 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing Power Grid Inspections with Machine Learning
Feb 18, 2025



Ensuring the safety and reliability of power grids is critical as global energy demands continue to rise. Traditional inspection methods, such as manual observations or helicopter surveys, are resource-intensive and lack scalability. This paper explores the use of 3D computer vision to automate power grid inspections, utilizing the TS40K dataset -- a high-density, annotated collection of 3D LiDAR point clouds. By concentrating on 3D semantic segmentation, our approach addresses challenges like class imbalance and noisy data to enhance the detection of critical grid components such as power lines and towers. The benchmark results indicate significant performance improvements, with IoU scores reaching 95.53% for the detection of power lines using transformer-based models. Our findings illustrate the potential for integrating ML into grid maintenance workflows, increasing efficiency and enabling proactive risk management strategies.
Hierarchical Whole-body Control of the cable-Suspended Aerial Manipulator endowed with Winch-based Actuation
May 25, 2023



During operation, aerial manipulation systems are affected by various disturbances. Among them is a gravitational torque caused by the weight of the robotic arm. Common propeller-based actuation is ineffective against such disturbances because of possible overheating and high power consumption. To overcome this issue, in this paper we propose a winchbased actuation for the crane-stationed cable-suspended aerial manipulator. Three winch-controlled suspension rigging cables produce a desired cable tension distribution to generate a wrench that reduces the effect of gravitational torque. In order to coordinate the robotic arm and the winch-based actuation, a model-based hierarchical whole-body controller is adapted. It resolves two tasks: keeping the robotic arm end-effector at the desired pose and shifting the system center of mass in the location with zero gravitational torque. The performance of the introduced actuation system as well as control strategy is validated through experimental studies.
EigenMPC: An Eigenmanifold-Inspired Model-Predictive Control Framework for Exciting Efficient Oscillations in Mechanical Systems
Mar 03, 2023



This paper proposes a Nonlinear Model-Predictive Control (NMPC) method capable of finding and converging to energy-efficient regular oscillations, which require no control action to be sustained. The approach builds up on the recently developed Eigenmanifold theory, which defines the sets of line-shaped oscillations of a robot as an invariant two-dimensional submanifold of its state space. By defining the control problem as a nonlinear program (NLP), the controller is able to deal with constraints in the state and control variables and be energy-efficient not only in its final trajectory but also during the convergence phase. An initial implementation of this approach is proposed, analyzed, and tested in simulation.
