 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFeasibility Retargeting for Multi-contact Teleoperation and Physical Interaction
Aug 07, 2023



This short paper outlines two recent works on multi-contact teleoperation and the development of the SEIKO (Sequential Equilibrium Inverse Kinematic Optimization) framework. SEIKO adapts commands from the operator in real-time and ensures that the reference configuration sent to the underlying controller is feasible. Additionally, an admittance scheme is used to implement physical interaction, which is then combined with the operator's command and retargeted. SEIKO has been applied in simulations on various robots, including humanoid and quadruped robots designed for loco-manipulation. Furthermore, SEIKO has been tested on real hardware for bimanual heavy object carrying tasks.
Achieving Dexterous Bidirectional Interaction in Uncertain Conditions for Medical Robotics
Jun 20, 2022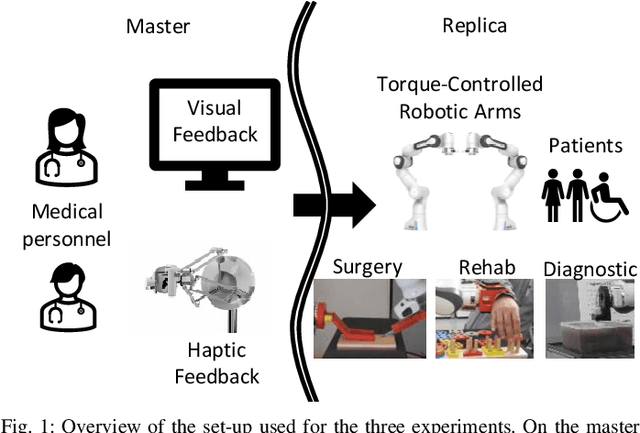
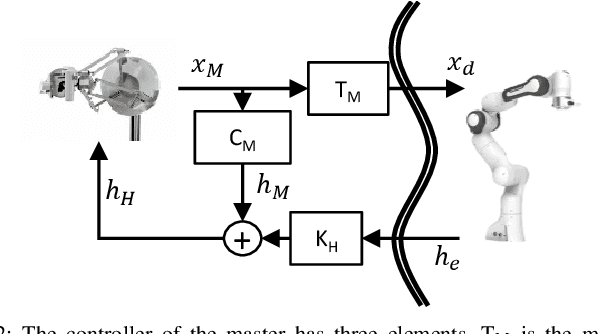
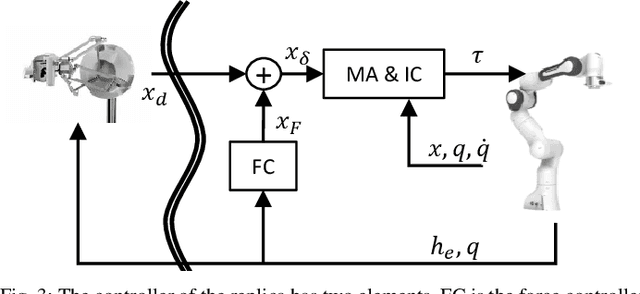
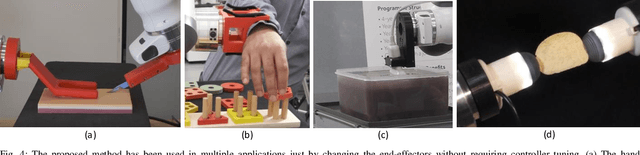
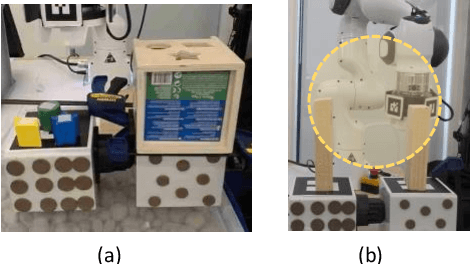
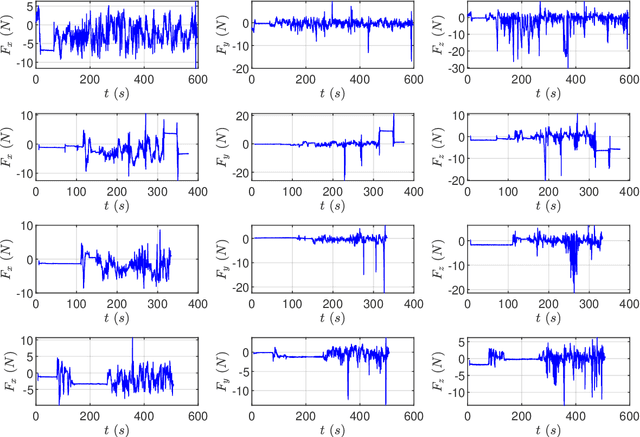
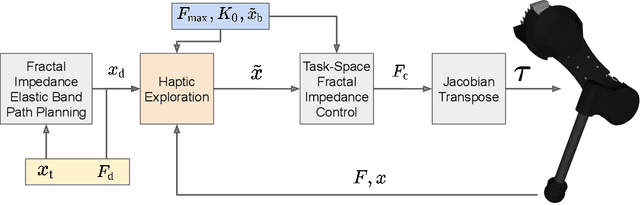
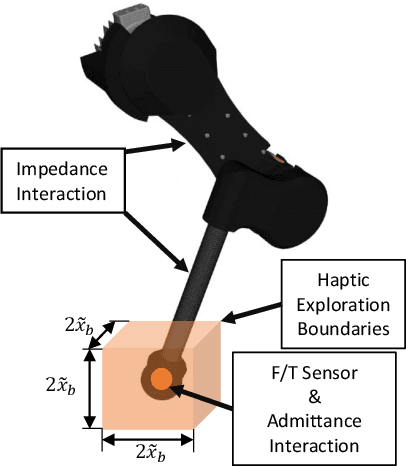
Medical robotics can help improve and extend the reach of healthcare services. A major challenge for medical robots is the complex physical interaction between the robot and the patients which is required to be safe. This work presents the preliminary evaluation of a recently introduced control architecture based on the Fractal Impedance Control (FIC) in medical applications. The deployed FIC architecture is robust to delay between the master and the replica robots. It can switch online between an admittance and impedance behaviour, and it is robust to interaction with unstructured environments. Our