 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCAD-Driven Co-Design for Flight-Ready Jet-Powered Humanoids
Sep 18, 2025This paper presents a CAD-driven co-design framework for optimizing jet-powered aerial humanoid robots to execute dynamically constrained trajectories. Starting from the iRonCub-Mk3 model, a Design of Experiments (DoE) approach is used to generate 5,000 geometrically varied and mechanically feasible designs by modifying limb dimensions, jet interface geometry (e.g., angle and offset), and overall mass distribution. Each model is constructed through CAD assemblies to ensure structural validity and compatibility with simulation tools. To reduce computational cost and enable parameter sensitivity analysis, the models are clustered using K-means, with representative centroids selected for evaluation. A minimum-jerk trajectory is used to assess flight performance, providing position and velocity references for a momentum-based linearized Model Predictive Control (MPC) strategy. A multi-objective optimization is then conducted using the NSGA-II algorithm, jointly exploring the space of design centroids and MPC gain parameters. The objectives are to minimize trajectory tracking error and mechanical energy expenditure. The framework outputs a set of flight-ready humanoid configurations with validated control parameters, offering a structured method for selecting and implementing feasible aerial humanoid designs.
From CAD to URDF: Co-Design of a Jet-Powered Humanoid Robot Including CAD Geometry
Oct 11, 2024



Co-design optimization strategies usually rely on simplified robot models extracted from CAD. While these models are useful for optimizing geometrical and inertial parameters for robot control, they might overlook important details essential for prototyping the optimized mechanical design. For instance, they may not account for mechanical stresses exerted on the optimized geometries and the complexity of assembly-level design. In this paper, we introduce a co-design framework aimed at improving both the control performance and mechanical design of our robot. Specifically, we identify the robot links that significantly influence control performance. The geometric characteristics of these links are parameterized and optimized using a multi-objective evolutionary algorithm to achieve optimal control performance. Additionally, an automated Finite Element Method (FEM) analysis is integrated into the framework to filter solutions not satisfying the required structural safety margin. We validate the framework by applying it to enhance the mechanical design for flight performance of the jet-powered humanoid robot iRonCub.
Fron CAD to URDF: Co-Design of a Jet-Powered Humanoid Robot Including CAD Geometry
Oct 10, 2024Co-design optimization strategies usually rely on simplified robot models extracted from CAD. While these models are useful for optimizing geometrical and inertial parameters for robot control, they might overlook important details essential for prototyping the optimized mechanical design. For instance, they may not account for mechanical stresses exerted on the optimized geometries and the complexity of assembly-level design. In this paper, we introduce a co-design framework aimed at improving both the control performance and mechanical design of our robot. Specifically, we identify the robot links that significantly influence control performance. The geometric characteristics of these links are parameterized and optimized using a multi-objective evolutionary algorithm to achieve optimal control performance. Additionally, an automated Finite Element Method (FEM) analysis is integrated into the framework to filter solutions not satisfying the required structural safety margin. We validate the framework by applying it to enhance the mechanical design for flight performance of the jet-powered humanoid robot iRonCub.
Nonlinear In-situ Calibration of Strain-Gauge Force/Torque Sensors for Humanoid Robots
Dec 15, 2023



High force/torque (F/T) sensor calibration accuracy is crucial to achieving successful force estimation/control tasks with humanoid robots. State-of-the-art affine calibration models do not always approximate correctly the physical phenomenon of the sensor/transducer, resulting in inaccurate F/T measurements for specific applications such as thrust estimation of a jet-powered humanoid robot. This paper proposes and validates nonlinear polynomial models for F/T calibration, increasing the number of model coefficients to minimize the estimation residuals. The analysis of several models, based on the data collected from experiments with the iCub3 robot, shows a significant improvement in minimizing the force/torque estimation error when using higher-degree polynomials. In particular, when using a 4th-degree polynomial model, the Root Mean Square error (RMSE) decreased to 2.28N from the 4.58N obtained with an affine model, and the absolute error in the forces remained under 6N while it was reaching up to 16N with the affine model.
Nonlinear Model Identification and Observer Design for Thrust Estimation of Small-scale Turbojet Engines
May 17, 2022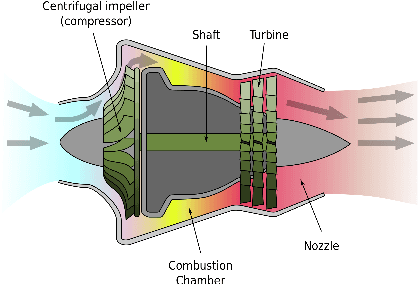
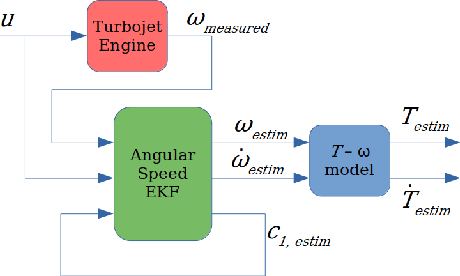
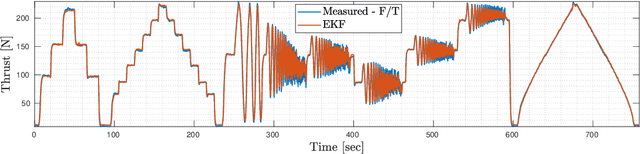
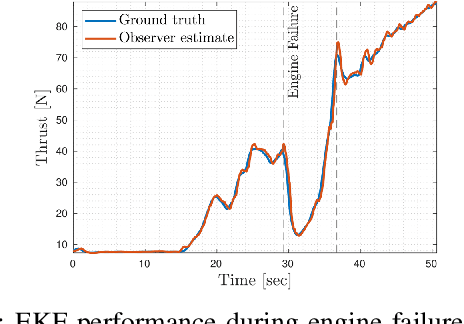
Jet-powered vertical takeoff and landing (VTOL) drones require precise thrust estimation to ensure adequate stability margins and robust maneuvering. Small-scale turbojets have become good candidates for powering heavy aerial drones. However, due to limited instrumentation available in these turbojets, estimating the precise thrust using classical techniques is not straightforward. In this paper, we present a methodology to accurately estimate the online thrust for the small-scale turbojets used on the iRonCub - an aerial humanoid robot. We use a grey-box method to capture the turbojet system dynamics with a nonlinear state-space model based on the data acquired from a custom engine test bench. This model is then used to design an extended Kalman filter that estimates the turbojet thrust only from the angular speed measurements. We exploited the parameter estimation algorithm to ensure that the EKF gives smooth and accurate estimates even at engine failures. The designed EKF was validated on the test bench where the mean absolute error in estimated thrust was found to be within 2% of rated peak thrust.