 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSecond-order Optimization of Gaussian Splats with Importance Sampling
Apr 17, 2025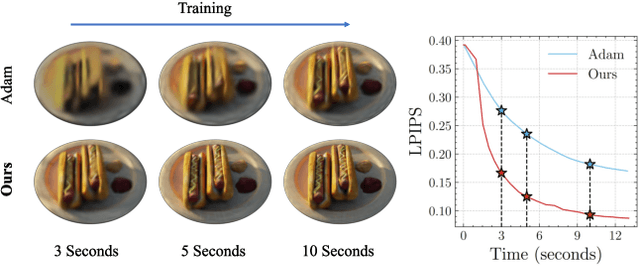



3D Gaussian Splatting (3DGS) is widely used for novel view synthesis due to its high rendering quality and fast inference time. However, 3DGS predominantly relies on first-order optimizers such as Adam, which leads to long training times. To address this limitation, we propose a novel second-order optimization strategy based on Levenberg-Marquardt (LM) and Conjugate Gradient (CG), which we specifically tailor towards Gaussian Splatting. Our key insight is that the Jacobian in 3DGS exhibits significant sparsity since each Gaussian affects only a limited number of pixels. We exploit this sparsity by proposing a matrix-free and GPU-parallelized LM optimization. To further improve its efficiency, we propose sampling strategies for both the camera views and loss function and, consequently, the normal equation, significantly reducing the computational complexity. In addition, we increase the convergence rate of the second-order approximation by introducing an effective heuristic to determine the learning rate that avoids the expensive computation cost of line search methods. As a result, our method achieves a $3\times$ speedup over standard LM and outperforms Adam by $~6\times$ when the Gaussian count is low while remaining competitive for moderate counts. Project Page: https://vcai.mpi-inf.mpg.de/projects/LM-IS
Ego4o: Egocentric Human Motion Capture and Understanding from Multi-Modal Input
Apr 11, 2025



This work focuses on tracking and understanding human motion using consumer wearable devices, such as VR/AR headsets, smart glasses, cellphones, and smartwatches. These devices provide diverse, multi-modal sensor inputs, including egocentric images, and 1-3 sparse IMU sensors in varied combinations. Motion descriptions can also accompany these signals. The diverse input modalities and their intermittent availability pose challenges for consistent motion capture and understanding. In this work, we present Ego4o (o for omni), a new framework for simultaneous human motion capture and understanding from multi-modal egocentric inputs. This method maintains performance with partial inputs while achieving better results when multiple modalities are combined. First, the IMU sensor inputs, the optional egocentric image, and text description of human motion are encoded into the latent space of a motion VQ-VAE. Next, the latent vectors are sent to the VQ-VAE decoder and optimized to track human motion. When motion descriptions are unavailable, the latent vectors can be input into a multi-modal LLM to generate human motion descriptions, which can further enhance motion capture accuracy. Quantitative and qualitative evaluations demonstrate the effectiveness of our method in predicting accurate human motion and high-quality motion descriptions.
GIGA: Generalizable Sparse Image-driven Gaussian Avatars
Apr 08, 2025Driving a high-quality and photorealistic full-body human avatar, from only a few RGB cameras, is a challenging problem that has become increasingly relevant with emerging virtual reality technologies. To democratize such technology, a promising solution may be a generalizable method that takes sparse multi-view images of an unseen person and then generates photoreal free-view renderings of such identity. However, the current state of the art is not scalable to very large datasets and, thus, lacks in diversity and photorealism. To address this problem, we propose a novel, generalizable full-body model for rendering photoreal humans in free viewpoint, as driven by sparse multi-view video. For the first time in literature, our model can scale up training to thousands of subjects while maintaining high photorealism. At the core, we introduce a MultiHeadUNet architecture, which takes sparse multi-view images in texture space as input and predicts Gaussian primitives represented as 2D texels on top of a human body mesh. Importantly, we represent sparse-view image information, body shape, and the Gaussian parameters in 2D so that we can design a deep and scalable architecture entirely based on 2D convolutions and attention mechanisms. At test time, our method synthesizes an articulated 3D Gaussian-based avatar from as few as four input views and a tracked body template for unseen identities. Our method excels over prior works by a significant margin in terms of cross-subject generalization capability as well as photorealism.
FRAME: Floor-aligned Representation for Avatar Motion from Egocentric Video
Mar 29, 2025