experiments analyse three scenarios: teleoperated surgery, rehabilitation, and remote ultrasound scan. The experiments did not require any adjustment of the robot tuning, which is essential in medical applications where the operators do not have an engineering background required to tune the controller. Our results show that is possible to teleoperate the robot to cut using a scalpel, do an ultrasound scan, and perform remote occupational therapy. However, our experiments also highlighted the need for a better robots embodiment to precisely control the system in 3D dynamic tasks.
Collaborative Bimanual Manipulation Using Optimal Motion Adaptation and Interaction Control
Jun 01, 2022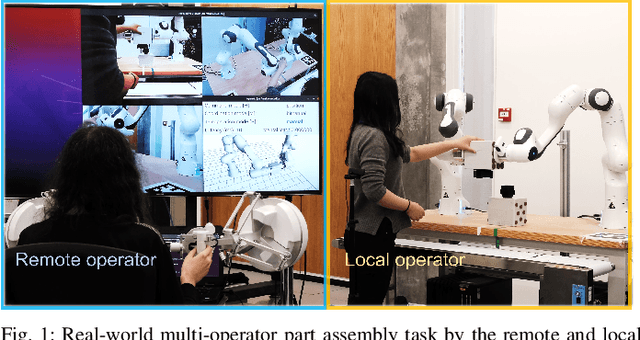
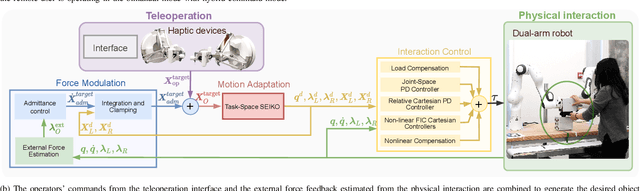
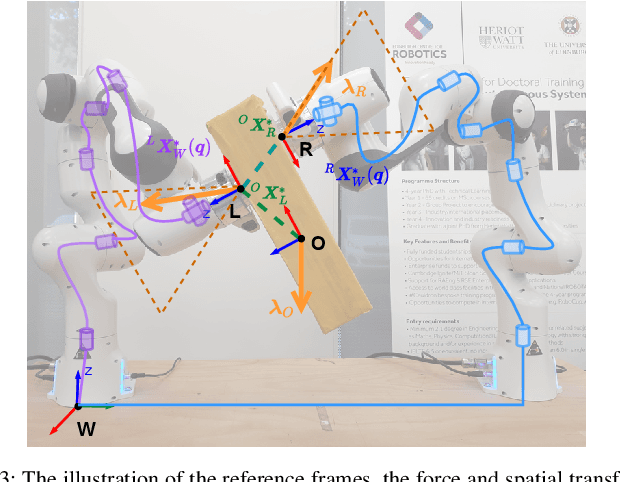
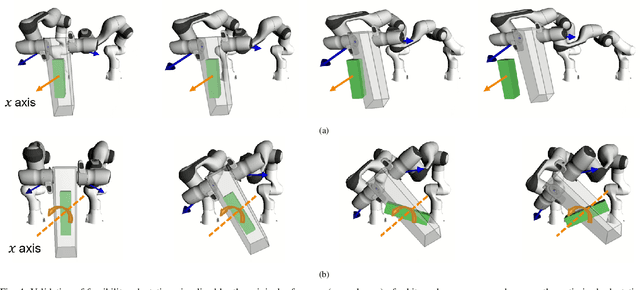
This work developed collaborative bimanual manipulation for reliable and safe human-robot collaboration, which allows remote and local human operators to work interactively for bimanual tasks. We proposed an optimal motion adaptation to retarget arbitrary commands from multiple human operators into feasible control references. The collaborative manipulation framework has three main modules: (1) contact force modulation for compliant physical interactions with objects via admittance control; (2) task-space sequential equilibrium and inverse kinematics optimization, which adapts interactive commands from multiple operators to feasible motions by satisfying the task constraints and physical limits of the robots; and (3) an interaction controller adopted from the fractal impedance control, which is robust to time delay and stable to superimpose multiple control efforts for generating desired joint torques and controlling the dual-arm robots. Extensive experiments demonstrated the capability of the collaborative