 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCERES: Critical-Event Reconstruction via Temporal Scene Graph Completion
Oct 17, 2024



This paper proposes a method for on-demand scenario generation in simulation, grounded on real-world data. Evaluating the behaviour of Autonomous Vehicles (AVs) in both safety-critical and regular scenarios is essential for assessing their robustness before real-world deployment. By integrating scenarios derived from real-world datasets into the simulation, we enhance the plausibility and validity of testing sets. This work introduces a novel approach that employs temporal scene graphs to capture evolving spatiotemporal relationships among scene entities from a real-world dataset, enabling the generation of dynamic scenarios in simulation through Graph Neural Networks (GNNs). User-defined action and criticality conditioning are used to ensure flexible, tailored scenario creation. Our model significantly outperforms the benchmarks in accurately predicting links corresponding to the requested scenarios. We further evaluate the validity and compatibility of our generated scenarios in an off-the-shelf simulator.
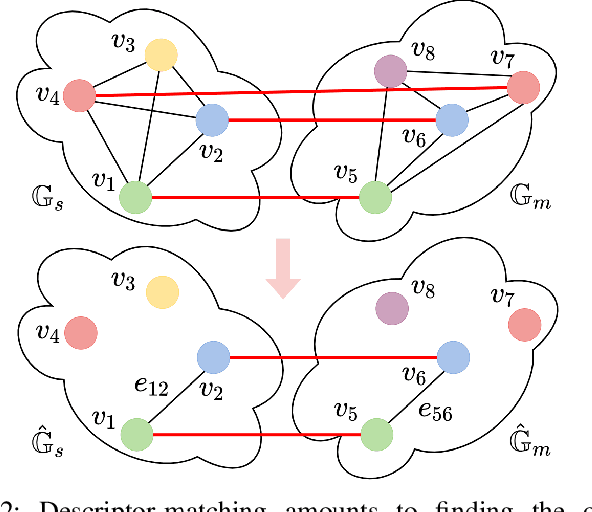
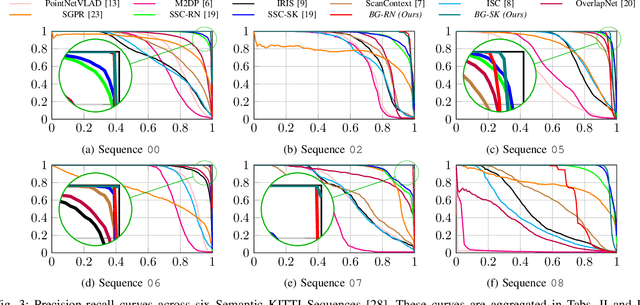
That's My Point: Compact Object-centric LiDAR Pose Estimation for Large-scale Outdoor Localisation
Mar 07, 2024This paper is about 3D pose estimation on LiDAR scans with extremely minimal storage requirements to enable scalable mapping and localisation. We achieve this by clustering all points of segmented scans into semantic objects and representing them only with their respective centroid and semantic class. In this way, each LiDAR scan is reduced to a compact collection of four-number vectors. This abstracts away important structural information from the scenes, which is crucial for traditional registration approaches. To mitigate this, we introduce an object-matching network based on self- and cross-correlation that captures geometric and semantic relationships between entities. The respective matches allow us to recover the relative transformation between scans through weighted Singular Value Decomposition (SVD) and RANdom SAmple Consensus (RANSAC). We demonstrate that such representation is sufficient for metric localisation by registering point clouds taken under different viewpoints on the KITTI dataset, and at different periods of time localising between KITTI and KITTI-360. We achieve accurate metric estimates comparable with state-of-the-art methods with almost half the representation size, specifically 1.33 kB on average.
OORD: The Oxford Offroad Radar Dataset
Mar 05, 2024There is a growing academic interest as well as commercial exploitation of millimetre-wave scanning radar for autonomous vehicle localisation and scene understanding. Although several datasets to support this research area have been released, they are primarily focused on urban or semi-urban environments. Nevertheless, rugged offroad deployments are important application areas which also present unique challenges and opportunities for this sensor technology. Therefore, the Oxford Offroad Radar Dataset (OORD) presents data collected in the rugged Scottish highlands in extreme weather. The radar data we offer to the community are accompanied by GPS/INS reference - to further stimulate research in radar place recognition. In total we release over 90GiB of radar scans as well as GPS and IMU readings by driving a diverse set of four routes over 11 forays, totalling approximately 154km of rugged driving. This is an area increasingly explored in literature, and we therefore present and release examples of recent open-sourced radar place recognition systems and their performance on our dataset. This includes a learned neural network, the weights of which we also release. The data and tools are made freely available to the community at https://oxford-robotics-institute.github.io/oord-dataset.
SEM-GAT: Explainable Semantic Pose Estimation using Learned Graph Attention
Aug 07, 2023This paper proposes a GNN-based method for exploiting semantics and local geometry to guide the identification of reliable pointcloud registration candidates. Semantic and morphological features of the environment serve as key reference points for registration, enabling accurate lidar-based pose estimation. Our novel lightweight static graph structure informs our attention-based keypoint node aggregation GNN network by identifying semantic instance-based relationships, acting as inductive bias to significantly reduce the computational burden of pointcloud registration. By connecting candidate nodes and exploiting cross-graph attention, we identify confidence scores for all potential registration correspondences, estimating the displacement between pointcloud scans. Our pipeline enables introspective analysis of the model's performance by correlating it with the individual contributions of local structures in the environment, providing valuable insights into the system's behaviour. We test our method on the KITTI odometry dataset, achieving competitive accuracy compared to benchmark methods and a higher track smoothness while relying on significantly fewer network parameters.
BoxGraph: Semantic Place Recognition and Pose Estimation from 3D LiDAR
Jun 30, 2022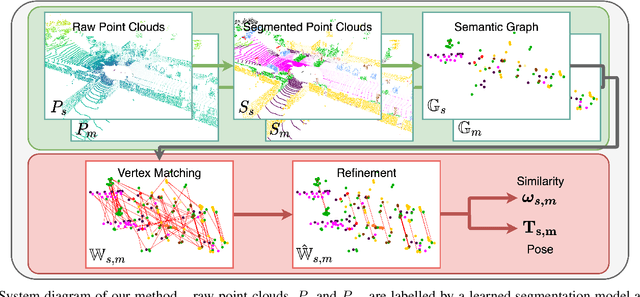

This paper is about extremely robust and lightweight localisation using LiDAR point clouds based on instance segmentation and graph matching. We model 3D point clouds as fully-connected graphs of semantically identified components where each vertex corresponds to an object instance and encodes its shape. Optimal vertex association across graphs allows for full 6-Degree-of-Freedom (DoF) pose estimation and place recognition by measuring similarity. This representation is very concise, condensing the size of maps by a factor of 25 against the state-of-the-art, requiring only 3kB to represent a 1.4MB laser scan. We verify the efficacy of our system on the SemanticKITTI dataset, where we achieve a new state-of-the-art in place recognition, with an average of 88.4% recall at 100% precision where the next closest competitor follows with 64.9%. We also show accurate metric pose estimation performance - estimating 6-DoF pose with median errors of 10 cm and 0.33 deg.