 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSandWorm: Event-based Visuotactile Perception with Active Vibration for Screw-Actuated Robot in Granular Media
Jan 20, 2026Perception in granular media remains challenging due to unpredictable particle dynamics. To address this challenge, we present SandWorm, a biomimetic screw-actuated robot augmented by peristaltic motion to enhance locomotion, and SWTac, a novel event-based visuotactile sensor with an actively vibrated elastomer. The event camera is mechanically decoupled from vibrations by a spring isolation mechanism, enabling high-quality tactile imaging of both dynamic and stationary objects. For algorithm design, we propose an IMU-guided temporal filter to enhance imaging consistency, improving MSNR by 24%. Moreover, we systematically optimize SWTac with vibration parameters, event camera settings and elastomer properties. Motivated by asymmetric edge features, we also implement contact surface estimation by U-Net. Experimental validation demonstrates SWTac's 0.2 mm texture resolution, 98% stone classification accuracy, and 0.15 N force estimation error, while SandWorm demonstrates versatile locomotion (up to 12.5 mm/s) in challenging terrains, successfully executes pipeline dredging and subsurface exploration in complex granular media (observed 90% success rate). Field experiments further confirm the system's practical performance.
CEI: A Unified Interface for Cross-Embodiment Visuomotor Policy Learning in 3D Space
Jan 14, 2026Robotic foundation models trained on large-scale manipulation datasets have shown promise in learning generalist policies, but they often overfit to specific viewpoints, robot arms, and especially parallel-jaw grippers due to dataset biases. To address this limitation, we propose Cross-Embodiment Interface (\CEI), a framework for cross-embodiment learning that enables the transfer of demonstrations across different robot arm and end-effector morphologies. \CEI introduces the concept of \textit{functional similarity}, which is quantified using Directional Chamfer Distance. Then it aligns robot trajectories through gradient-based optimization, followed by synthesizing observations and actions for unseen robot arms and end-effectors. In experiments, \CEI transfers data and policies from a Franka Panda robot to \textbf{16} different embodiments across \textbf{3} tasks in simulation, and supports bidirectional transfer between a UR5+AG95 gripper robot and a UR5+Xhand robot across \textbf{6} real-world tasks, achieving an average transfer ratio of 82.4\%. Finally, we demonstrate that \CEI can also be extended with spatial generalization and multimodal motion generation capabilities using our proposed techniques. Project website: https://cross-embodiment-interface.github.io/
FlexiCup: Wireless Multimodal Suction Cup with Dual-Zone Vision-Tactile Sensing
Nov 18, 2025



Conventional suction cups lack sensing capabilities for contact-aware manipulation in unstructured environments. This paper presents FlexiCup, a fully wireless multimodal suction cup that integrates dual-zone vision-tactile sensing. The central zone dynamically switches between vision and tactile modalities via illumination control for contact detection, while the peripheral zone provides continuous spatial awareness for approach planning. FlexiCup supports both vacuum and Bernoulli suction modes through modular mechanical configurations, achieving complete wireless autonomy with onboard computation and power. We validate hardware versatility through dual control paradigms. Modular perception-driven grasping across structured surfaces with varying obstacle densities demonstrates comparable performance between vacuum (90.0% mean success) and Bernoulli (86.7% mean success) modes. Diffusion-based end-to-end learning achieves 73.3% success on inclined transport and 66.7% on orange extraction tasks. Ablation studies confirm that multi-head attention coordinating dual-zone observations provides 13% improvements for contact-aware manipulation. Hardware designs and firmware are available at https://anonymous.4open.science/api/repo/FlexiCup-DA7D/file/index.html?v=8f531b44.
