 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVirtual Roads, Smarter Safety: A Digital Twin Framework for Mixed Autonomous Traffic Safety Analysis
Apr 24, 2025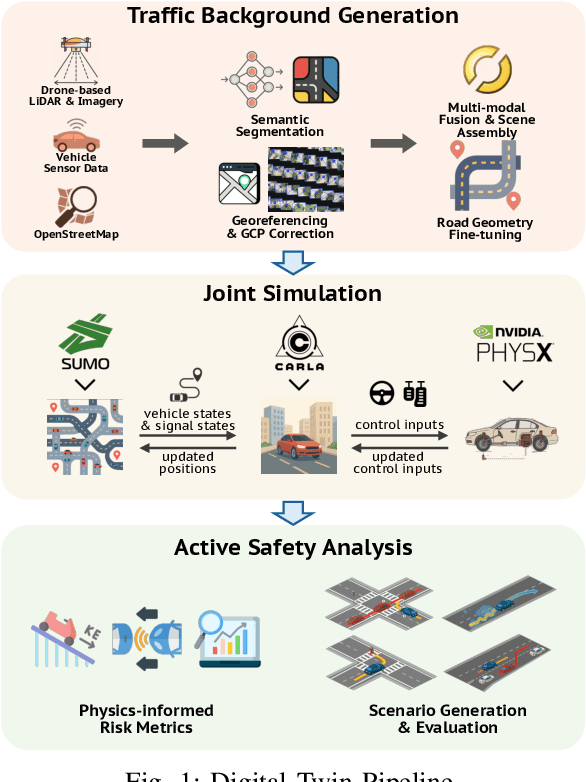
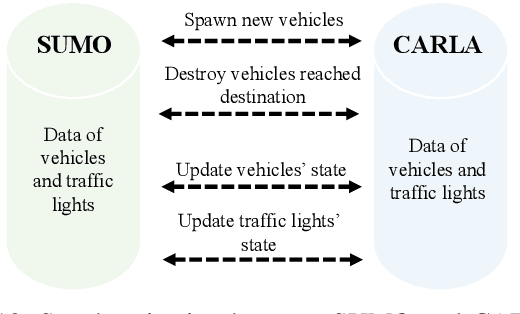
This paper presents a digital-twin platform for active safety analysis in mixed traffic environments. The platform is built using a multi-modal data-enabled traffic environment constructed from drone-based aerial LiDAR, OpenStreetMap, and vehicle sensor data (e.g., GPS and inclinometer readings). High-resolution 3D road geometries are generated through AI-powered semantic segmentation and georeferencing of aerial LiDAR data. To simulate real-world driving scenarios, the platform integrates the CAR Learning to Act (CARLA) simulator, Simulation of Urban MObility (SUMO) traffic model, and NVIDIA PhysX vehicle dynamics engine. CARLA provides detailed micro-level sensor and perception data, while SUMO manages macro-level traffic flow. NVIDIA PhysX enables accurate modeling of vehicle behaviors under diverse conditions, accounting for mass distribution, tire friction, and center of mass. This integrated system supports high-fidelity simulations that capture the complex interactions between autonomous and conventional vehicles. Experimental results demonstrate the platform's ability to reproduce realistic vehicle dynamics and traffic scenarios, enhancing the analysis of active safety measures. Overall, the proposed framework advances traffic safety research by enabling in-depth, physics-informed evaluation of vehicle behavior in dynamic and heterogeneous traffic environments.