 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEigenMPC: An Eigenmanifold-Inspired Model-Predictive Control Framework for Exciting Efficient Oscillations in Mechanical Systems
Mar 03, 2023



This paper proposes a Nonlinear Model-Predictive Control (NMPC) method capable of finding and converging to energy-efficient regular oscillations, which require no control action to be sustained. The approach builds up on the recently developed Eigenmanifold theory, which defines the sets of line-shaped oscillations of a robot as an invariant two-dimensional submanifold of its state space. By defining the control problem as a nonlinear program (NLP), the controller is able to deal with constraints in the state and control variables and be energy-efficient not only in its final trajectory but also during the convergence phase. An initial implementation of this approach is proposed, analyzed, and tested in simulation.
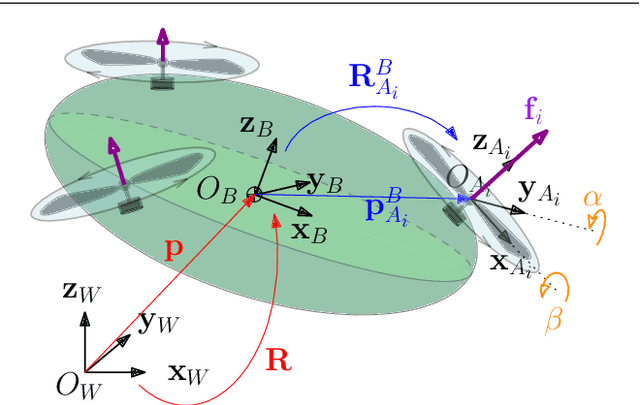
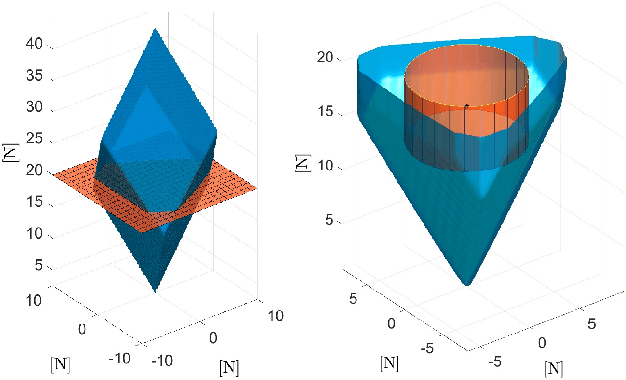
A Perception-Aware NMPC for Vision-Based Target Tracking and Collision Avoidance with a Multi-Rotor UAV
Feb 09, 2023A perception-aware Nonlinear Model Predictive Control (NMPC) strategy aimed at performing vision-based target tracking and collision avoidance with a multi-rotor aerial vehicle is presented in this paper. The proposed control strategy considers both realistic actuation limits at the torque level and visual perception constraints to enforce the visibility coverage of a target while complying with the mission objectives. Furthermore, the approach allows to safely navigate in a workspace area populated by dynamic obstacles with a ballistic motion. The formulation is meant to be generic and set upon a large class of multi-rotor vehicles that covers both coplanar designs like quadrotors as well as fully-actuated platforms with tilted propellers. The feasibility and effectiveness of the control strategy are demonstrated via closed-loop simulations achieved in MATLAB.