Virtual Reality via Object Poses and Active Learning: Realizing Telepresence Robots with Aerial Manipulation Capabilities
Oct 18, 2022
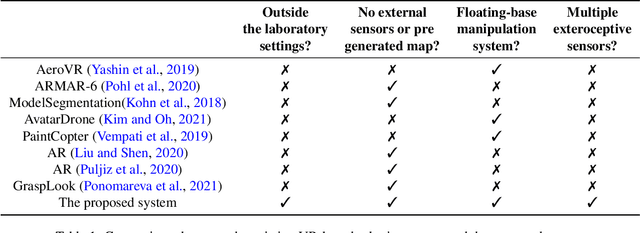
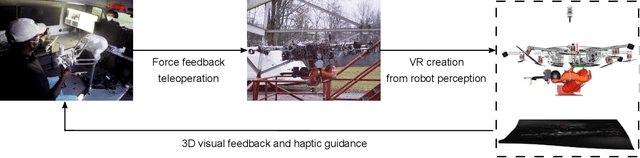
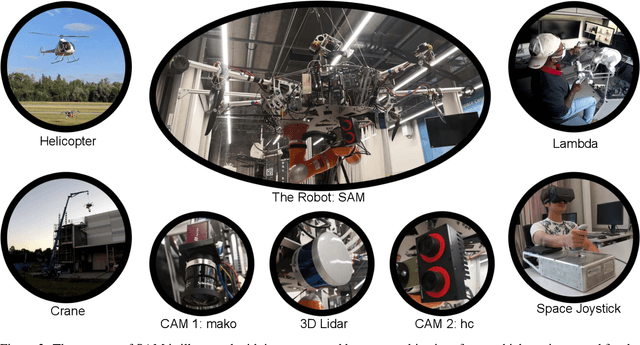
This article presents a novel telepresence system for advancing aerial manipulation in dynamic and unstructured environments. The proposed system not only features a haptic device, but also a virtual reality (VR) interface that provides real-time 3D displays of the robot's workspace as well as a haptic guidance to its remotely located operator. To realize this, multiple sensors namely a LiDAR, cameras and IMUs are utilized. For processing of the acquired sensory data, pose estimation pipelines are devised for industrial objects of both known and unknown geometries. We further propose an active learning pipeline in order to increase the sample efficiency of a pipeline component that relies on Deep Neural Networks (DNNs) based object detection. All these algorithms jointly address various challenges encountered during the execution of perception tasks in industrial scenarios. In the experiments, exhaustive ablation studies are provided to validate the proposed pipelines. Methodologically, these results commonly suggest how an awareness of the algorithms' own failures and uncertainty ("introspection") can be used tackle the encountered problems. Moreover, outdoor experiments are conducted to evaluate the effectiveness of the overall system in enhancing aerial manipulation capabilities. In particular, with flight campaigns over days and nights, from spring to winter, and with different users and locations, we demonstrate over 70 robust executions of pick-and-place, force application and peg-in-hole tasks with the DLR cable-Suspended Aerial Manipulator (SAM). As a result, we show the viability of the proposed system in future industrial applications.
Visual-Inertial Telepresence for Aerial Manipulation
Mar 25, 2020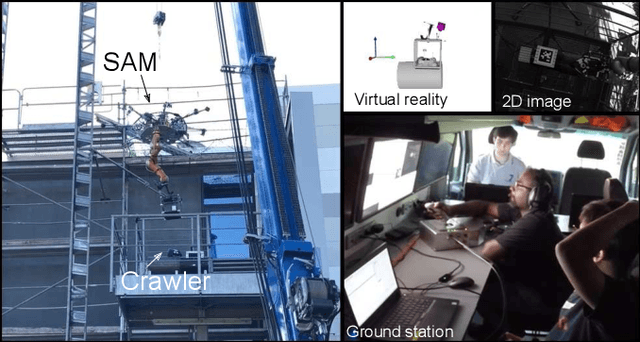
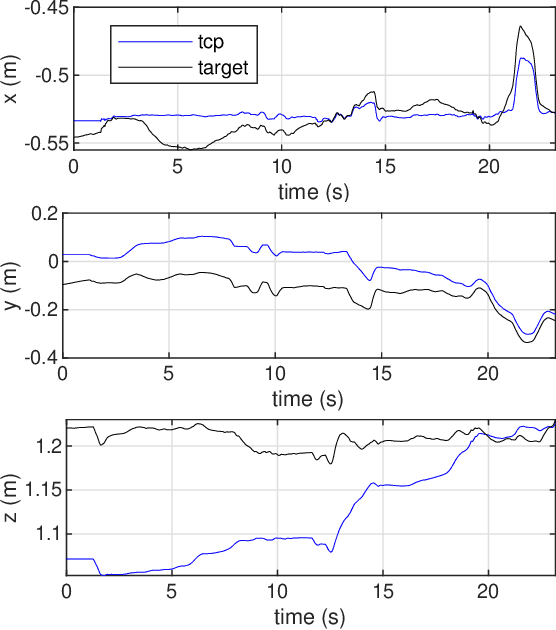
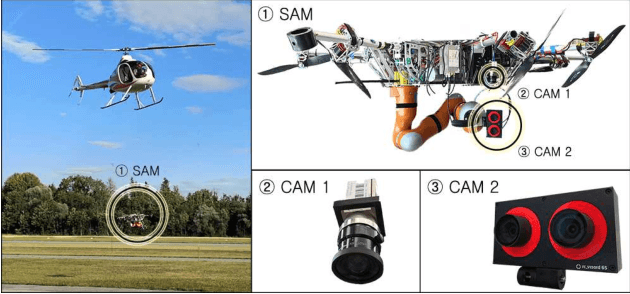
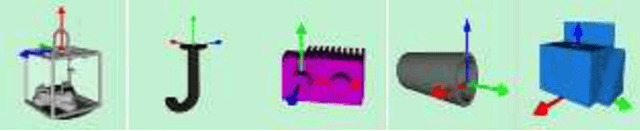
This paper presents a novel telepresence system for enhancing aerial manipulation capabilities. It involves not only a haptic device, but also a virtual reality that provides a 3D visual feedback to a remotely-located teleoperator in real-time. We achieve this by utilizing onboard visual and inertial sensors, an object tracking algorithm and a pre-generated object database. As the virtual reality has to closely match the real remote scene, we propose an extension of a marker tracking algorithm with visual-inertial odometry. Both indoor and outdoor experiments show benefits of our proposed system in achieving advanced aerial manipulation tasks, namely grasping, placing, force exertion and peg-in-hole insertion.
