 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemantic Interpretation and Validation of Graph Attention-based Explanations for GNN Models
Aug 08, 2023



In this work, we propose a methodology for investigating the application of semantic attention to enhance the explainability of Graph Neural Network (GNN)-based models, introducing semantically-informed perturbations and establishing a correlation between predicted feature-importance weights and model accuracy. Graph Deep Learning (GDL) has emerged as a promising field for tasks like scene interpretation, leveraging flexible graph structures to concisely describe complex features and relationships. As traditional explainability methods used in eXplainable AI (XAI) cannot be directly applied to such structures, graph-specific approaches are introduced. Attention mechanisms have demonstrated their efficacy in estimating the importance of input features in deep learning models and thus have been previously employed to provide feature-based explanations for GNN predictions. Building upon these insights, we extend existing attention-based graph-explainability methods investigating the use of attention weights as importance indicators of semantically sorted feature sets. Through analysing the behaviour of predicted attention-weights distribution in correlation with model accuracy, we gain valuable insights into feature importance with respect to the behaviour of the GNN model. We apply our methodology to a lidar pointcloud estimation model successfully identifying key semantic classes that contribute to enhanced performance effectively generating reliable post-hoc semantic explanations.
SEM-GAT: Explainable Semantic Pose Estimation using Learned Graph Attention
Aug 07, 2023This paper proposes a GNN-based method for exploiting semantics and local geometry to guide the identification of reliable pointcloud registration candidates. Semantic and morphological features of the environment serve as key reference points for registration, enabling accurate lidar-based pose estimation. Our novel lightweight static graph structure informs our attention-based keypoint node aggregation GNN network by identifying semantic instance-based relationships, acting as inductive bias to significantly reduce the computational burden of pointcloud registration. By connecting candidate nodes and exploiting cross-graph attention, we identify confidence scores for all potential registration correspondences, estimating the displacement between pointcloud scans. Our pipeline enables introspective analysis of the model's performance by correlating it with the individual contributions of local structures in the environment, providing valuable insights into the system's behaviour. We test our method on the KITTI odometry dataset, achieving competitive accuracy compared to benchmark methods and a higher track smoothness while relying on significantly fewer network parameters.
Visual Servoing on Wheels: Robust Robot Orientation Estimation in Remote Viewpoint Control
Jun 26, 2023



This work proposes a fast deployment pipeline for visually-servoed robots which does not assume anything about either the robot - e.g. sizes, colour or the presence of markers - or the deployment environment. In this, accurate estimation of robot orientation is crucial for successful navigation in complex environments; manual labelling of angular values is, though, time-consuming and possibly hard to perform. For this reason, we propose a weakly supervised pipeline that can produce a vast amount of data in a small amount of time. We evaluate our approach on a dataset of remote camera images captured in various indoor environments demonstrating high tracking performances when integrated into a fully-autonomous pipeline with a simple controller. With this, we then analyse the data requirement of our approach, showing how it is possible to deploy a new robot in a new environment in less than 30.00 min.
Roll-Drop: accounting for observation noise with a single parameter
Apr 25, 2023



This paper proposes a simple strategy for sim-to-real in Deep-Reinforcement Learning (DRL) -- called Roll-Drop -- that uses dropout during simulation to account for observation noise during deployment without explicitly modelling its distribution for each state. DRL is a promising approach to control robots for highly dynamic and feedback-based manoeuvres, and accurate simulators are crucial to providing cheap and abundant data to learn the desired behaviour. Nevertheless, the simulated data are noiseless and generally show a distributional shift that challenges the deployment on real machines where sensor readings are affected by noise. The standard solution is modelling the latter and injecting it during training; while this requires a thorough system identification, Roll-Drop enhances the robustness to sensor noise by tuning only a single parameter. We demonstrate an 80% success rate when up to 25% noise is injected in the observations, with twice higher robustness than the baselines. We deploy the controller trained in simulation on a Unitree A1 platform and assess this improved robustness on the physical system.