* 6 pages, 6 figures, conference
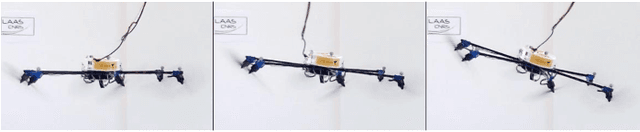
FAST-Hex -- A Morphing Hexarotor: Design, Mechanical Implementation, Control and Experimental Validation
Apr 14, 2020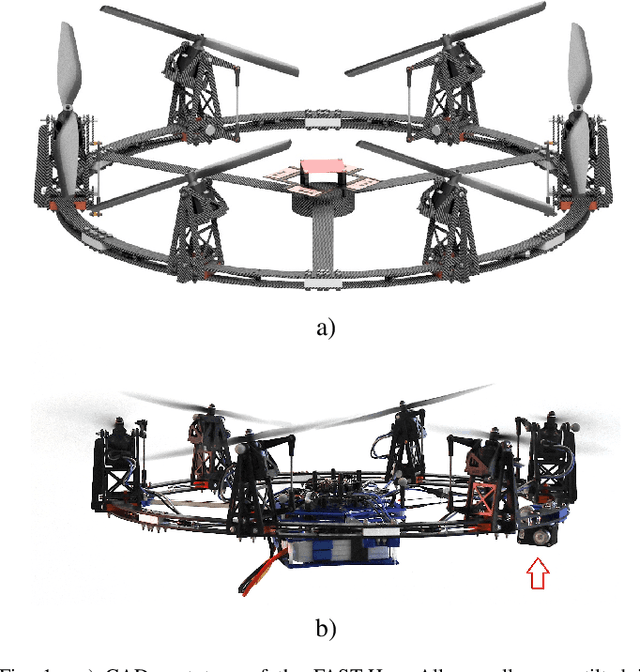
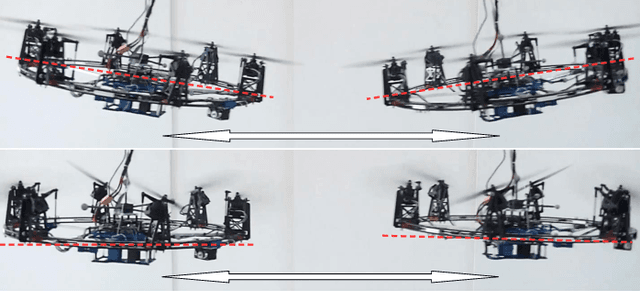
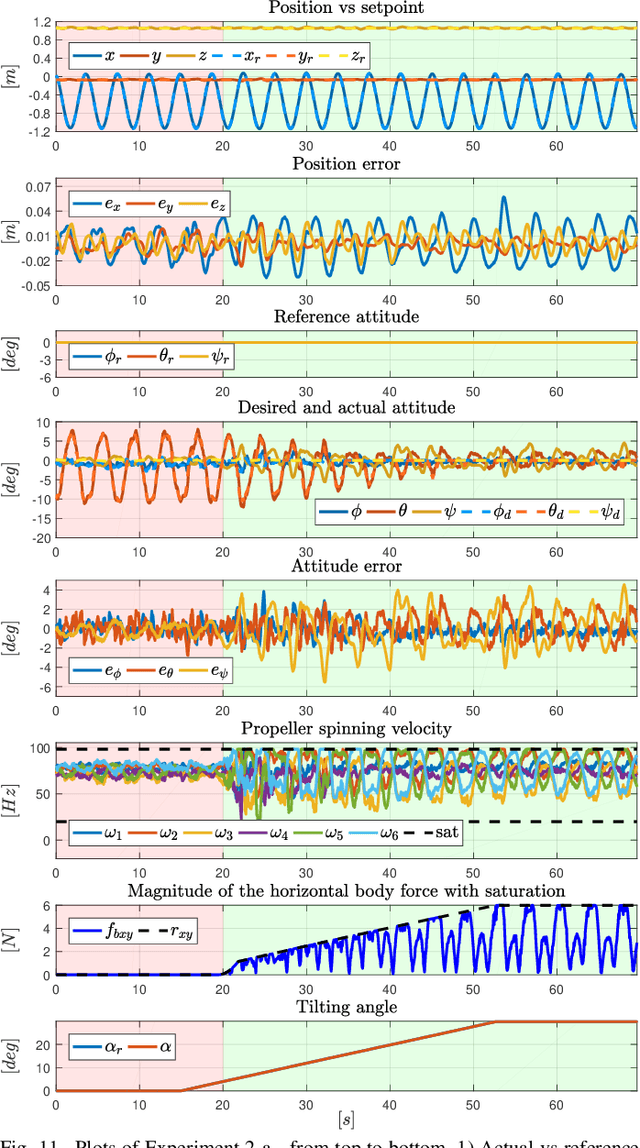

We present FAST-Hex, a micro aerial hexarotor platform that allows to seamlessly transit from an under-actuated to a fully-actuated configuration with only one additional control input, a motor that synchronously tilts all propellers. The FAST-Hex adapts its configuration between the more efficient but under-actuated, collinear multi-rotors and the less efficient, but full-pose-tracking, which is attained by non-collinear multi-rotors. On the basis of prior work on minimal input configurable micro aerial vehicle we mainly stress three aspects: mechanical design, motion control and experimental validation. Specifically, we present the lightweight mechanical structure of the FAST-Hex that allows it to only use one additional input to achieve configurability and full actuation in a vast state space. The motion controller receives as input any reference pose in $\mathbb{R}^3\times \mathrm{SO}(3)$ (3D position + 3D orientation). Full pose tracking is achieved if the reference pose is feasible with respect to actuator constraints. In case of unfeasibility a new feasible desired trajectory is generated online giving priority to the position tracking over the orientation tracking. Finally we present a large set of experimental results shading light on all aspects of the control and pose tracking of FAST-Hex.
