 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIndoor 60 GHz Radio Channel Dataset Enabling Digital Twin Construction
May 07, 2026The ambitious performance targets of modern wireless networks, including 6G and Industrial IoT (IIoT) systems, necessitate advanced hardware platforms utilizing millimeter-wave (mmWave) technology. High-frequency signals provide the bandwidth and low latency required for these systems, but rely on beamforming to overcome path loss and exploit channel sparsity. This kind of architecture provides all the specifications needed to build a SLAM (Simultaneous Localization and Mapping) system. This paper presents a dataset based on a validated, high-performance testbed integrating a Xilinx Zynq UltraScale+ RFSoC with a Sivers 60 GHz beamforming front-end. We demonstrate a novel methodology using segment-scrambled, quasi-orthogonal chirp waveforms to perform rapid exhaustive beamspace sampling. The system is integrated with Pynq Linux for real-time control and high-speed waveform upload. We present a high-density spatial dataset consisting of 350 measurement points across a 1.95 m x 3.60 m indoor grid. We exploited the system's ability to scan 63 transmit directions and construct a complete 63x63 beamspace intensity map in 200us. This dataset serves as a benchmark for spatial channel modeling, Digital Twins and Integrated Sensing and Communication (ISAC) research.
Trade-Offs in FMCW Radar-Based Respiration and Heart Rate Variability
Mar 10, 2026This study presents a comprehensive experimental assessment of a low-cost frequency-modulated continuous-wave (FMCW) multiple-input multiple-output (MIMO) radar for non-contact vital sign monitoring, focusing on respiratory rate (RR) and heart rate (HR) estimation. The influence of sensing distance and number of transmitted chirps on measurement accuracy is systematically quantified. Results exhibit a U-shaped error profile with optimal performance near $70~cm$, achieving mean absolute errors of $0.8~bpm$ for RR and $3.2~bpm$ for HR. Accuracy deteriorates at short ($<60~cm$) and long ($>100~cm$) distances due to multipath, near-field, and signal-to-noise effects. Increasing chirp count enhances performance: RR errors converge asymptotically for $\geq96$ chirps, while HR requires at least 96 chirps for stable detection. Variability metrics, including heart and respiratory rate variability, remain less accurate ($>15$--$30\%$ error), indicating limited capability in capturing instantaneous fluctuations. These findings define a fundamental trade-off: the radar ensures robust estimation of average RR and HR but exhibits restricted precision in high-resolution beat-to-beat and breath-to-breath monitoring.
Digital Twin-Based Beamforming for Interference Mitigation in AF Relay MIMO Systems
Feb 26, 2026Beamforming in multiple-input multiple-output (MIMO) systems should take interference mitigation into account. However, for beamform design, accurate channel state information (CSI) is needed, which is often difficult to obtain due to channel variability, feedback overhead, or hardware constraints. For example, amplify-and-forward (AF) relays passively forward signals without measurement, precluding full CSI acquisition to and from the relay. To address these issues, this paper introduces a novel prediction-assisted optimization (PAO) framework for beamform design in AF relay-assisted multiuser MIMO systems. The proposed solution in the AF relay aims at maximizing the signal-plus-interference-to-noise ratio (SINR). Unlike other methods, PAO relies solely on received power measurements, making it suitable for scenarios where CSI is unreliable or unavailable. PAO consists of two stages: a supervised-learning-based neural network (NN) that predicts the positions of transmitters using signal observations, and an optimization algorithm, guided by a digital twin (DT), that iteratively refines the beam direction of the relay in a simulated radio environment. As a key contribution, we validate the proposed framework using realistic measurements collected on a custom-built experimental millimeter wave (mmWave) platform, which enables training of the NN model under practical wireless conditions. The estimated information is then used to update the digital twin with knowledge of the surrounding environment, enabling online optimization. Numerical results show the trade-off between localization accuracy and beamforming performance and confirm that PAO maintains robustness even in the presence of localization errors while reducing the need for real-world measurements.
