 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimulating the Unseen: Crash Prediction Must Learn from What Did Not Happen
May 27, 2025Traffic safety science has long been hindered by a fundamental data paradox: the crashes we most wish to prevent are precisely those events we rarely observe. Existing crash-frequency models and surrogate safety metrics rely heavily on sparse, noisy, and under-reported records, while even sophisticated, high-fidelity simulations undersample the long-tailed situations that trigger catastrophic outcomes such as fatalities. We argue that the path to achieving Vision Zero, i.e., the complete elimination of traffic fatalities and severe injuries, requires a paradigm shift from traditional crash-only learning to a new form of counterfactual safety learning: reasoning not only about what happened, but also about the vast set of plausible yet perilous scenarios that could have happened under slightly different circumstances. To operationalize this shift, our proposed agenda bridges macro to micro. Guided by crash-rate priors, generative scene engines, diverse driver models, and causal learning, near-miss events are synthesized and explained. A crash-focused digital twin testbed links micro scenes to macro patterns, while a multi-objective validator ensures that simulations maintain statistical realism. This pipeline transforms sparse crash data into rich signals for crash prediction, enabling the stress-testing of vehicles, roads, and policies before deployment. By learning from crashes that almost happened, we can shift traffic safety from reactive forensics to proactive prevention, advancing Vision Zero.
AI2-Active Safety: AI-enabled Interaction-aware Active Safety Analysis with Vehicle Dynamics
May 01, 2025This paper introduces an AI-enabled, interaction-aware active safety analysis framework that accounts for groupwise vehicle interactions. Specifically, the framework employs a bicycle model-augmented with road gradient considerations-to accurately capture vehicle dynamics. In parallel, a hypergraph-based AI model is developed to predict probabilistic trajectories of ambient traffic. By integrating these two components, the framework derives vehicle intra-spacing over a 3D road surface as the solution of a stochastic ordinary differential equation, yielding high-fidelity surrogate safety measures such as time-to-collision (TTC). To demonstrate its effectiveness, the framework is analyzed using stochastic numerical methods comprising 4th-order Runge-Kutta integration and AI inference, generating probability-weighted high-fidelity TTC (HF-TTC) distributions that reflect complex multi-agent maneuvers and behavioral uncertainties. Evaluated with HF-TTC against traditional constant-velocity TTC and non-interaction-aware approaches on highway datasets, the proposed framework offers a systematic methodology for active safety analysis with enhanced potential for improving safety perception in complex traffic environments.