bimanual framework, including (1) dual-arm teleoperation that adapts arbitrary infeasible commands that violate joint torque limits into continuous operations within safe boundaries, compared to failures without the proposed optimization; (2) robust maneuver of a stack of objects via physical interactions in presence of model inaccuracy; (3) collaborative multi-operator part assembly, and teleoperated industrial connector insertion, which validate the guaranteed stability of reliable human-robot co-manipulation.
Fine Manipulation and Dynamic Interaction in Haptic Teleoperation
Sep 09, 2021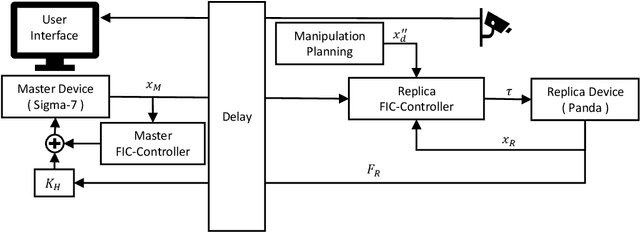

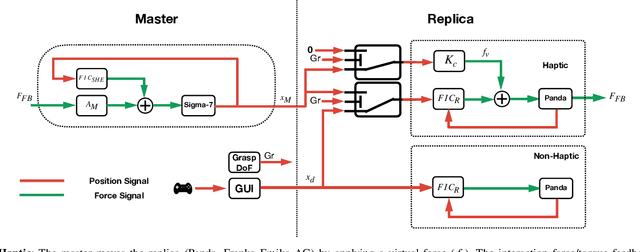
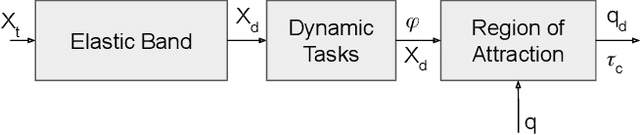
Teleoperation of robots enables remote intervention in distant and dangerous tasks without putting the operator in harm's way. However, remote operation faces fundamental challenges due to limits in communication delay and bandwidth. The proposed work improves the performances of teleoperation architecture based on Fractal Impedance Controller (FIC), by integrating the most recent manipulation architecture in the haptic teleoperation pipeline. The updated controller takes advantage of the inverse kinematics optimisation in the manipulation, and hence improves dynamic interactions during fine manipulation without renouncing the robustness of the FIC controller. Additionally, the proposed method allows an online trade-off between the manipulation controller and the teleoperated behaviour, allowing a safe superimposition of these two behaviours. The validated experimental results show that the proposed method is robust to reduced communication bandwidth and delays. Moreover, we demonstrated that the remote teleoperated robot remains stable and safe to interact with, even when the communication with the master side is abruptly interrupted.
