 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModular meta-learning in abstract graph networks for combinatorial generalization
Dec 19, 2018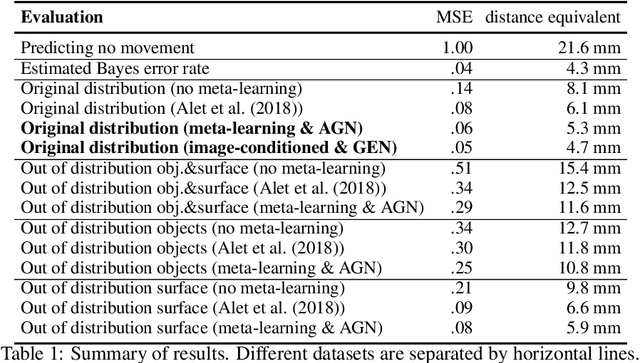

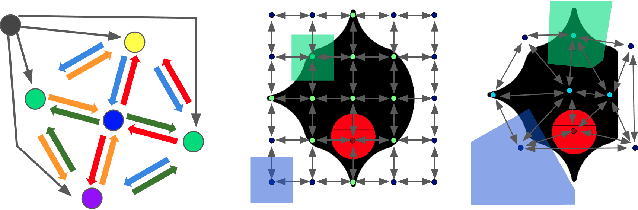
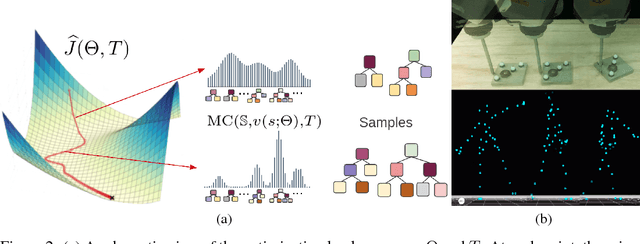
Modular meta-learning is a new framework that generalizes to unseen datasets by combining a small set of neural modules in different ways. In this work we propose abstract graph networks: using graphs as abstractions of a system's subparts without a fixed assignment of nodes to system subparts, for which we would need supervision. We combine this idea with modular meta-learning to get a flexible framework with combinatorial generalization to new tasks built in. We then use it to model the pushing of arbitrarily shaped objects from little or no training data.
Modular meta-learning
Jun 26, 2018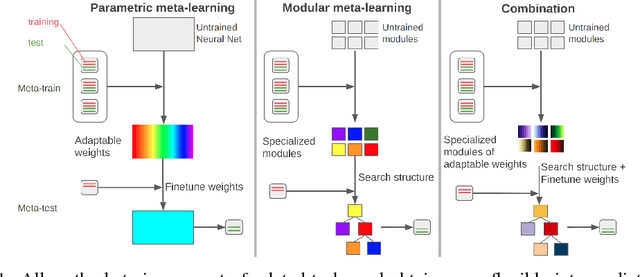
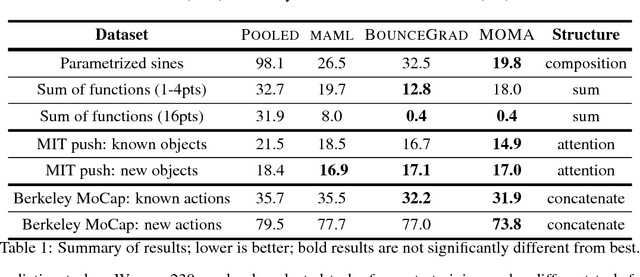
Many prediction problems, such as those that arise in the context of robotics, have a simplifying underlying structure that could accelerate learning. In this paper, we present a strategy for learning a set of neural network modules that can be combined in different ways. We train different modular structures on a set of related tasks and generalize to new tasks by composing the learned modules in new ways. We show this improves performance in two robotics-related problems.
Finding Frequent Entities in Continuous Data
May 08, 2018
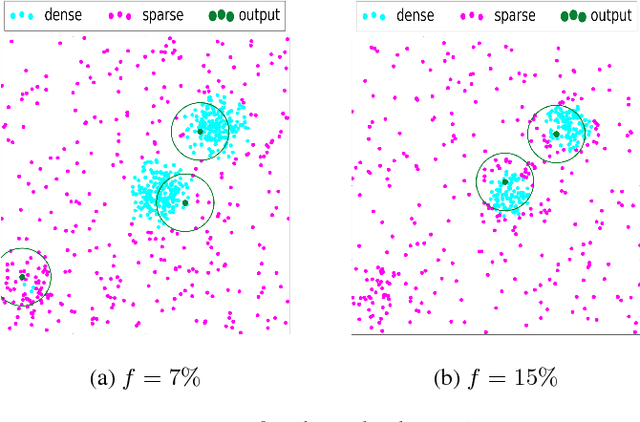
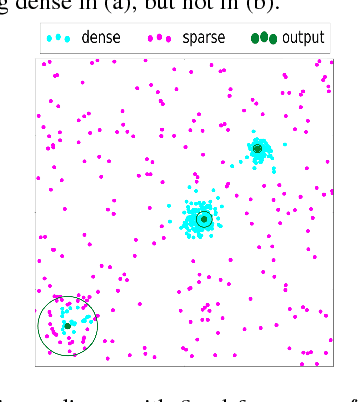

In many applications that involve processing high-dimensional data, it is important to identify a small set of entities that account for a significant fraction of detections. Rather than formalize this as a clustering problem, in which all detections must be grouped into hard or soft categories, we formalize it as an instance of the frequent items or heavy hitters problem, which finds groups of tightly clustered objects that have a high density in the feature space. We show that the heavy hitters formulation generates solutions that are more accurate and effective than the clustering formulation. In addition, we present a novel online algorithm for heavy hitters, called HAC, which addresses problems in continuous space, and demonstrate its effectiveness on real video and household domains.
