 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDT-BEHRT: Disease Trajectory-aware Transformer for Interpretable Patient Representation Learning
Mar 10, 2026The growing adoption of electronic health record (EHR) systems has provided unprecedented opportunities for predictive modeling to guide clinical decision making. Structured EHRs contain longitudinal observations of patients across hospital visits, where each visit is represented by a set of medical codes. While sequence-based, graph-based, and graph-enhanced sequence approaches have been developed to capture rich code interactions over time or within the same visits, they often overlook the inherent heterogeneous roles of medical codes arising from distinct clinical characteristics and contexts. To this end, in this study we propose the Disease Trajectory-aware Transformer for EHR (DT-BEHRT), a graph-enhanced sequential architecture that disentangles disease trajectories by explicitly modeling diagnosis-centric interactions within organ systems and capturing asynchronous progression patterns. To further enhance the representation robustness, we design a tailored pre-training methodology that combines trajectory-level code masking with ontology-informed ancestor prediction, promoting semantic alignment across multiple modeling modules. Extensive experiments on multiple benchmark datasets demonstrate that DT-BEHRT achieves strong predictive performance and provides interpretable patient representations that align with clinicians' disease-centered reasoning. The source code is publicly accessible at https://github.com/GatorAIM/DT-BEHRT.git.
ExoGS: A 4D Real-to-Sim-to-Real Framework for Scalable Manipulation Data Collection
Jan 26, 2026Real-to-Sim-to-Real technique is gaining increasing interest for robotic manipulation, as it can generate scalable data in simulation while having narrower sim-to-real gap. However, previous methods mainly focused on environment-level visual real-to-sim transfer, ignoring the transfer of interactions, which could be challenging and inefficient to obtain purely in simulation especially for contact-rich tasks. We propose ExoGS, a robot-free 4D Real-to-Sim-to-Real framework that captures both static environments and dynamic interactions in the real world and transfers them seamlessly to a simulated environment. It provides a new solution for scalable manipulation data collection and policy learning. ExoGS employs a self-designed robot-isomorphic passive exoskeleton AirExo-3 to capture kinematically consistent trajectories with millimeter-level accuracy and synchronized RGB observations during direct human demonstrations. The robot, objects, and environment are reconstructed as editable 3D Gaussian Splatting assets, enabling geometry-consistent replay and large-scale data augmentation. Additionally, a lightweight Mask Adapter injects instance-level semantics into the policy to enhance robustness under visual domain shifts. Real-world experiments demonstrate that ExoGS significantly improves data efficiency and policy generalization compared to teleoperation-based baselines. Code and hardware files have been released on https://github.com/zaixiabalala/ExoGS.
Position-enhanced and Time-aware Graph Convolutional Network for Sequential Recommendations
Jul 12, 2021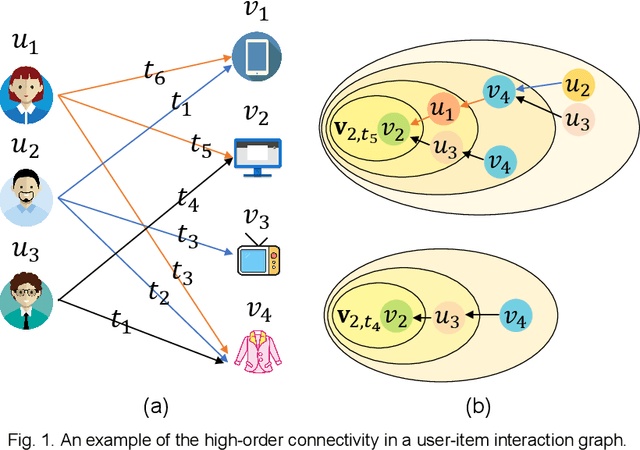
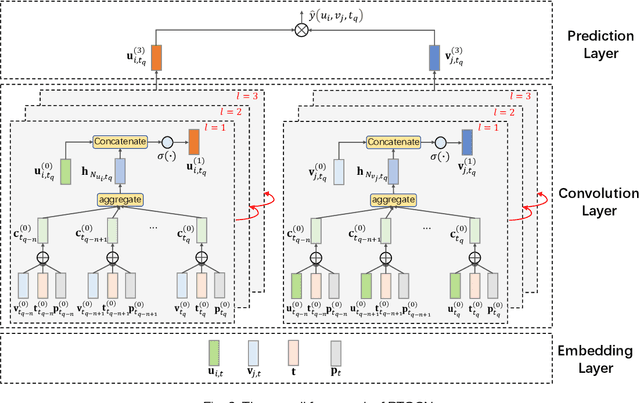

Most of the existing deep learning-based sequential recommendation approaches utilize the recurrent neural network architecture or self-attention to model the sequential patterns and temporal influence among a user's historical behavior and learn the user's preference at a specific time. However, these methods have two main drawbacks. First, they focus on modeling users' dynamic states from a user-centric perspective and always neglect the dynamics of items over time. Second, most of them deal with only the first-order user-item interactions and do not consider the high-order connectivity between users and items, which has recently been proved helpful for the sequential recommendation. To address the above problems, in this article, we attempt to model user-item interactions by a bipartite graph structure and propose a new recommendation approach based on a Position-enhanced and Time-aware Graph Convolutional Network (PTGCN) for the sequential recommendation. PTGCN models the sequential patterns and temporal dynamics between user-item interactions by defining a position-enhanced and time-aware graph convolution operation and learning the dynamic representations of users and items simultaneously on the bipartite graph with a self-attention aggregator. Also, it realizes the high-order connectivity between users and items by stacking multi-layer graph convolutions. To demonstrate the effectiveness of PTGCN, we carried out a comprehensive evaluation of PTGCN on three real-world datasets of different sizes compared with a few competitive baselines. Experimental results indicate that PTGCN outperforms several state-of-the-art models in terms of two commonly-used evaluation metrics for ranking.