Robust Impedance Control for Dexterous Interaction Using Fractal Impedance Controller with IK-Optimisation
Sep 09, 2021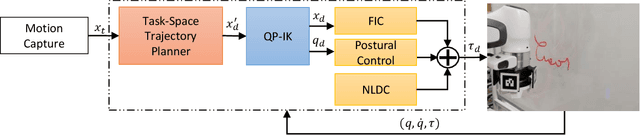
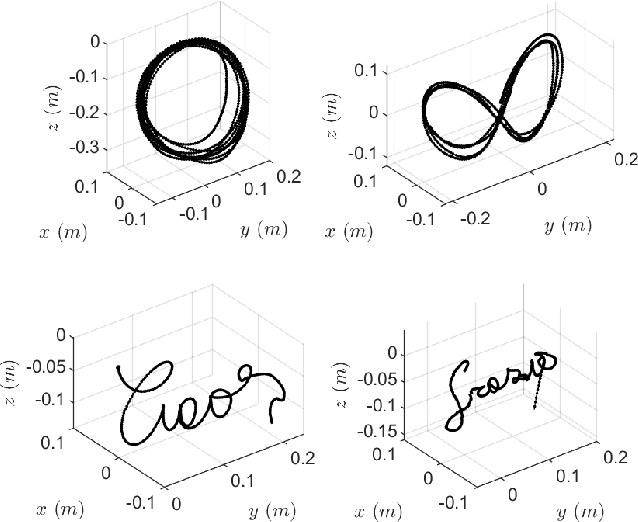
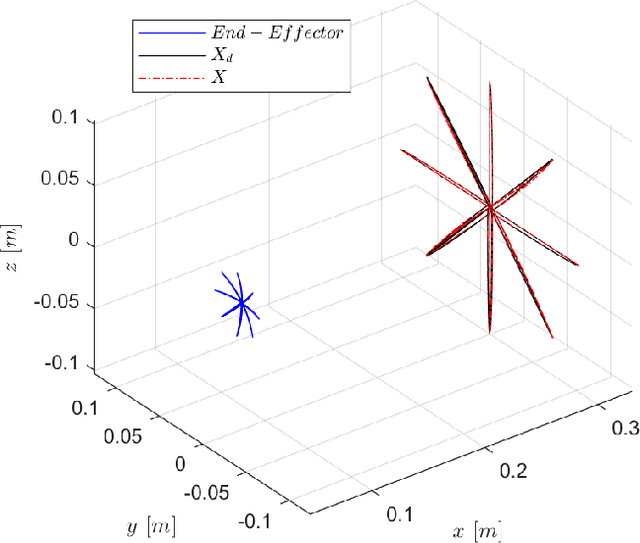
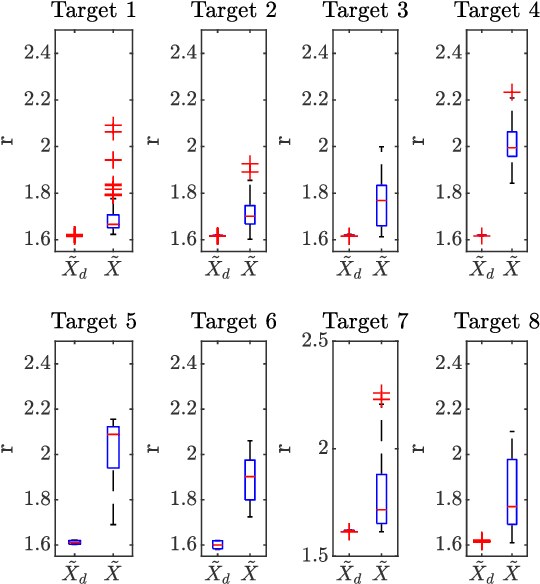
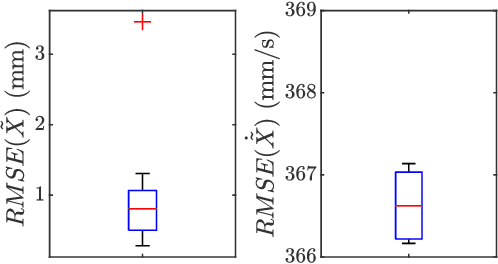
Robust dynamic interactions are required to move robots in daily environments alongside humans. Optimisation and learning methods have been used to mimic and reproduce human movements. However, they are often not robust and their generalisation is limited. This work proposed a hierarchical control architecture for robot manipulators and provided capabilities of reproducing human-like motions during unknown interaction dynamics. Our results show that the reproduced end-effector trajectories can preserve the main characteristics of the initial human motion recorded via a motion capture system, and are robust against external perturbations. The data indicate that some detailed movements are hard to reproduce due to the physical limits of the hardware that cannot reach the same velocity recorded in human movements. Nevertheless, these technical problems can be addressed by using better hardware and our proposed algorithms can still be applied to produce imitated motions.
