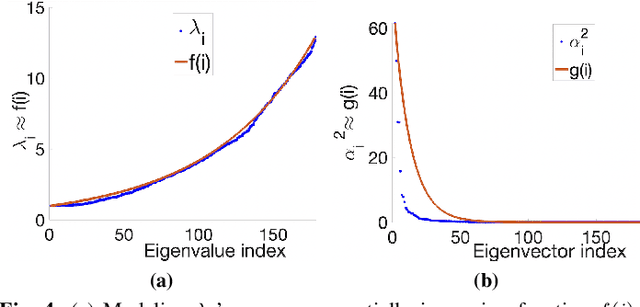
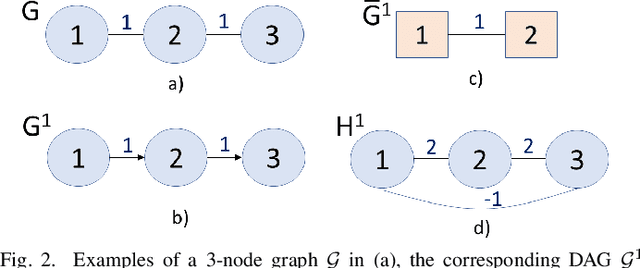
Viral information like rumors or fake news is spread over a communication network like a virus infection in a unidirectional manner: entity $i$ conveys information to a neighbor $j$, resulting in two equally informed (infected) parties. Existing graph diffusion works focus only on bidirectional diffusion on an undirected graph. Instead, we propose a new directed acyclic graph (DAG) diffusion model to estimate the probability $x_i(t)$ of node $i$'s infection at time $t$ given a source node $s$, where $x_i(\infty)~=~1$. Specifically, given an undirected positive graph modeling node-to-node communication, we first compute its graph embedding: a latent coordinate for each node in an assumed low-dimensional manifold space from extreme eigenvectors via LOBPCG. Next, we construct a DAG based on Euclidean distances between latent coordinates. Spectrally, we prove that the asymmetric DAG Laplacian matrix contains real non-negative eigenvalues, and that the DAG diffusion converges to the all-infection vector $\x(\infty) = \1$ as $t \rightarrow \infty$. Simulation experiments show that our proposed DAG diffusion accurately models viral information spreading over a variety of graph structures at different time instants.
Volumetric Attribute Compression for 3D Point Clouds using Feedforward Network with Geometric Attention
Apr 01, 2023We study 3D point cloud attribute compression using a volumetric approach: given a target volumetric attribute function $f : \mathbb{R}^3 \rightarrow \mathbb{R}$, we quantize and encode parameter vector $\theta$ that characterizes $f$ at the encoder, for reconstruction $f_{\hat{\theta}}(\mathbf{x})$ at known 3D points $\mathbf{x}$'s at the decoder. Extending a previous work Region Adaptive Hierarchical Transform (RAHT) that employs piecewise constant functions to span a nested sequence of function spaces, we propose a feedforward linear network that implements higher-order B-spline bases spanning function spaces without eigen-decomposition. Feedforward network architecture means that the system is amenable to end-to-end neural learning. The key to our network is space-varying convolution, similar to a graph operator, whose weights are computed from the known 3D geometry for normalization. We show that the number of layers in the normalization at the encoder is equivalent to the number of terms in a matrix inverse Taylor series. Experimental results on real-world 3D point clouds show up to 2-3 dB gain over RAHT in energy compaction and 20-30% bitrate reduction.
Efficient Directed Graph Sampling via Gershgorin Disc Alignment
Oct 25, 2022


Graph sampling is the problem of choosing a node subset via sampling matrix $\mathbf{H} \in \{0,1\}^{K \times N}$ to collect samples $\mathbf{y} = \mathbf{H} \mathbf{x} \in \mathbb{R}^K$, $K < N$, so that the target signal $\mathbf{x} \in \mathbb{R}^N$ can be reconstructed in high fidelity. While sampling on undirected graphs is well studied, we propose the first sampling scheme tailored specifically for directed graphs, leveraging a previous undirected graph sampling method based on Gershgorin disc alignment (GDAS). Concretely, given a directed positive graph $\mathcal{G}^d$ specified by random-walk graph Laplacian matrix $\mathbf{L}_{rw}$, we first define reconstruction of a smooth signal $\mathbf{x}^*$ from samples $\mathbf{y}$ using graph shift variation (GSV) $\|\mathbf{L}_{rw} \mathbf{x}\|^2_2$ as a signal prior. To minimize worst-case reconstruction error of the linear system solution $\mathbf{x}^* = \mathbf{C}^{-1} \mathbf{H}^\top \mathbf{y}$ with symmetric coefficient matrix $\mathbf{C} = \mathbf{H}^\top \mathbf{H} + \mu \mathbf{L}_{rw}^\top \mathbf{L}_{rw}$, the sampling objective is to choose $\mathbf{H}$ to maximize the smallest eigenvalue $\lambda_{\min}(\mathbf{C})$ of $\mathbf{C}$. To circumvent eigen-decomposition entirely, we maximize instead a lower bound $\lambda^-_{\min}(\mathbf{S}\mathbf{C}\mathbf{S}^{-1})$ of $\lambda_{\min}(\mathbf{C})$ -- smallest Gershgorin disc left-end of a similarity transform of $\mathbf{C}$ -- via a variant of GDAS based on Gershgorin circle theorem (GCT). Experimental results show that our sampling method yields smaller signal reconstruction errors at a faster speed compared to competing schemes.