Virtual Roads, Smarter Safety: A Digital Twin Framework for Mixed Autonomous Traffic Safety Analysis
Apr 24, 2025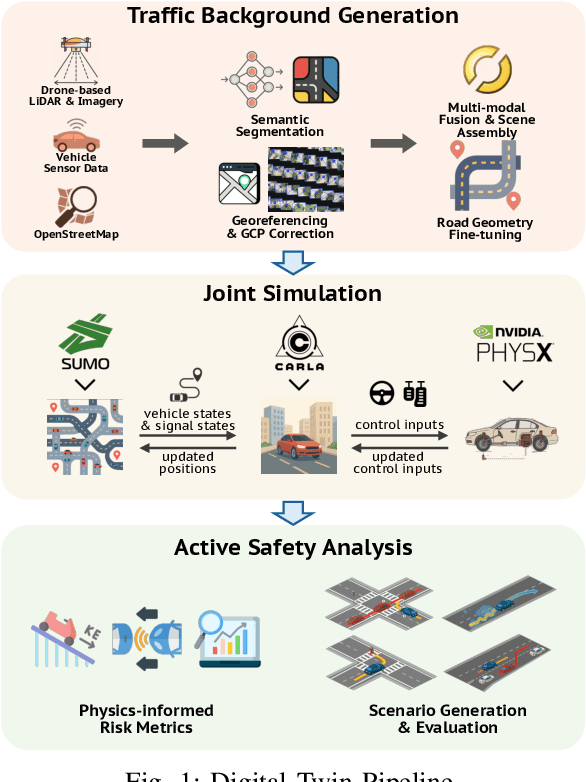
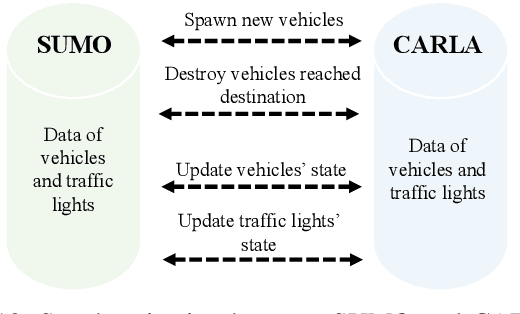
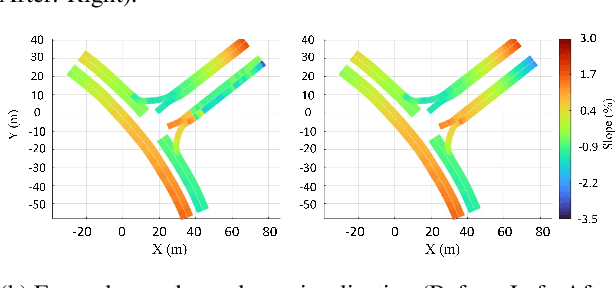
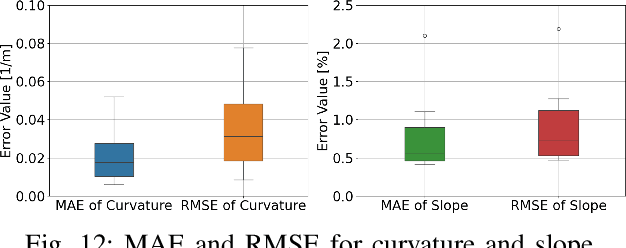
This paper presents a digital-twin platform for active safety analysis in mixed traffic environments. The platform is built using a multi-modal data-enabled traffic environment constructed from drone-based aerial LiDAR, OpenStreetMap, and vehicle sensor data (e.g., GPS and inclinometer readings). High-resolution 3D road geometries are generated through AI-powered semantic segmentation and georeferencing of aerial LiDAR data. To simulate real-world driving scenarios, the platform integrates the CAR Learning to Act (CARLA) simulator, Simulation of Urban MObility (SUMO) traffic model, and NVIDIA PhysX vehicle dynamics engine. CARLA provides detailed micro-level sensor and perception data, while SUMO manages macro-level traffic flow. NVIDIA PhysX enables accurate modeling of vehicle behaviors under diverse conditions, accounting for mass distribution, tire friction, and center of mass. This integrated system supports high-fidelity simulations that capture the complex interactions between autonomous and conventional vehicles. Experimental results demonstrate the platform's ability to reproduce realistic vehicle dynamics and traffic scenarios, enhancing the analysis of active safety measures. Overall, the proposed framework advances traffic safety research by enabling in-depth, physics-informed evaluation of vehicle behavior in dynamic and heterogeneous traffic environments.
Hypergraph-based Motion Generation with Multi-modal Interaction Relational Reasoning
Sep 18, 2024The intricate nature of real-world driving environments, characterized by dynamic and diverse interactions among multiple vehicles and their possible future states, presents considerable challenges in accurately predicting the motion states of vehicles and handling the uncertainty inherent in the predictions. Addressing these challenges requires comprehensive modeling and reasoning to capture the implicit relations among vehicles and the corresponding diverse behaviors. This research introduces an integrated framework for autonomous vehicles (AVs) motion prediction to address these complexities, utilizing a novel Relational Hypergraph Interaction-informed Neural mOtion generator (RHINO). RHINO leverages hypergraph-based relational reasoning by integrating a multi-scale hypergraph neural network to model group-wise interactions among multiple vehicles and their multi-modal driving behaviors, thereby enhancing motion prediction accuracy and reliability. Experimental validation using real-world datasets demonstrates the superior performance of this framework in improving predictive accuracy and fostering socially aware automated driving in dynamic traffic scenarios.