Robust and Dexterous Dual-arm Tele-Cooperation using Fractal Impedance Control
Aug 10, 2021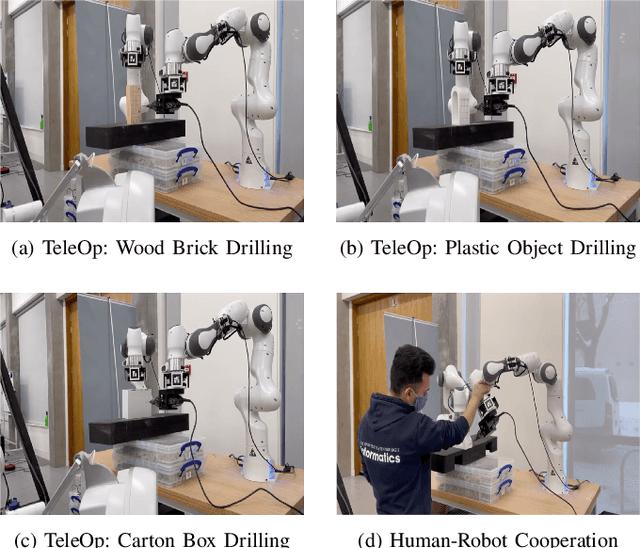
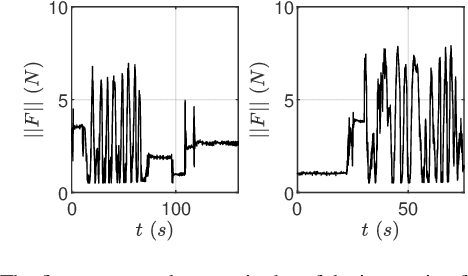
Deploying robots from isolated operations to shared environments has been an increasing trend in robotics for the last decades. However, the requirement of robust interaction in highly variable environments is still beyond the capability of most robots. We proposed to achieve robustness of various interactions by using the Fractal Impedance Control (FIC) and exploiting its non-linear stiffness to adapt to multiple cooperative scenarios, which is applicable to both manipulation and teleoperation applications. The proposed method was evaluated by a wide range of experiments: drilling, moving objects with unknown dynamics, and interacting with humans. The extensive validations demonstrated that the proposed method is very robust in presence of delays and reduced bandwidth in the communication link between master and follower. The results confirmed that the proposed method can enhance the robustness significantly and allow switching tasks freely between manipulation, human-robot cooperation and teleoperation without the need of extensive re-tuning of the controllers.