Nonlinear Model Predictive Control with Actuator Constraints for Multi-Rotor Aerial Vehicles
Nov 19, 2019
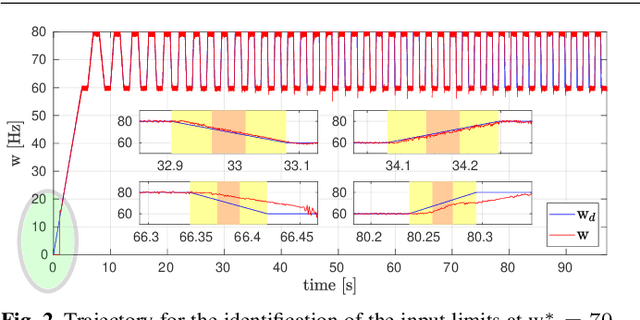
In this paper we propose, test, and validate an online Nonlinear Model Predictive Control (NMPC) method applied to multi-rotor aerial systems with arbitrarily positioned and oriented rotors. This work brings into question some common modeling and control design choices that are typically adopted in order to guarantee robustness and reliability but which may severely limit the attainable performance. In particular the proposed method \emph{does not} resort to common simplifications such as: 1) linear model approximation, 2) cascaded control paradigm used to decouple the translational and the rotational dynamics of the rigid body, and 3) use of low level reactive trackers for stabilization, 4) unconstrained system or use of fictitious constraints. The method addresses simultaneously the problem of local reference trajectory planning and that of stabilizing the vehicle dynamics. Furthermore, by considering as control inputs the derivatives of the forces generated by the multi-rotor vehicle and by means of a novel actuator modeling approach, the method avoids conservative -- and often fictitious -- input/state saturations which are present, e.g., in cascaded approaches. The control algorithm is implemented using a state-of-the-art Real Time Iteration (RTI) scheme with partial sensitivity update method. The performances of the control system are finally validated by means of real-time simulations and in real experiments, with a large spectrum of multi-rotor systems: an \emph{under-actuated} quadrotor, a \emph{fully actuated} hexarotor, a multi-rotor with \emph{orientable} propellers, and a multi-rotor with an unexpected \emph{rotor failure}.