Egocentric motion capture with a head-mounted body-facing stereo camera is crucial for VR and AR applications but presents significant challenges such as heavy occlusions and limited annotated real-world data. Existing methods rely on synthetic pretraining and struggle to generate smooth and accurate predictions in real-world settings, particularly for lower limbs. Our work addresses these limitations by introducing a lightweight VR-based data collection setup with on-board, real-time 6D pose tracking. Using this setup, we collected the most extensive real-world dataset for ego-facing ego-mounted cameras to date in size and motion variability. Effectively integrating this multimodal input -- device pose and camera feeds -- is challenging due to the differing characteristics of each data source. To address this, we propose FRAME, a simple yet effective architecture that combines device pose and camera feeds for state-of-the-art body pose prediction through geometrically sound multimodal integration and can run at 300 FPS on modern hardware. Lastly, we showcase a novel training strategy to enhance the model's generalization capabilities. Our approach exploits the problem's geometric properties, yielding high-quality motion capture free from common artifacts in prior works. Qualitative and quantitative evaluations, along with extensive comparisons, demonstrate the effectiveness of our method. Data, code, and CAD designs will be available at https://vcai.mpi-inf.mpg.de/projects/FRAME/
Thin-Shell-SfT: Fine-Grained Monocular Non-rigid 3D Surface Tracking with Neural Deformation Fields
Mar 25, 20253D reconstruction of highly deformable surfaces (e.g. cloths) from monocular RGB videos is a challenging problem, and no solution provides a consistent and accurate recovery of fine-grained surface details. To account for the ill-posed nature of the setting, existing methods use deformation models with statistical, neural, or physical priors. They also predominantly rely on nonadaptive discrete surface representations (e.g. polygonal meshes), perform frame-by-frame optimisation leading to error propagation, and suffer from poor gradients of the mesh-based differentiable renderers. Consequently, fine surface details such as cloth wrinkles are often not recovered with the desired accuracy. In response to these limitations, we propose ThinShell-SfT, a new method for non-rigid 3D tracking that represents a surface as an implicit and continuous spatiotemporal neural field. We incorporate continuous thin shell physics prior based on the Kirchhoff-Love model for spatial regularisation, which starkly contrasts the discretised alternatives of earlier works. Lastly, we leverage 3D Gaussian splatting to differentiably render the surface into image space and optimise the deformations based on analysis-bysynthesis principles. Our Thin-Shell-SfT outperforms prior works qualitatively and quantitatively thanks to our continuous surface formulation in conjunction with a specially tailored simulation prior and surface-induced 3D Gaussians. See our project page at https://4dqv.mpiinf.mpg.de/ThinShellSfT.
Bring Your Rear Cameras for Egocentric 3D Human Pose Estimation
Mar 14, 2025



Egocentric 3D human pose estimation has been actively studied using cameras installed in front of a head-mounted device (HMD). While frontal placement is the optimal and the only option for some tasks, such as hand tracking, it remains unclear if the same holds for full-body tracking due to self-occlusion and limited field-of-view coverage. Notably, even the state-of-the-art methods often fail to estimate accurate 3D poses in many scenarios, such as when HMD users tilt their heads upward (a common motion in human activities). A key limitation of existing HMD designs is their neglect of the back of the body, despite its potential to provide crucial 3D reconstruction cues. Hence, this paper investigates the usefulness of rear cameras in the HMD design for full-body tracking. We also show that simply adding rear views to the frontal inputs is not optimal for existing methods due to their dependence on individual 2D joint detectors without effective multi-view integration. To address this issue, we propose a new transformer-based method that refines 2D joint heatmap estimation with multi-view information and heatmap uncertainty, thereby improving 3D pose tracking. Moreover, we introduce two new large-scale datasets, Ego4View-Syn and Ego4View-RW, for a rear-view evaluation. Our experiments show that the new camera configurations with back views provide superior support for 3D pose tracking compared to only frontal placements. The proposed method achieves significant improvement over the current state of the art (>10% on MPJPE). We will release the source code, trained models, and new datasets on our project page https://4dqv.mpi-inf.mpg.de/EgoRear/.
3HANDS Dataset: Learning from Humans for Generating Naturalistic Handovers with Supernumerary Robotic Limbs
Mar 06, 2025