CoBA: Integrated Deep Learning Model for Reliable Low-Altitude UAV Classification in mmWave Radio Networks
Jan 28, 2026Uncrewed Aerial Vehicles (UAVs) are increasingly used in civilian and industrial applications, making secure low-altitude operations crucial. In dense mmWave environments, accurately classifying low-altitude UAVs as either inside authorized or restricted airspaces remains challenging, requiring models that handle complex propagation and signal variability. This paper proposes a deep learning model, referred to as CoBA, which stands for integrated Convolutional Neural Network (CNN), Bidirectional Long Short-Term Memory (BiLSTM), and Attention which leverages Fifth Generation (5G) millimeter-wave (mmWave) radio measurements to classify UAV operations in authorized and restricted airspaces at low altitude. The proposed CoBA model integrates convolutional, bidirectional recurrent, and attention layers to capture both spatial and temporal patterns in UAV radio measurements. To validate the model, a dedicated dataset is collected using the 5G mmWave network at TalTech, with controlled low altitude UAV flights in authorized and restricted scenarios. The model is evaluated against conventional ML models and a fingerprinting-based benchmark. Experimental results show that CoBA achieves superior accuracy, significantly outperforming all baseline models and demonstrating its potential for reliable and regulated UAV airspace monitoring.
Enabling NLOS Imaging Capabilities at the Initial Access of 6G Base Stations
Nov 19, 2025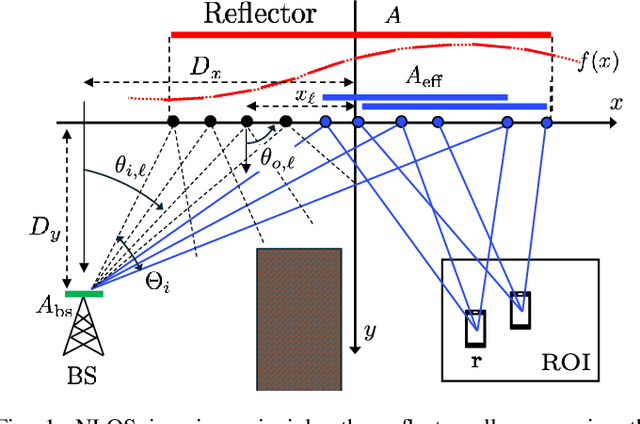
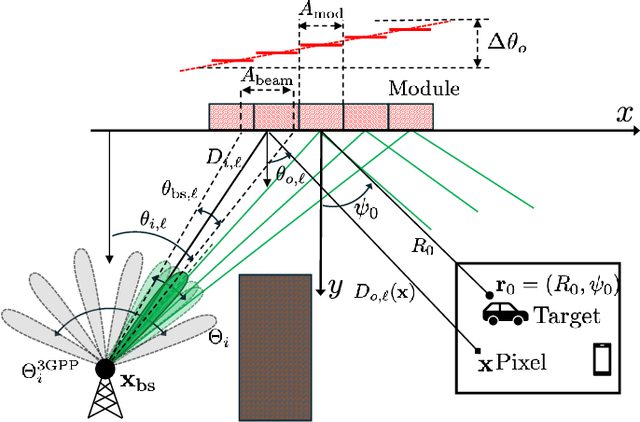
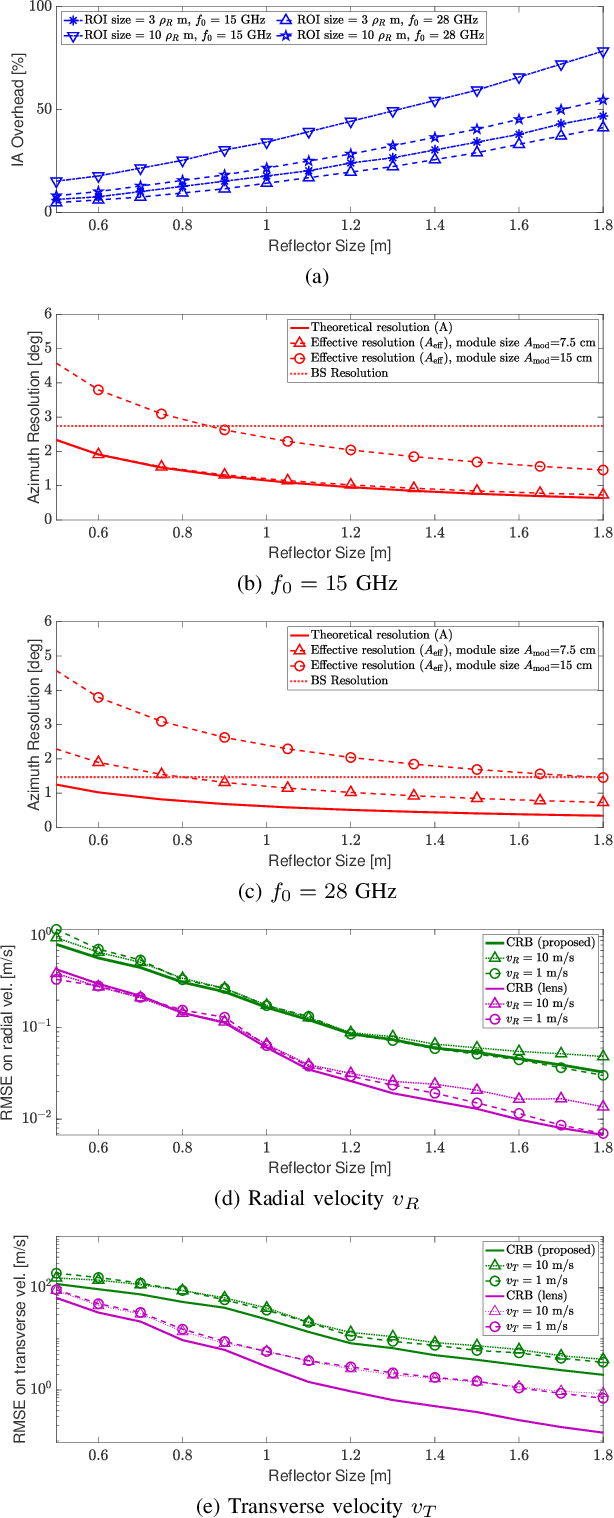
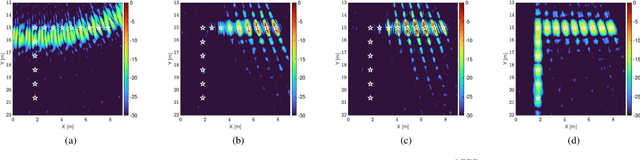
