 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSecond-order Optimization of Gaussian Splats with Importance Sampling
Apr 17, 2025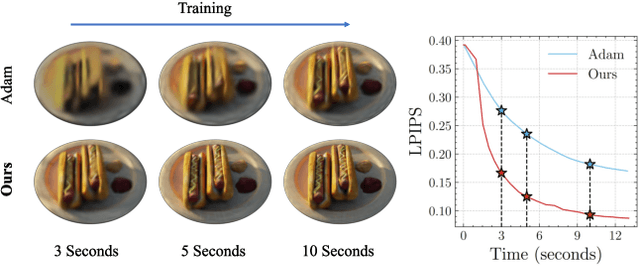



3D Gaussian Splatting (3DGS) is widely used for novel view synthesis due to its high rendering quality and fast inference time. However, 3DGS predominantly relies on first-order optimizers such as Adam, which leads to long training times. To address this limitation, we propose a novel second-order optimization strategy based on Levenberg-Marquardt (LM) and Conjugate Gradient (CG), which we specifically tailor towards Gaussian Splatting. Our key insight is that the Jacobian in 3DGS exhibits significant sparsity since each Gaussian affects only a limited number of pixels. We exploit this sparsity by proposing a matrix-free and GPU-parallelized LM optimization. To further improve its efficiency, we propose sampling strategies for both the camera views and loss function and, consequently, the normal equation, significantly reducing the computational complexity. In addition, we increase the convergence rate of the second-order approximation by introducing an effective heuristic to determine the learning rate that avoids the expensive computation cost of line search methods. As a result, our method achieves a $3\times$ speedup over standard LM and outperforms Adam by $~6\times$ when the Gaussian count is low while remaining competitive for moderate counts. Project Page: https://vcai.mpi-inf.mpg.de/projects/LM-IS
FRAME: Floor-aligned Representation for Avatar Motion from Egocentric Video
Mar 29, 2025



Egocentric motion capture with a head-mounted body-facing stereo camera is crucial for VR and AR applications but presents significant challenges such as heavy occlusions and limited annotated real-world data. Existing methods rely on synthetic pretraining and struggle to generate smooth and accurate predictions in real-world settings, particularly for lower limbs. Our work addresses these limitations by introducing a lightweight VR-based data collection setup with on-board, real-time 6D pose tracking. Using this setup, we collected the most extensive real-world dataset for ego-facing ego-mounted cameras to date in size and motion variability. Effectively integrating this multimodal input -- device pose and camera feeds -- is challenging due to the differing characteristics of each data source. To address this, we propose FRAME, a simple yet effective architecture that combines device pose and camera feeds for state-of-the-art body pose prediction through geometrically sound multimodal integration and can run at 300 FPS on modern hardware. Lastly, we showcase a novel training strategy to enhance the model's generalization capabilities. Our approach exploits the problem's geometric properties, yielding high-quality motion capture free from common artifacts in prior works. Qualitative and quantitative evaluations, along with extensive comparisons, demonstrate the effectiveness of our method. Data, code, and CAD designs will be available at https://vcai.mpi-inf.mpg.de/projects/FRAME/
U-BEV: Height-aware Bird's-Eye-View Segmentation and Neural Map-based Relocalization
Oct 20, 2023



Efficient relocalization is essential for intelligent vehicles when GPS reception is insufficient or sensor-based localization fails. Recent advances in Bird's-Eye-View (BEV) segmentation allow for accurate estimation of local scene appearance and in turn, can benefit the relocalization of the vehicle. However, one downside of BEV methods is the heavy computation required to leverage the geometric constraints. This paper presents U-BEV, a U-Net inspired architecture that extends the current state-of-the-art by allowing the BEV to reason about the scene on multiple height layers before flattening the BEV features. We show that this extension boosts the performance of the U-BEV by up to 4.11 IoU. Additionally, we combine the encoded neural BEV with a differentiable template matcher to perform relocalization on neural SD-map data. The model is fully end-to-end trainable and outperforms transformer-based BEV methods of similar computational complexity by 1.7 to 2.8 mIoU and BEV-based relocalization by over 26% Recall Accuracy on the nuScenes dataset.