Robotic Pick-and-Place of Novel Objects in Clutter with Multi-Affordance Grasping and Cross-Domain Image Matching
Apr 01, 2018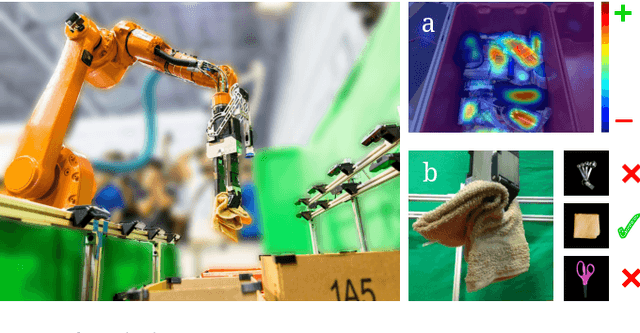
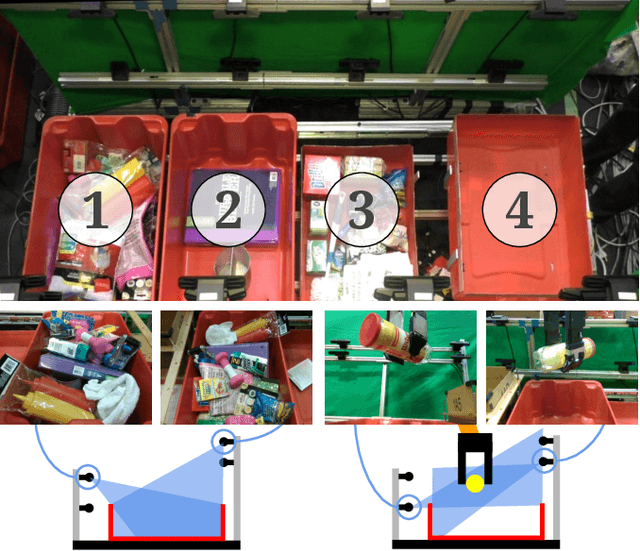
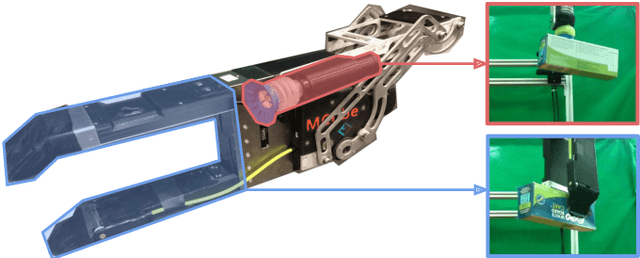
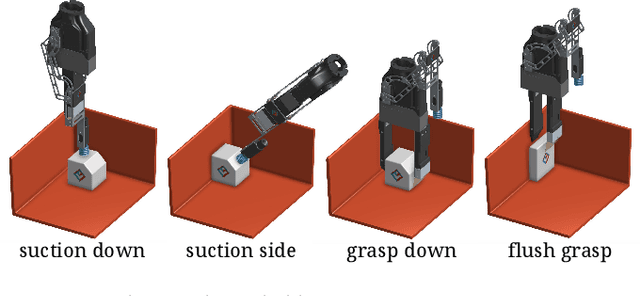
This paper presents a robotic pick-and-place system that is capable of grasping and recognizing both known and novel objects in cluttered environments. The key new feature of the system is that it handles a wide range of object categories without needing any task-specific training data for novel objects. To achieve this, it first uses a category-agnostic affordance prediction algorithm to select and execute among four different grasping primitive behaviors. It then recognizes picked objects with a cross-domain image classification framework that matches observed images to product images. Since product images are readily available for a wide range of objects (e.g., from the web), the system works out-of-the-box for novel objects without requiring any additional training data. Exhaustive experimental results demonstrate that our multi-affordance grasping achieves high success rates for a wide variety of objects in clutter, and our recognition algorithm achieves high accuracy for both known and novel grasped objects. The approach was part of the MIT-Princeton Team system that took 1st place in the stowing task at the 2017 Amazon Robotics Challenge. All code, datasets, and pre-trained models are available online at http://arc.cs.princeton.edu