Sensing in non-line-of-sight (NLOS) is one of the major challenges for integrated sensing and communication systems. Existing countermeasures for NLOS either use prior knowledge on the environment to characterize all the multiple bounces or deploy anomalous reflectors in the environment to enable communication infrastructure to ''\textit{see behind the corner}''. This work addresses the integration of monostatic NLOS imaging functionalities into the initial access (IA) procedure of a next generation base station (BS), by means of a non-reconfigurable modular reflector. During standard-compliant IA, the BS sweeps a narrow beam using a pre-defined dedicated codebook to achieve the beam alignment with users. We introduce the imaging functionality by enhancing such codebook with imaging-specific entries that are jointly designed with the angular configuration of the modular reflector to enable high-resolution imaging of a region in NLOS by \textit{coherently} processing all the echoes at the BS. We derive closed-form expressions for the near-field (NF) spatial resolution, as well as for the \textit{effective aperture} (i.e., the portion of the reflector that actively contributes to improve image resolution). The problem of imaging of moving targets in NLOS is also addressed, and we propose a maximum-likelihood estimation for target's velocity in NF and related theoretical bound. Further, we discuss and quantify the inherent communication-imaging performance trade-offs and related system design challenges through numerical simulations. Finally, the proposed imaging method employing modular reflectors is validated both numerically and experimentally, showing the effectiveness of our concept.