HapFIC: An Adaptive Force/Position Controller for Safe Environment Interaction in Articulated Systems
Jul 20, 2021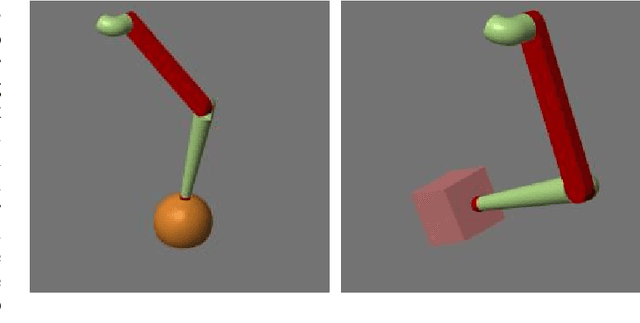
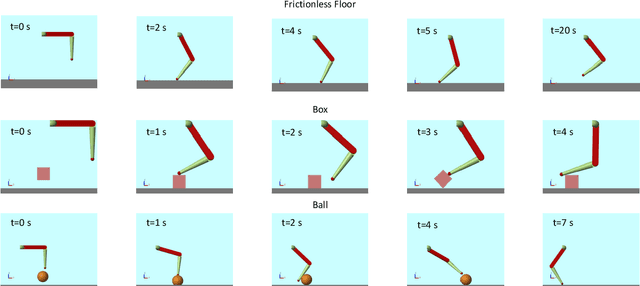
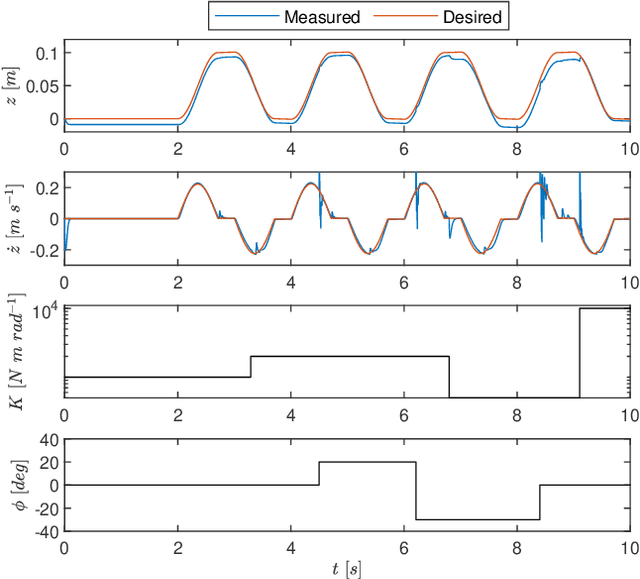
Haptic interaction is essential for the dynamic dexterity of animals, which seamlessly switch from an impedance to an admittance behaviour using the force feedback from their proprioception. However, this ability is extremely challenging to reproduce in robots, especially when dealing with complex interaction dynamics, distributed contacts, and contact switching. Current model-based controllers require accurate interaction modelling to account for contacts and stabilise the interaction. In this manuscript, we propose an adaptive force/position controller that exploits the fractal impedance controller's passivity and non-linearity to execute a finite search algorithm using the force feedback signal from the sensor at the end-effector. The method is computationally inexpensive, opening the possibility to deal with distributed contacts in the future. We evaluated the architecture in physics simulation and showed that the controller can robustly control the interaction with objects of different dynamics without violating the maximum allowable target forces or causing numerical instability even for very rigid objects. The proposed controller can also autonomously deal with contact switching and may find application in multiple fields such as legged locomotion, rehabilitation and assistive robotics.