Efficient Signed Graph Sampling via Balancing & Gershgorin Disc Perfect Alignment
Aug 18, 2022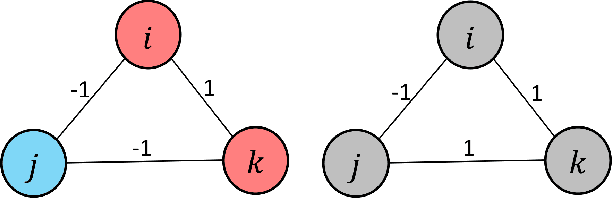
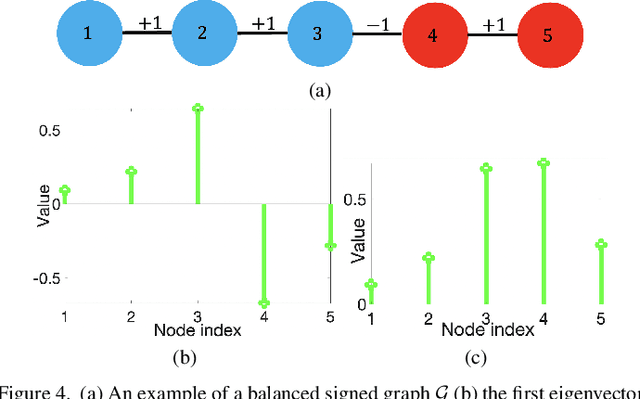
A basic premise in graph signal processing (GSP) is that a graph encoding pairwise (anti-)correlations of the targeted signal as edge weights is exploited for graph filtering. However, existing fast graph sampling schemes are designed and tested only for positive graphs describing positive correlations. In this paper, we show that for datasets with strong inherent anti-correlations, a suitable graph contains both positive and negative edge weights. In response, we propose a linear-time signed graph sampling method centered on the concept of balanced signed graphs. Specifically, given an empirical covariance data matrix $\bar{\bf{C}}$, we first learn a sparse inverse matrix (graph Laplacian) $\mathcal{L}$ corresponding to a signed graph $\mathcal{G}$. We define the eigenvectors of Laplacian $\mathcal{L}_B$ for a balanced signed graph $\mathcal{G}_B$ -- approximating $\mathcal{G}$ via edge weight augmentation -- as graph frequency components. Next, we choose samples to minimize the low-pass filter reconstruction error in two steps. We first align all Gershgorin disc left-ends of Laplacian $\mathcal{L}_B$ at smallest eigenvalue $\lambda_{\min}(\mathcal{L}_B)$ via similarity transform $\mathcal{L}_p = \S \mathcal{L}_B \S^{-1}$, leveraging a recent linear algebra theorem called Gershgorin disc perfect alignment (GDPA). We then perform sampling on $\mathcal{L}_p$ using a previous fast Gershgorin disc alignment sampling (GDAS) scheme. Experimental results show that our signed graph sampling method outperformed existing fast sampling schemes noticeably on various datasets.