UltraTac: Integrated Ultrasound-Augmented Visuotactile Sensor for Enhanced Robotic Perception
Aug 29, 2025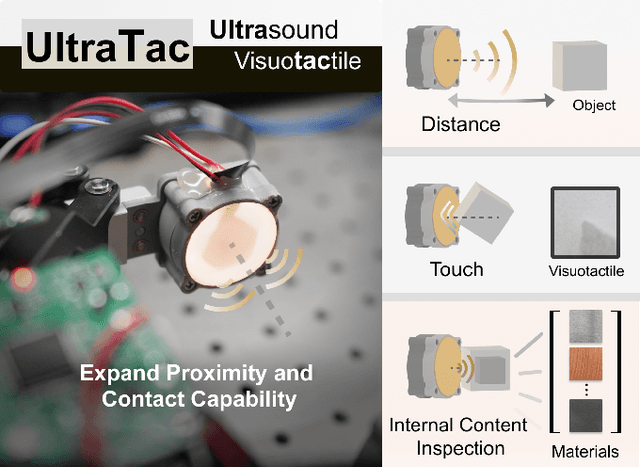
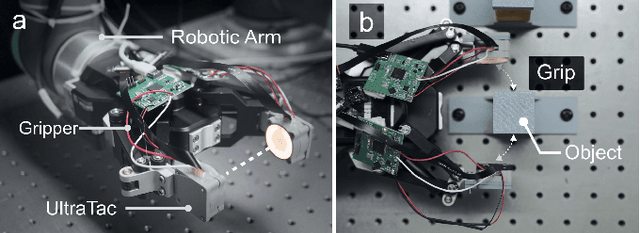
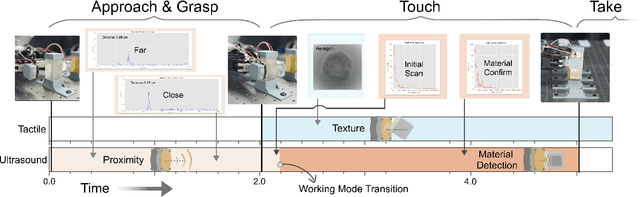
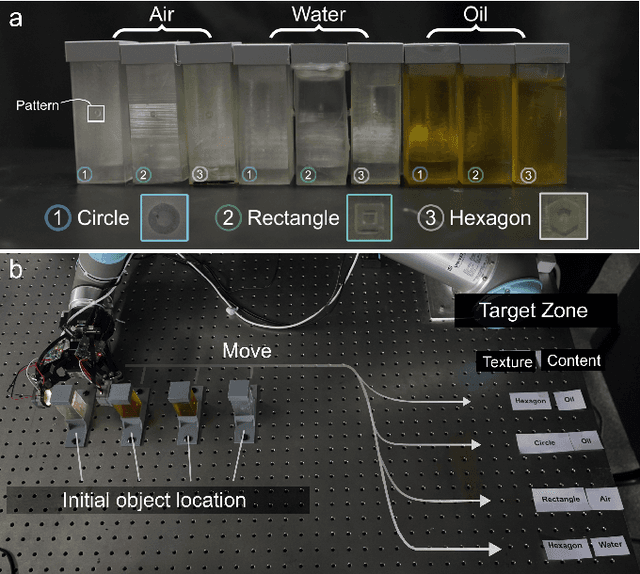
Visuotactile sensors provide high-resolution tactile information but are incapable of perceiving the material features of objects. We present UltraTac, an integrated sensor that combines visuotactile imaging with ultrasound sensing through a coaxial optoacoustic architecture. The design shares structural components and achieves consistent sensing regions for both modalities. Additionally, we incorporate acoustic matching into the traditional visuotactile sensor structure, enabling integration of the ultrasound sensing modality without compromising visuotactile performance. Through tactile feedback, we dynamically adjust the operating state of the ultrasound module to achieve flexible functional coordination. Systematic experiments demonstrate three key capabilities: proximity sensing in the 3-8 cm range ($R^2=0.90$), material classification (average accuracy: 99.20%), and texture-material dual-mode object recognition achieving 92.11% accuracy on a 15-class task. Finally, we integrate the sensor into a robotic manipulation system to concurrently detect container surface patterns and internal content, which verifies its potential for advanced human-machine interaction and precise robotic manipulation.
Chemistry3D: Robotic Interaction Benchmark for Chemistry Experiments
Jun 12, 2024The advent of simulation engines has revolutionized learning and operational efficiency for robots, offering cost-effective and swift pipelines. However, the lack of a universal simulation platform tailored for chemical scenarios impedes progress in robotic manipulation and visualization of reaction processes. Addressing this void, we present Chemistry3D, an innovative toolkit that integrates extensive chemical and robotic knowledge. Chemistry3D not only enables robots to perform chemical experiments but also provides real-time visualization of temperature, color, and pH changes during reactions. Built on the NVIDIA Omniverse platform, Chemistry3D offers interfaces for robot operation, visual inspection, and liquid flow control, facilitating the simulation of special objects such as liquids and transparent entities. Leveraging this toolkit, we have devised RL tasks, object detection, and robot operation scenarios. Additionally, to discern disparities between the rendering engine and the real world, we conducted transparent object detection experiments using Sim2Real, validating the toolkit's exceptional simulation performance. The source code is available at https://github.com/huangyan28/Chemistry3D, and a related tutorial can be found at https://www.omni-chemistry.com.