Development of SAM: cable-Suspended Aerial Manipulator
Mar 06, 2019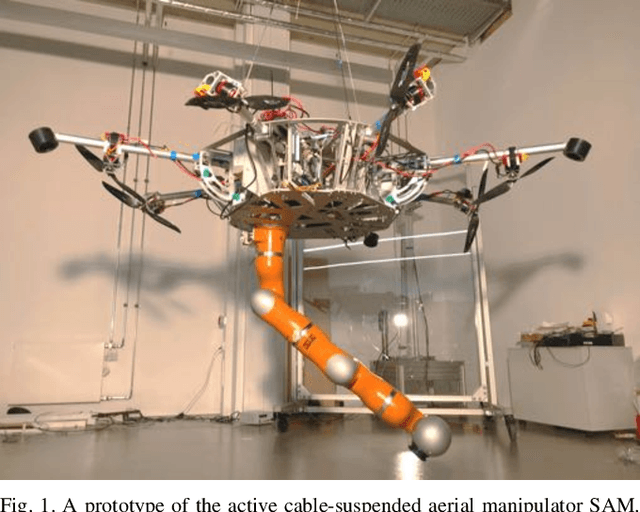
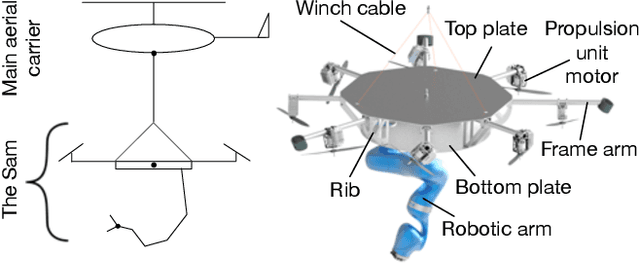
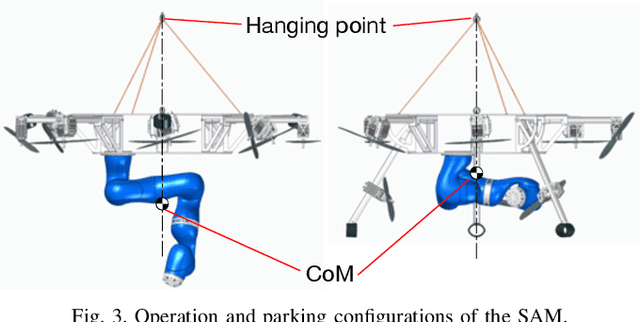

High risk of a collision between rotor blades and the obstacles in a complex environment imposes restrictions on the aerial manipulators. To solve this issue, a novel system cable-Suspended Aerial Manipulator (SAM) is presented in this paper. Instead of attaching a robotic manipulator directly to an aerial carrier, it is mounted on an active platform which is suspended on the carrier by means of a cable. As a result, higher safety can be achieved because the aerial carrier can keep a distance from the obstacles. For self-stabilization, the SAM is equipped with two actuation systems: winches and propulsion units. This paper presents an overview of the SAM including the concept behind, hardware realization, control strategy, and the first experimental results.
Full-Pose Tracking Control for Aerial Robotic Systems with Laterally-Bounded Input Force
May 17, 2017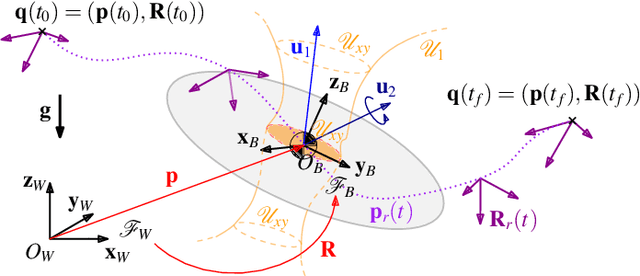
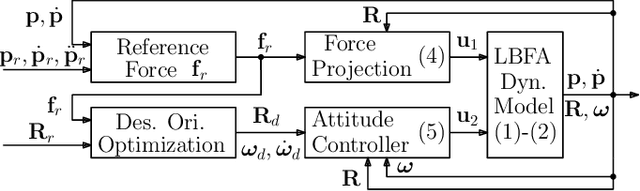
In this paper, we define a general class of abstract aerial robotic systems named Laterally Bounded Force (LBF) vehicles, in which most of the control authority is expressed along a principal thrust direction, while in the lateral directions a (smaller and possibly null) force may be exploited to achieve full-pose tracking. This class approximates well platforms endowed with non-coplanar/non-collinear rotors that can use the tilted propellers to slightly change the orientation of the total thrust w.r.t. the body frame. For this broad class of systems, we introduce a new geometric control strategy in SE(3) to achieve, whenever made possible by the force constraints, the independent tracking of position-plus-orientation trajectories. The exponential tracking of a feasible full-pose reference trajectory is proven using a Lyapunov technique in SE(3). The method can deal seamlessly with both under- and fully-actuated LBF platforms. The controller guarantees the tracking of at least the positional part in the case that an unfeasible full-pose reference trajectory is provided. The paper provides several experimental tests clearly showing the practicability of the approach and the sharp improvement with respect to state of-the-art approaches.