Visual DNA: Representing and Comparing Images using Distributions of Neuron Activations
Apr 20, 2023



Selecting appropriate datasets is critical in modern computer vision. However, no general-purpose tools exist to evaluate the extent to which two datasets differ. For this, we propose representing images - and by extension datasets - using Distributions of Neuron Activations (DNAs). DNAs fit distributions, such as histograms or Gaussians, to activations of neurons in a pre-trained feature extractor through which we pass the image(s) to represent. This extractor is frozen for all datasets, and we rely on its generally expressive power in feature space. By comparing two DNAs, we can evaluate the extent to which two datasets differ with granular control over the comparison attributes of interest, providing the ability to customise the way distances are measured to suit the requirements of the task at hand. Furthermore, DNAs are compact, representing datasets of any size with less than 15 megabytes. We demonstrate the value of DNAs by evaluating their applicability on several tasks, including conditional dataset comparison, synthetic image evaluation, and transfer learning, and across diverse datasets, ranging from synthetic cat images to celebrity faces and urban driving scenes.
Explainable Action Prediction through Self-Supervision on Scene Graphs
Feb 07, 2023



This work explores scene graphs as a distilled representation of high-level information for autonomous driving, applied to future driver-action prediction. Given the scarcity and strong imbalance of data samples, we propose a self-supervision pipeline to infer representative and well-separated embeddings. Key aspects are interpretability and explainability; as such, we embed in our architecture attention mechanisms that can create spatial and temporal heatmaps on the scene graphs. We evaluate our system on the ROAD dataset against a fully-supervised approach, showing the superiority of our training regime.
Sampling, Communication, and Prediction Co-Design for Synchronizing the Real-World Device and Digital Model in Metaverse
Jul 31, 2022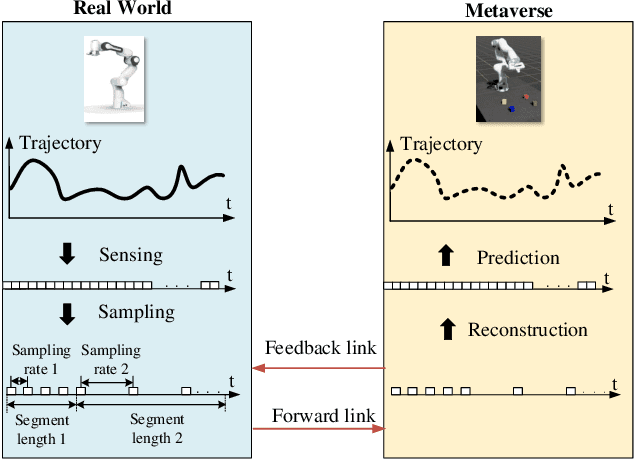
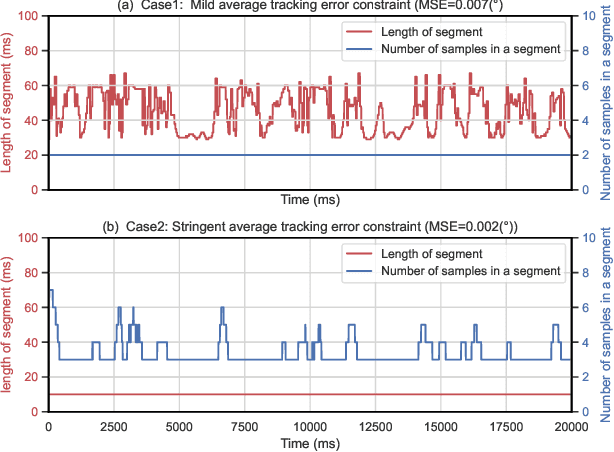
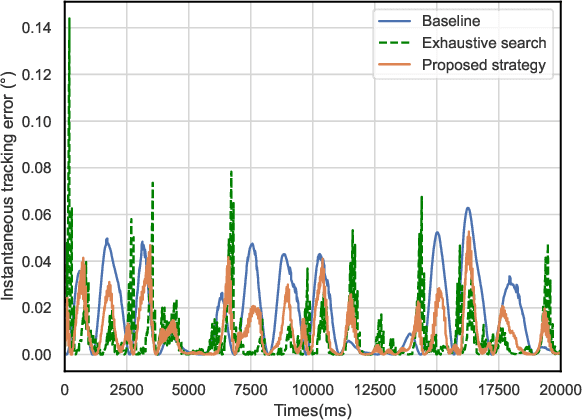
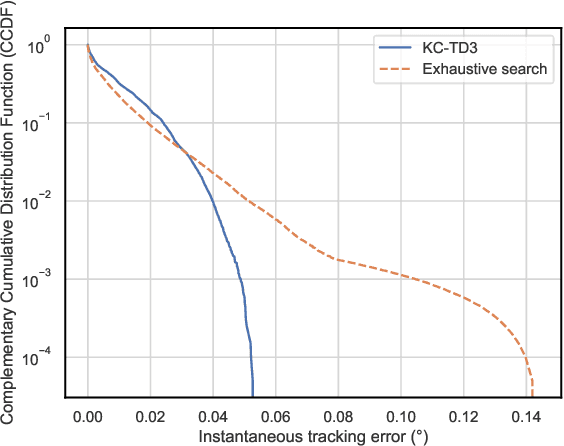