Geometrical Postural Optimisation of 7-DoF Limb-Like Manipulators
Jul 06, 2021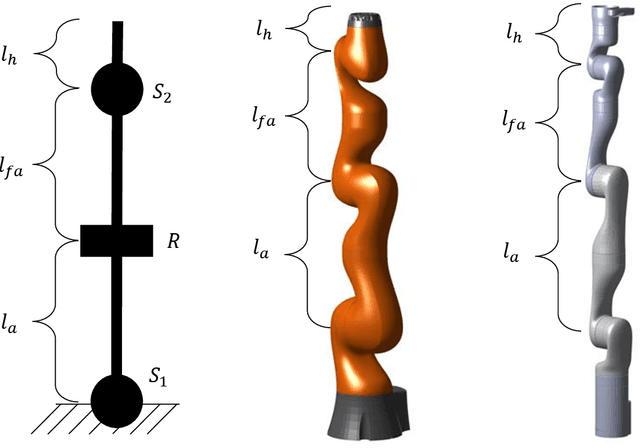
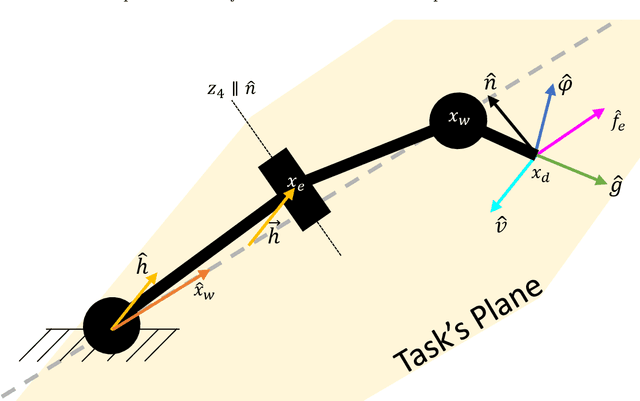
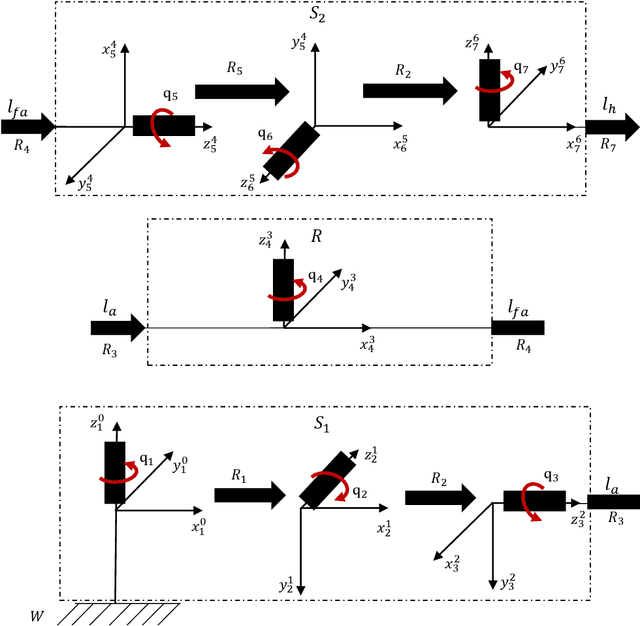
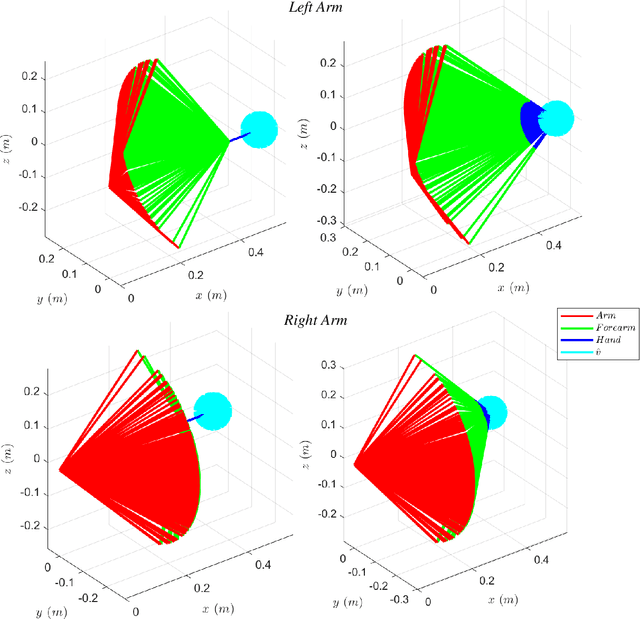
Robots are moving towards applications in less structured environments, but their model-based controllers are challenged by the tasks' complexity and intrinsic environmental unpredictability. Studying biological motor control can provide insights into overcoming these limitations due to the high dexterity and stability observable in humans and animals. This work presents a geometrical solution to the postural optimisation of 7-DoF limbs-like mechanisms, which are robust to singularities and computationally efficient. The theoretical formulation identified two separate decoupled optimisation strategies. The shoulder and elbow strategy align the plane of motion with the expected plane of motion and guarantee the reachability of the end-posture. The wrist strategy ensures the end-effector orientation, which is essential to retain manipulability when nearing a singular configuration. The numerical results confirmed the theoretical observations and allowed us to identify the effect of different grasp strategies on system manipulability. The geometrical method was numerically tested in thousands of configurations proving to be both robust and accurate. The tested scenarios include left and right arm postures, singular configurations, and walking scenarios. The proposed geometrical approach can find application in developing efficient and robust interaction controllers that could be applied in computational neuroscience and robotics.