Optimal Oscillation Damping Control of cable-Suspended Aerial Manipulator with a Single IMU Sensor
Mar 01, 2020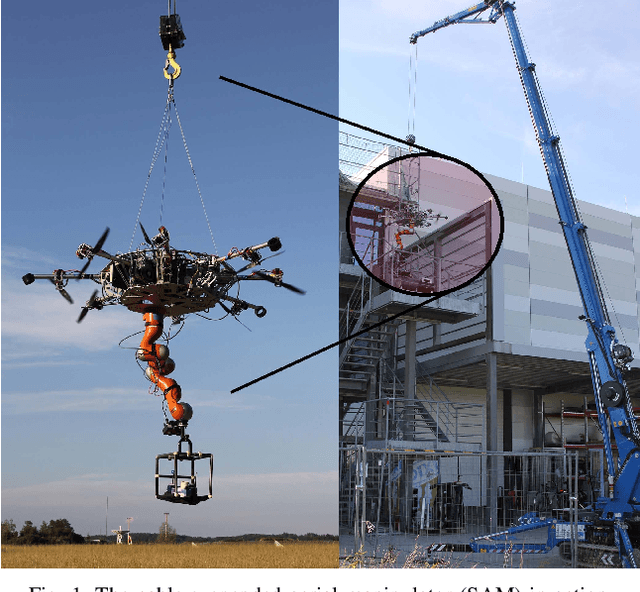
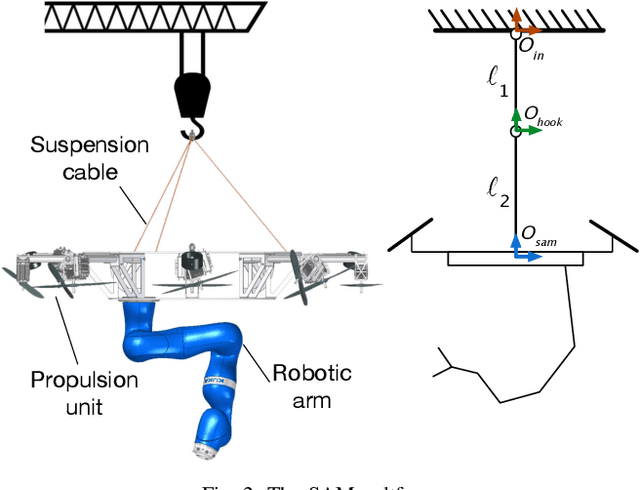
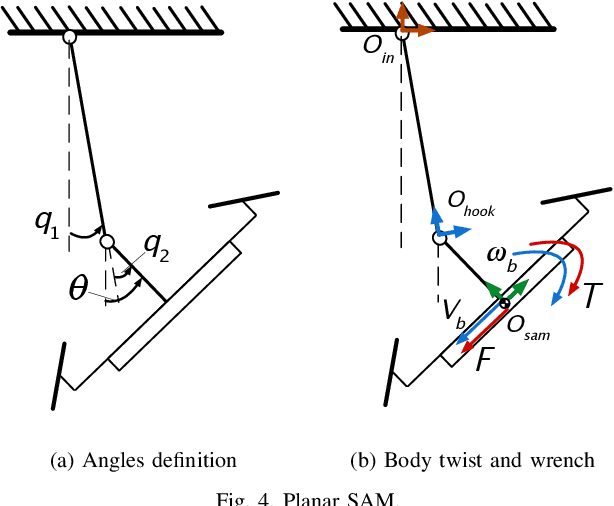
This paper presents a design of oscillation damping control for the cable-Suspended Aerial Manipulator (SAM). The SAM is modeled as a double pendulum, and it can generate a body wrench as a control action. The main challenge is the fact that there is only one onboard IMU sensor which does not provide full information on the system state. To overcome this difficulty, we design a controller motivated by a simplified SAM model. The proposed controller is very simple yet robust to model uncertainties. Moreover, we propose a gain tuning rule by formulating the proposed controller in the form of output feedback linear quadratic regulation problem. Consequently, it is possible to quickly dampen oscillations with minimal energy consumption. The proposed approach is validated through simulations and experiments.