The metaverse has the potential to revolutionize the next generation of the Internet by supporting highly interactive services with the help of Mixed Reality (MR) technologies; still, to provide a satisfactory experience for users, the synchronization between the physical world and its digital models is crucial. This work proposes a sampling, communication and prediction co-design framework to minimize the communication load subject to a constraint on tracking the Mean Squared Error (MSE) between a real-world device and its digital model in the metaverse. To optimize the sampling rate and the prediction horizon, we exploit expert knowledge and develop a constrained Deep Reinforcement Learning (DRL) algorithm, named Knowledge-assisted Constrained Twin-Delayed Deep Deterministic (KC-TD3) policy gradient algorithm. We validate our framework on a prototype composed of a real-world robotic arm and its digital model. Compared with existing approaches: (1) When the tracking error constraint is stringent (MSE=0.002 degrees), our policy degenerates into the policy in the sampling-communication co-design framework. (2) When the tracking error constraint is mild (MSE=0.007 degrees), our policy degenerates into the policy in the prediction-communication co-design framework. (3) Our framework achieves a better trade-off between the average MSE and the average communication load compared with a communication system without sampling and prediction. For example, the average communication load can be reduced up to 87% when the track error constraint is 0.002 degrees. (4) Our policy outperforms the benchmark with the static sampling rate and prediction horizon optimized by exhaustive search, in terms of the tail probability of the tracking error. Furthermore, with the assistance of expert knowledge, the proposed algorithm KC-TD3 achieves better convergence time, stability, and final policy performance.
BoxGraph: Semantic Place Recognition and Pose Estimation from 3D LiDAR
Jun 30, 2022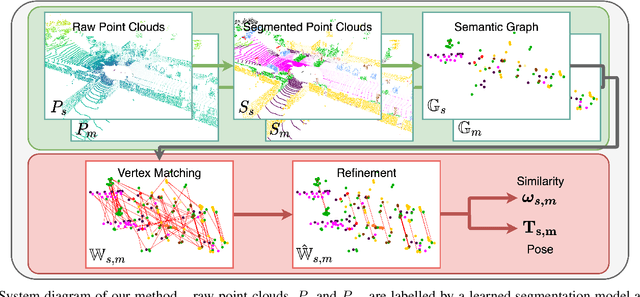
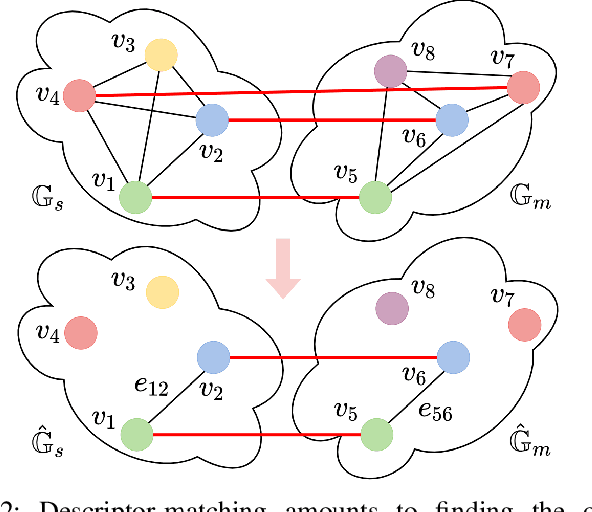
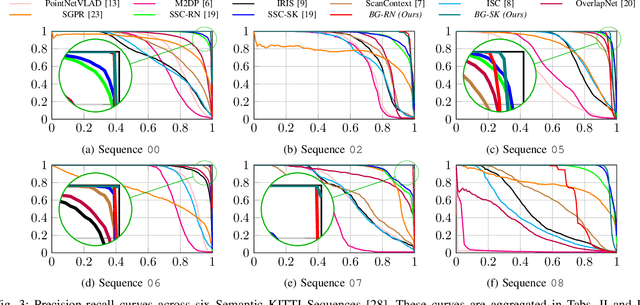

This paper is about extremely robust and lightweight localisation using LiDAR point clouds based on instance segmentation and graph matching. We model 3D point clouds as fully-connected graphs of semantically identified components where each vertex corresponds to an object instance and encodes its shape. Optimal vertex association across graphs allows for full 6-Degree-of-Freedom (DoF) pose estimation and place recognition by measuring similarity. This representation is very concise, condensing the size of maps by a factor of 25 against the state-of-the-art, requiring only 3kB to represent a 1.4MB laser scan. We verify the efficacy of our system on the SemanticKITTI dataset, where we achieve a new state-of-the-art in place recognition, with an average of 88.4% recall at 100% precision where the next closest competitor follows with 64.9%. We also show accurate metric pose estimation performance - estimating 6-DoF pose with median errors of 10 cm and 0.33 deg.
