 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUltraTac: Integrated Ultrasound-Augmented Visuotactile Sensor for Enhanced Robotic Perception
Paper and Code
Aug 29, 2025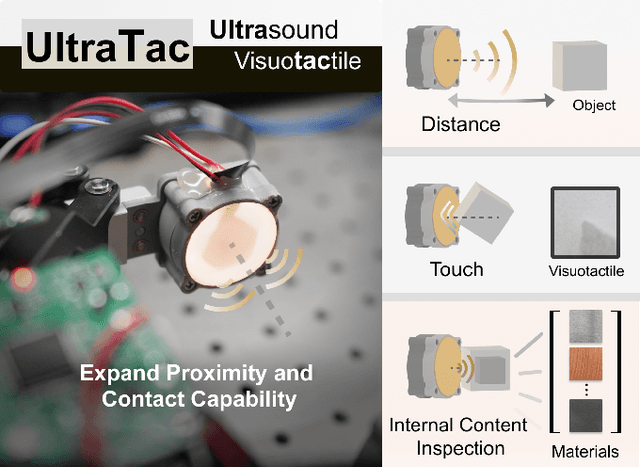
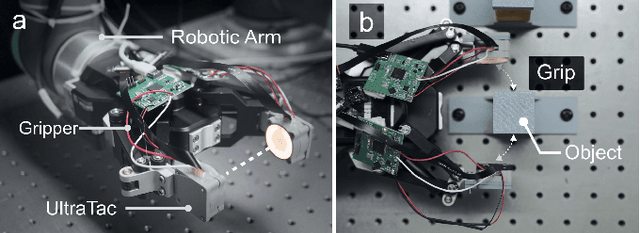
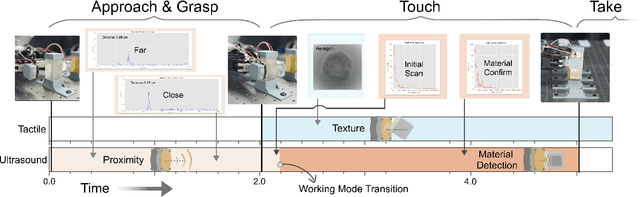
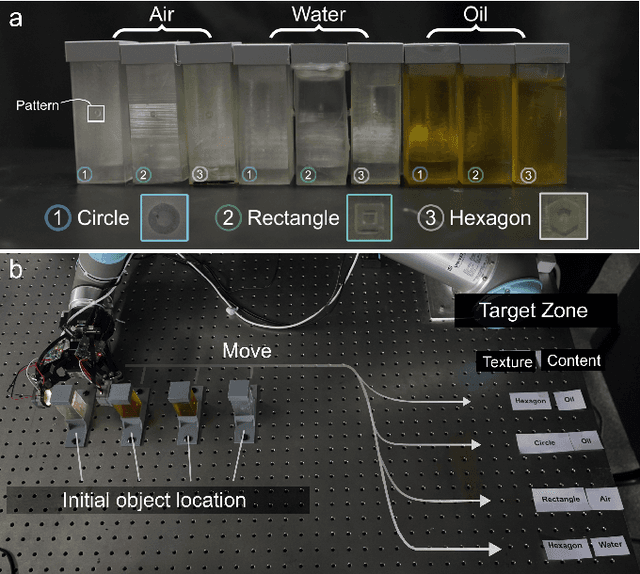
Visuotactile sensors provide high-resolution tactile information but are incapable of perceiving the material features of objects. We present UltraTac, an integrated sensor that combines visuotactile imaging with ultrasound sensing through a coaxial optoacoustic architecture. The design shares structural components and achieves consistent sensing regions for both modalities. Additionally, we incorporate acoustic matching into the traditional visuotactile sensor structure, enabling integration of the ultrasound sensing modality without compromising visuotactile performance. Through tactile feedback, we dynamically adjust the operating state of the ultrasound module to achieve flexible functional coordination. Systematic experiments demonstrate three key capabilities: proximity sensing in the 3-8 cm range ($R^2=0.90$), material classification (average accuracy: 99.20%), and texture-material dual-mode object recognition achieving 92.11% accuracy on a 15-class task. Finally, we integrate the sensor into a robotic manipulation system to concurrently detect container surface patterns and internal content, which verifies its potential for advanced human-machine interaction and precise robotic manipulation.