Whole-Body Bilateral Teleoperation of a Redundant Aerial Manipulator
Feb 11, 2020
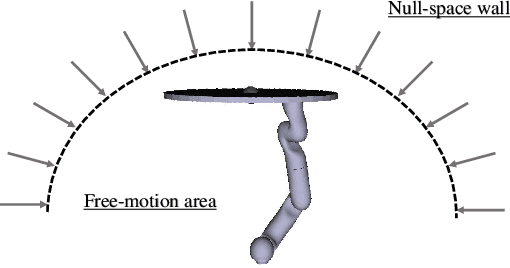
Attaching a robotic manipulator to a flying base allows for significant improvements in the reachability and versatility of manipulation tasks. In order to explore such systems while taking advantage of human capabilities in terms of perception and cognition, bilateral teleoperation arises as a reasonable solution. However, since most telemanipulation tasks require visual feedback in addition to the haptic one, real-time (task-dependent) positioning of a video camera, which is usually attached to the flying base, becomes an additional objective to be fulfilled. Since the flying base is part of the kinematic structure of the robot, if proper care is not taken, moving the video camera could undesirably disturb the end-effector motion. For that reason, the necessity of controlling the base position in the null space of the manipulation task arises. In order to provide the operator with meaningful information about the limits of the allowed motions in the null space, this paper presents a novel haptic concept called Null-Space Wall. In addition, a framework to allow stable bilateral teleoperation of both tasks is presented. Numerical simulation data confirm that the proposed framework is able to keep the system passive while allowing the operator to perform time-delayed telemanipulation and command the base to a task-dependent optimal pose.