Autonomous Sensing UAV for Accurate Multi-User Identification and Localization in Cellular Networks
Nov 17, 2025This paper presents an autonomous sensing frame- work for identifying and localizing multiple users in Fifth Generation (5G) networks using an Unmanned Aerial Vehicle (UAV) that is not part of the serving access network. Unlike conventional aerial serving nodes, the proposed UAV operates passively and is dedicated solely to sensing. It captures Uplink (UL) Sounding Reference Signals (SRS), and requires virtually no coordination with the network infrastructure. A complete signal processing chain is proposed and developed, encompassing synchronization, user identification, and localization, all executed onboard UAV during flight. The system autonomously plans and adapts its mission workflow to estimate multiple user positions within a single deployment, integrating flight control with real-time sensing. Extensive simulations and a full-scale low- altitude experimental campaign validate the approach, showing localization errors below 3 m in rural field tests and below 8 m in urban simulation scenarios, while reliably identifying each user. The results confirm the feasibility of infrastructure-independent sensing UAVs as a core element of the emerging Low Altitude Economy (LAE), supporting situational awareness and rapid deployment in emergency or connectivity-limited environments.
Integrated Sensing and Communication System via Dual-Domain Waveform Superposition
Dec 15, 2022



Integrated Sensing and Communication (ISAC) systems are recognised as one of the key ingredients of the sixth generation (6G) network. A challenging topic in ISAC is the design of a single waveform combining both communication and sensing functionalities on the same time-frequency-space resources, allowing to tune the performance of both with partial or full hardware sharing. This paper proposes a dual-domain waveform design approach that superposes onto the frequency-time (FT) domain both the legacy orthogonal frequency division multiplexing (OFDM) signal and a sensing one, purposely designed in the delay-Doppler domain. With a proper power downscaling of the sensing signal w.r.t. OFDM, it is possible to exceed regulatory bandwidth limitations proper of legacy multicarrier systems to increase the sensing performance while leaving communication substantially unaffected. Numerical and experimental results prove the effectiveness of the dual-domain waveform, notwithstanding a power abatement of at least 30 dB of the signal used for sensing compared to the one used for communication. The dual-domain ISAC waveform outperforms both OFDM and orthogonal time-frequency-space (OTFS) in terms of Cram\'{e}r-Rao bound on delay estimation (up to 20 dB), thanks to its superior resolution, with a negligible penalty on the achievable rate.