Unsupervised Graph Spectral Feature Denoising for Crop Yield Prediction
Aug 04, 2022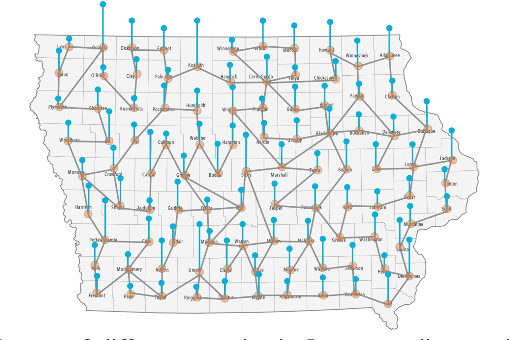
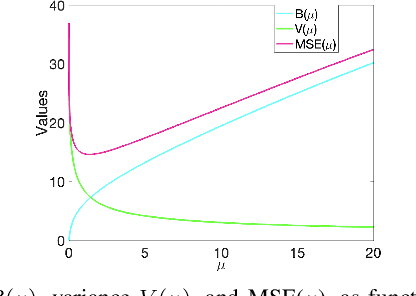
Prediction of annual crop yields at a county granularity is important for national food production and price stability. In this paper, towards the goal of better crop yield prediction, leveraging recent graph signal processing (GSP) tools to exploit spatial correlation among neighboring counties, we denoise relevant features via graph spectral filtering that are inputs to a deep learning prediction model. Specifically, we first construct a combinatorial graph with edge weights that encode county-to-county similarities in soil and location features via metric learning. We then denoise features via a maximum a posteriori (MAP) formulation with a graph Laplacian regularizer (GLR). We focus on the challenge to estimate the crucial weight parameter $\mu$, trading off the fidelity term and GLR, that is a function of noise variance in an unsupervised manner. We first estimate noise variance directly from noise-corrupted graph signals using a graph clique detection (GCD) procedure that discovers locally constant regions. We then compute an optimal $\mu$ minimizing an approximate mean square error function via bias-variance analysis. Experimental results from collected USDA data show that using denoised features as input, performance of a crop yield prediction model can be improved noticeably.
Manifold Graph Signal Restoration using Gradient Graph Laplacian Regularizer
Jun 09, 2022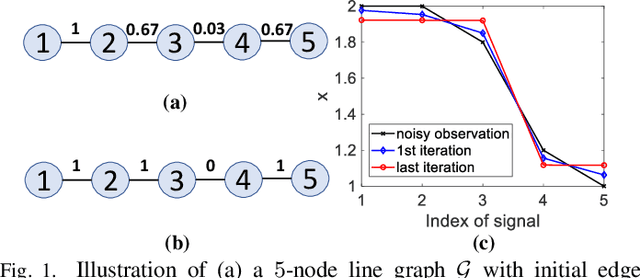
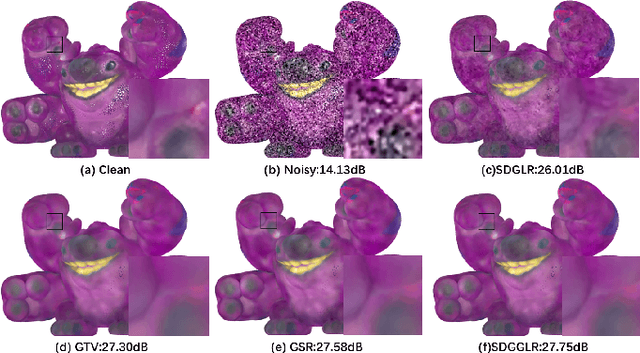
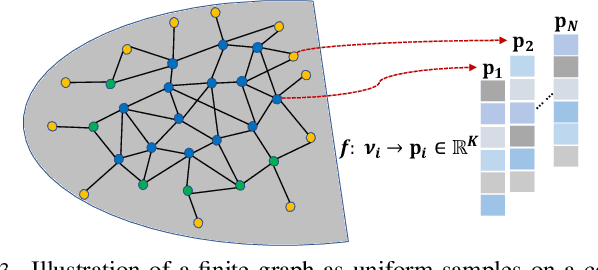
In the graph signal processing (GSP) literature, graph Laplacian regularizer (GLR) was used for signal restoration to promote smooth reconstructions with respect to the underlying graph -- typically signals that are (piecewise) constant. However, for graph signals that are (piecewise) planar, GLR may suffer from the well-known "staircase" effect. In this paper, focusing on manifold graphs -- sets of uniform discrete samples on low-dimensional continuous manifolds -- we generalize GLR to gradient graph Laplacian regularizer (GGLR) that provably promotes piecewise planar (PWP) signal reconstruction. Specifically, for a graph endowed with latent space coordinates (e.g., 2D images, 3D point clouds), we first define a gradient operator, using which we construct a higher-order gradient graph for the computed gradients in each latent dimension. This maps to a gradient-induced nodal graph (GNG) and a Laplacian matrix for a signed graph that is provably positive semi-definite (PSD), thus suitable for quadratic regularization. For manifold graphs without explicit latent coordinates, we propose a fast parameter-free spectral method to first compute latent space coordinates for graph nodes based on generalized eigenvectors. We derive the means-square-error minimizing weight parameter for GGLR efficiently, trading off bias and variance of the signal estimate. Experimental results show that GGLR outperformed previous graph signal priors like GLR and graph total variation (GTV) in a range of graph signal restoration tasks.