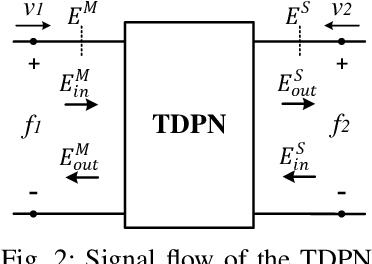
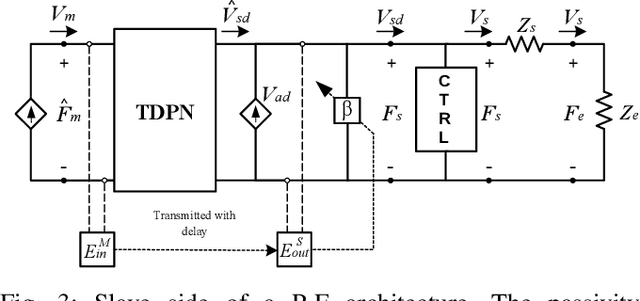
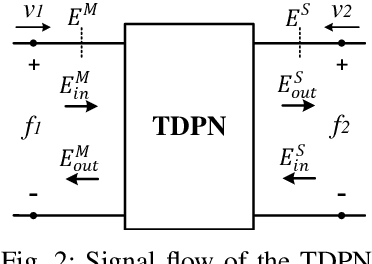
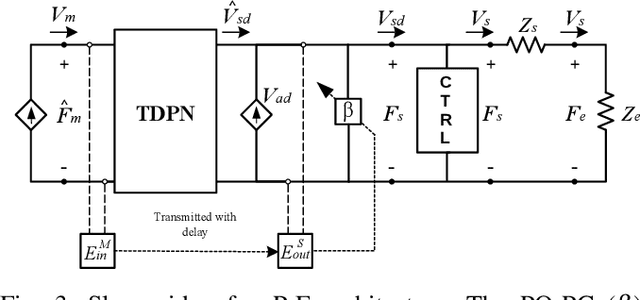
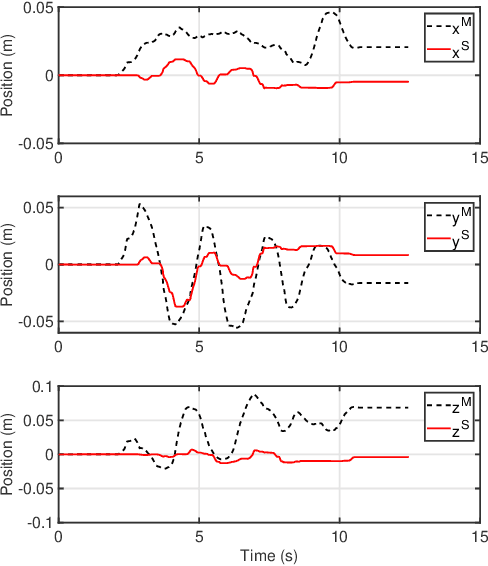
Smoother Position-Drift Compensation for Time Domain Passivity Approach based Teleoperation
Feb 06, 2020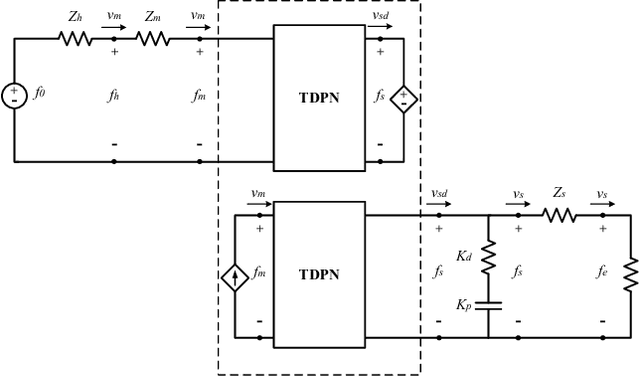
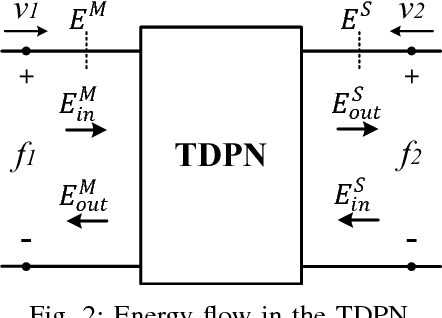
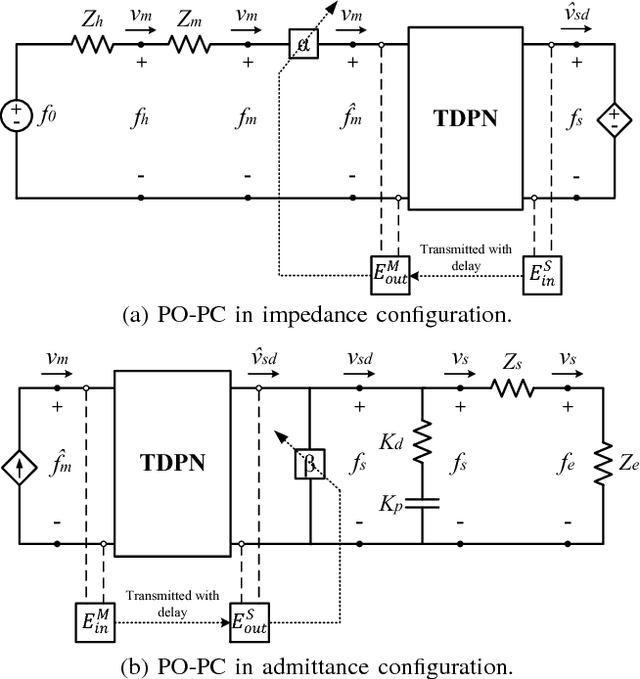
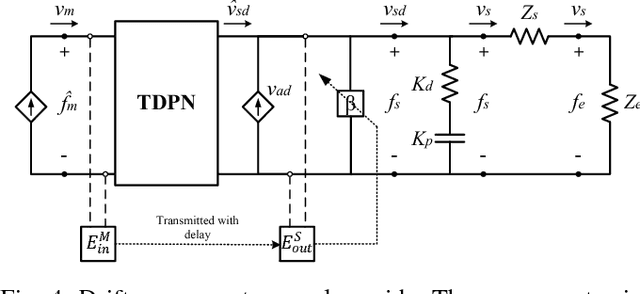
Despite being one of the most robust methods in bilateral teleoperation, Time Domain Passivity Approach (TDPA) presents the drawback of accumulating position drift between master and slave devices. The lack of position synchronization poses an obstacle to the performance of teleoperation and may prevent the successful accomplishment of such tasks. Several techniques have been developed in order to solve the position-drift problem in TDPA-based teleoperation. However, they either present poor transparency by over-conservatively constraining force feedback or add high impulse-like force signals that can be harmful to the hardware and to the human operator. We propose a new approach to compensate position drift in TDPA-based teleoperation in a smoother way, which keeps the forces within the normal range of the teleoperation task while preserving the level of transparency and the robust stability of energy-based TDPA. We also add a way of tuning the compensator to behave in accordance