Localizing the Vehicle's Antenna: an Open Problem in 6G Network Sensing
Apr 03, 2022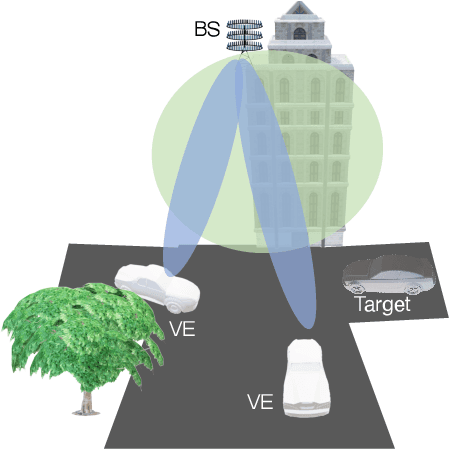
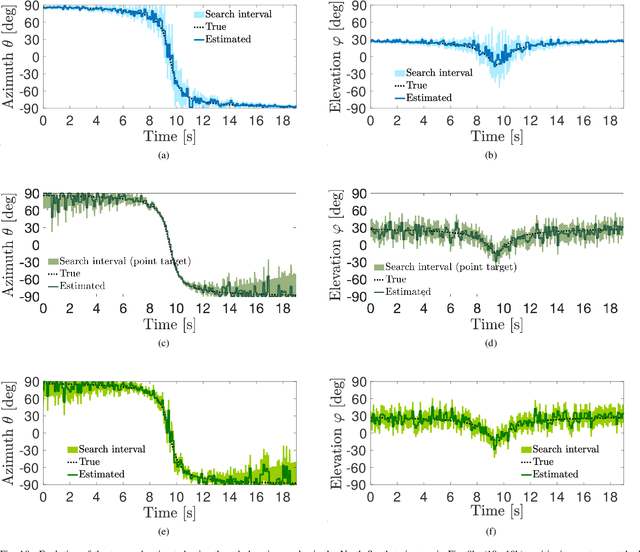
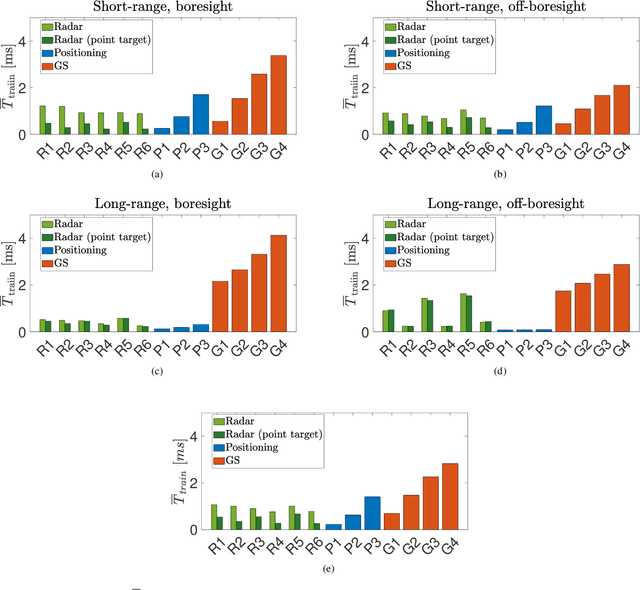
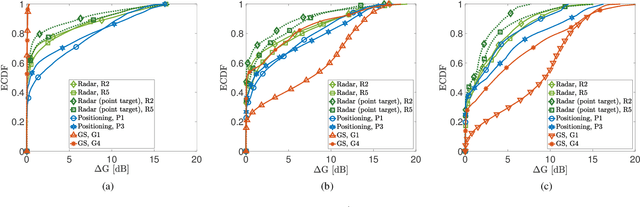
Millimeter Waves (mmW) and sub-THz frequencies are the candidate bands for the upcoming Sixth Generation (6G) of communication systems. The use of collimated beams at mmW/sub-THz to compensate for the increased path and penetration loss arises the need for a seamless Beam Management (BM), especially for high mobility scenarios such as the Vehicle-to-Infrastructure (V2I) one. Recent research advances in Integrated Sensing and Communication (ISAC) indicate that equipping the network infrastructure, e.g., the Base Station (BS), with either a stand-alone radar or sensing capabilities using optimized waveforms, represents the killer technology to facilitate the BM. However, radio sensing should accurately localize the Vehicular Equipment (VE)'s antenna, which is not guaranteed in general. Differently, employing side information from VE's onboard positioning sensors might overcome this limitation at the price of an increased control signaling between VE and BS. This paper provides a pragmatic comparison between radar-assisted and position-assisted BM for mmW V2I systems in a typical urban scenario in terms of BM training time and beamforming gain loss due to a wrong BM decision. Simulation results, supported by experimental evidence, show that the point target approximation of a traveling VE does not hold in practical V2I scenarios with radar-equipped BS. Therefore, the true antenna position has a residual uncertainty that is independent of radar's resolution and implies 50\,\% more BM training time on average. Moreover, there is not a winning technology for BM between BS-mounted radar and VE's onboard positioning systems. They provide complementary performance, depending on position, although outperforming blind BM techniques compared to conventional blind methods. Thus, we propose to optimally combine radar and positioning information in a multi-technology integrated BM solution.