Supernumerary robotic limbs (SRLs) are robotic structures integrated closely with the user's body, which augment human physical capabilities and necessitate seamless, naturalistic human-machine interaction. For effective assistance in physical tasks, enabling SRLs to hand over objects to humans is crucial. Yet, designing heuristic-based policies for robots is time-consuming, difficult to generalize across tasks, and results in less human-like motion. When trained with proper datasets, generative models are powerful alternatives for creating naturalistic handover motions. We introduce 3HANDS, a novel dataset of object handover interactions between a participant performing a daily activity and another participant enacting a hip-mounted SRL in a naturalistic manner. 3HANDS captures the unique characteristics of SRL interactions: operating in intimate personal space with asymmetric object origins, implicit motion synchronization, and the user's engagement in a primary task during the handover. To demonstrate the effectiveness of our dataset, we present three models: one that generates naturalistic handover trajectories, another that determines the appropriate handover endpoints, and a third that predicts the moment to initiate a handover. In a user study (N=10), we compare the handover interaction performed with our method compared to a baseline. The findings show that our method was perceived as significantly more natural, less physically demanding, and more comfortable.
Enhancing Spoken Discourse Modeling in Language Models Using Gestural Cues
Mar 05, 2025



Research in linguistics shows that non-verbal cues, such as gestures, play a crucial role in spoken discourse. For example, speakers perform hand gestures to indicate topic shifts, helping listeners identify transitions in discourse. In this work, we investigate whether the joint modeling of gestures using human motion sequences and language can improve spoken discourse modeling in language models. To integrate gestures into language models, we first encode 3D human motion sequences into discrete gesture tokens using a VQ-VAE. These gesture token embeddings are then aligned with text embeddings through feature alignment, mapping them into the text embedding space. To evaluate the gesture-aligned language model on spoken discourse, we construct text infilling tasks targeting three key discourse cues grounded in linguistic research: discourse connectives, stance markers, and quantifiers. Results show that incorporating gestures enhances marker prediction accuracy across the three tasks, highlighting the complementary information that gestures can offer in modeling spoken discourse. We view this work as an initial step toward leveraging non-verbal cues to advance spoken language modeling in language models.
Betsu-Betsu: Multi-View Separable 3D Reconstruction of Two Interacting Objects
Feb 19, 2025



Separable 3D reconstruction of multiple objects from multi-view RGB images -- resulting in two different 3D shapes for the two objects with a clear separation between them -- remains a sparsely researched problem. It is challenging due to severe mutual occlusions and ambiguities along the objects' interaction boundaries. This paper investigates the setting and introduces a new neuro-implicit method that can reconstruct the geometry and appearance of two objects undergoing close interactions while disjoining both in 3D, avoiding surface inter-penetrations and enabling novel-view synthesis of the observed scene. The framework is end-to-end trainable and supervised using a novel alpha-blending regularisation that ensures that the two geometries are well separated even under extreme occlusions. Our reconstruction method is markerless and can be applied to rigid as well as articulated objects. We introduce a new dataset consisting of close interactions between a human and an object and also evaluate on two scenes of humans performing martial arts. The experiments confirm the effectiveness of our framework and substantial improvements using 3D and novel view synthesis metrics compared to several existing approaches applicable in our setting.
EventEgo3D++: 3D Human Motion Capture from a Head-Mounted Event Camera
Feb 11, 2025Monocular egocentric 3D human motion capture remains a significant challenge, particularly under conditions of low lighting and fast movements, which are common in head-mounted device applications. Existing methods that rely on RGB cameras often fail under these conditions. To address these limitations, we introduce EventEgo3D++, the first approach that leverages a monocular event camera with a fisheye lens for 3D human motion capture. Event cameras excel in high-speed scenarios and varying illumination due to their high temporal resolution, providing reliable cues for accurate 3D human motion capture. EventEgo3D++ leverages the LNES representation of event streams to enable precise 3D reconstructions. We have also developed a mobile head-mounted device (HMD) prototype equipped with an event camera, capturing a comprehensive dataset that includes real event observations from both controlled studio environments and in-the-wild settings, in addition to a synthetic dataset. Additionally, to provide a more holistic dataset, we include allocentric RGB streams that offer different perspectives of the HMD wearer, along with their corresponding SMPL body model. Our experiments demonstrate that EventEgo3D++ achieves superior 3D accuracy and robustness compared to existing solutions, even in challenging conditions. Moreover, our method supports real-time 3D pose updates at a rate of 140Hz. This work is an extension of the EventEgo3D approach (CVPR 2024) and further advances the state of the art in egocentric 3D human motion capture. For more details, visit the project page at https://eventego3d.mpi-inf.mpg.de.