with the task being performed, whether it requires faster or smoother compensation. The feasibility and performance of the method were experimentally validated. Good position tracking and regular-amplitude forces are demonstrated with up to 500 ms round-trip constant and variable delays for hard-wall contacts.
Multi-DoF Time Domain Passivity Approach Based Drift Compensation for Telemanipulation
Oct 10, 2019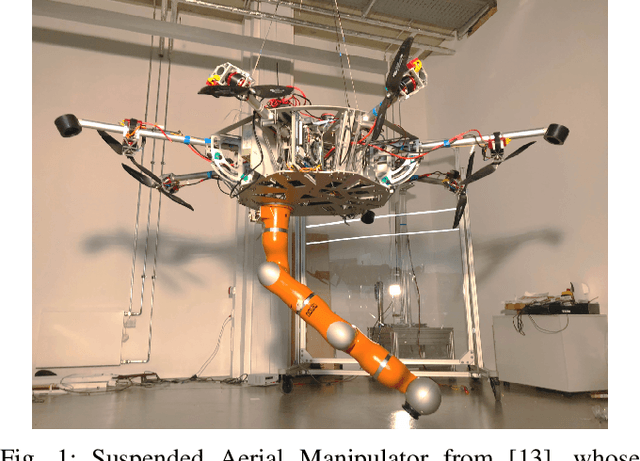
When, in addition to stability, position synchronization is also desired in bilateral teleoperation, Time Domain Passivity Approach (TDPA) alone might not be able to fulfill the desired objective. This is due to an undesired effect caused by admittance type passivity controllers, namely position drift. Previous works focused on developing TDPA-based drift compensation methods to solve this issue. It was shown that, in addition to reducing drift, one of the proposed methods was able to keep the force signals within their normal range, guaranteeing the safety of the task. However, no multi-DoF treatment of those approaches has been addressed. In that scope, this paper focuses on providing an extension of previous TDPA-based approaches to multi-DoF Cartesian-space teleoperation. An analysis of the convergence properties of the presented method is also provided. In addition, its applicability to multi-DoF devices is shown through hardware experiments and numerical simulation with round-trip time delays up to 700 ms.