What Goes Around: Leveraging a Constant-curvature Motion Constraint in Radar Odometry
Jun 21, 2022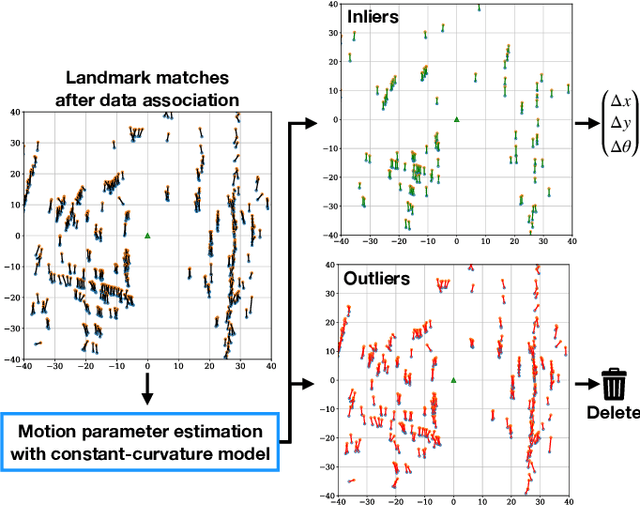
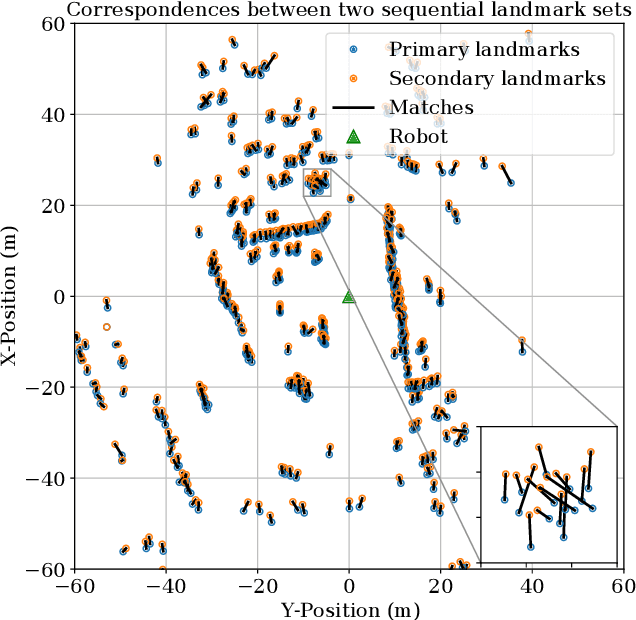
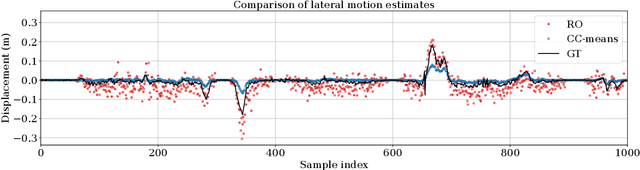
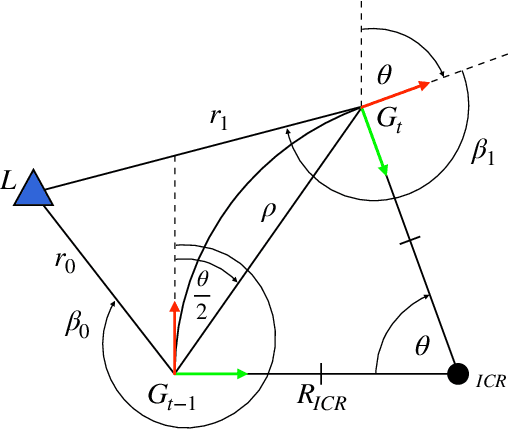
This paper presents a method that leverages vehicle motion constraints to refine data associations in a point-based radar odometry system. By using the strong prior on how a non-holonomic robot is constrained to move smoothly through its environment, we develop the necessary framework to estimate ego-motion from a single landmark association rather than considering all of these correspondences at once. This allows for informed outlier detection of poor matches that are a dominant source of pose estimate error. By refining the subset of matched landmarks, we see an absolute decrease of 2.15% (from 4.68% to 2.53%) in translational error, approximately halving the error in odometry (reducing by 45.94%) than when using the full set of correspondences. This contribution is relevant to other point-based odometry implementations that rely on a range sensor and provides a lightweight and interpretable means of incorporating vehicle dynamics for ego-motion estimation.