Exploiting Spherical Projections To Generate Human-Like Wrist Pointing Movements
Mar 08, 2021
The mechanism behind the generation of human movements is of great interest in many fields (e.g. robotics and neuroscience) to improve therapies and technologies. Optimal Feedback Control (OFC) and Passive Motion Paradigm (PMP) are currently two leading theories capable of effectively producing human-like motions, but they require solving nonlinear inverse problems to find a solution. The main benefit of using PMP is the possibility of generating path-independent movements consistent with the stereotypical behaviour observed in humans, while the equivalent OFC formulation is path-dependent. Our results demonstrate how the path-independent behaviour observed for the wrist pointing task can be explained by spherical projections of the planar tasks. The combination of the projections with the fractal impedance controller eliminates the nonlinear inverse problem, which reduces the computational cost compared to previous methodologies. The motion exploits a recently proposed PMP architecture that replaces the nonlinear inverse optimisation with a nonlinear anisotropic stiffness impedance profile generated by the Fractal Impedance Controller, reducing the computational cost and not requiring a task-dependent optimisation.
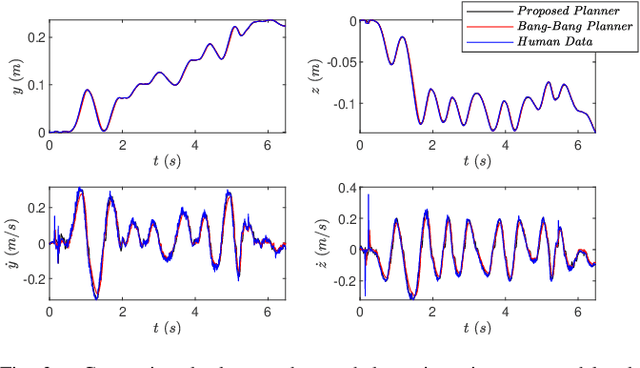
Theoretical Evidence Supporting Harmonic Reaching Trajectories
Dec 01, 2020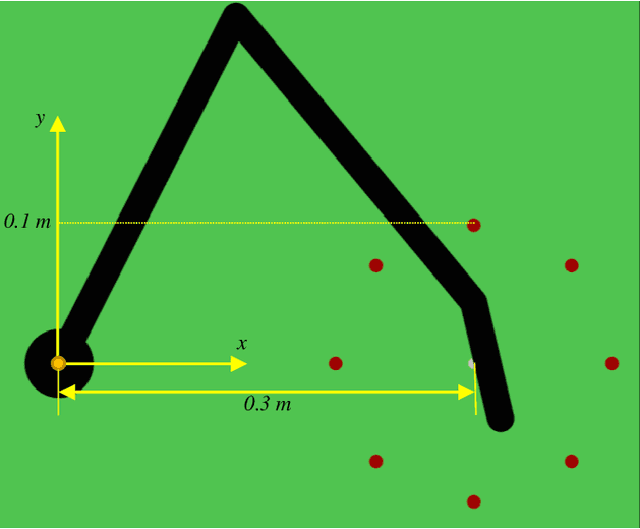

Minimum Jerk trajectories have been long thought to be the reference trajectories for human movements due to their impressive similarity with human movements. Nevertheless, minimum jerk trajectories are not the only choice for $C^\infty$ (i.e., smooth) functions. For example, harmonic trajectories are smooth functions that can be superimposed to describe the evolution of physical systems. This paper analyses the possibility that motor control plans using harmonic trajectories, will be experimentally observed to have a minimum jerk likeness due to control signals being transported through the Central Nervous System (CNS) and muscle-skeletal system. We tested our theory on a 3-link arm simulation using a recently developed planner that we reformulated into a motor control architecture, inspired by the passive motion paradigm. The arm performed 100 movements, reaching for each target defined by the clock experiment. We analysed the shape of the trajectory planned in the CNS and executed in the physical simulator. We observed that even under ideal conditions (i.e., absence of delays and noise) the executed trajectories are similar to a minimum jerk trajectory; thus, supporting the thesis that the human brain might plan harmonic trajectories.