Depth-SIMS: Semi-Parametric Image and Depth Synthesis
Mar 07, 2022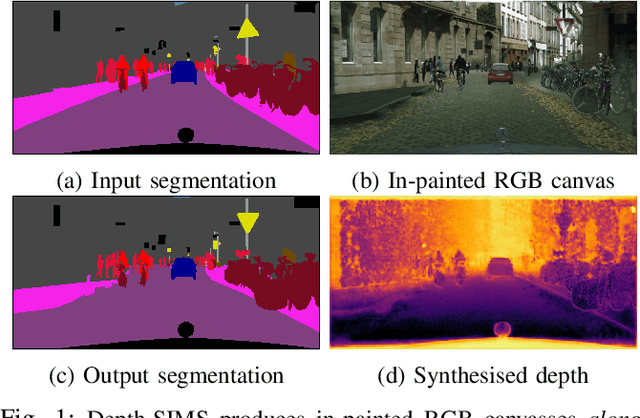
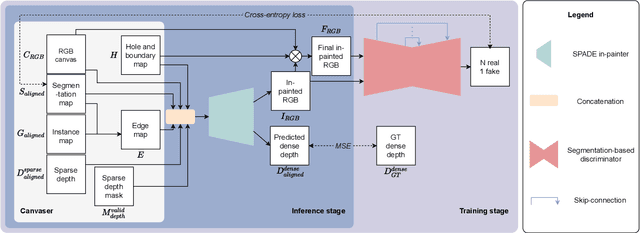
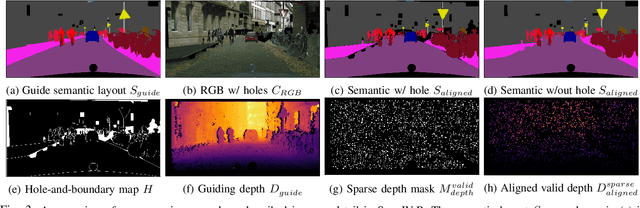
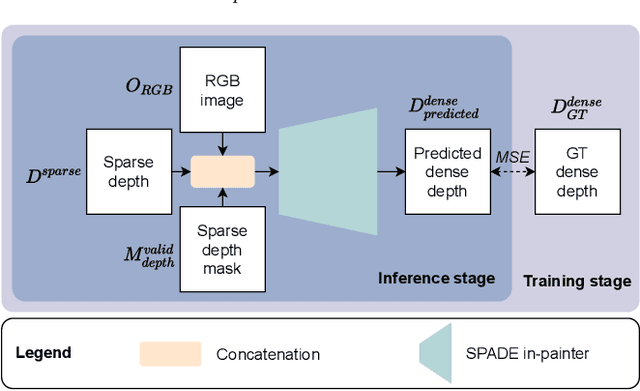
In this paper we present a compositing image synthesis method that generates RGB canvases with well aligned segmentation maps and sparse depth maps, coupled with an in-painting network that transforms the RGB canvases into high quality RGB images and the sparse depth maps into pixel-wise dense depth maps. We benchmark our method in terms of structural alignment and image quality, showing an increase in mIoU over SOTA by 3.7 percentage points and a highly competitive FID. Furthermore, we analyse the quality of the generated data as training data for semantic segmentation and depth completion, and show that our approach is more suited for this purpose than other methods.