 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Passive Navigation Planning Algorithm for Collision-free Control of Mobile Robots
Nov 01, 2020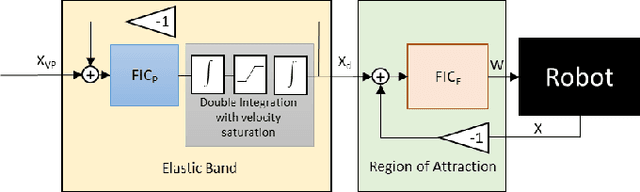
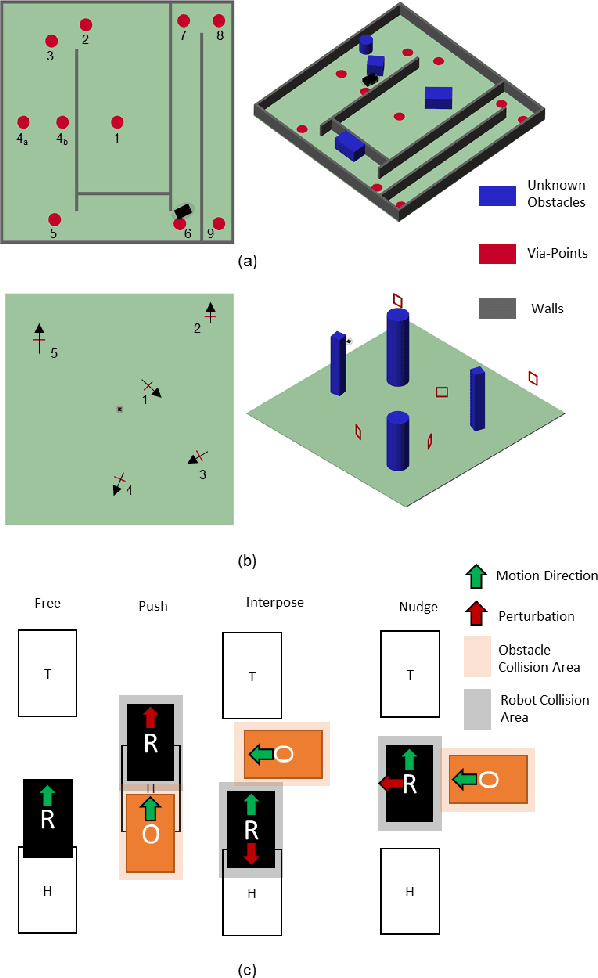
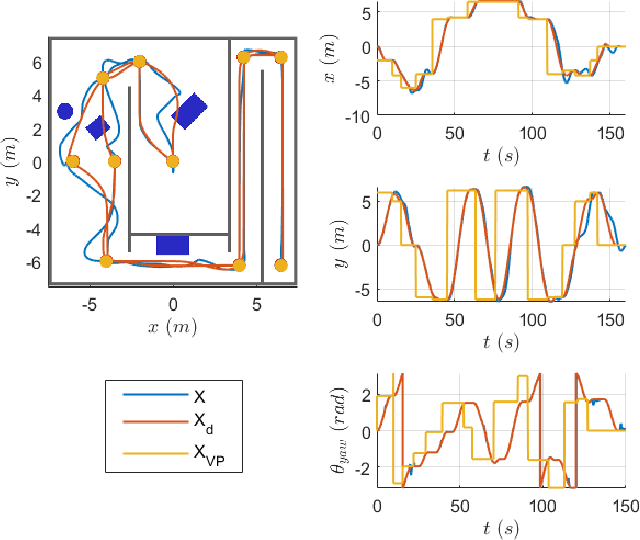
Path planning and collision avoidance are challenging in complex and highly variable environments due to the limited horizon of events. In literature, there are multiple model- and learning-based approaches that require significant computational resources to be effectively deployed and they may have limited generality. We propose a planning algorithm based on a globally stable passive controller that can plan smooth trajectories using limited computational resources in challenging environmental conditions. The architecture combines the recently proposed fractal impedance controller with elastic bands and regions of finite time invariance. As the method is based on an impedance controller, it can also be used directly as a force/torque controller. We validated our method in simulation to analyse the ability of interactive navigation in challenging concave domains via the issuing of via-points, and its robustness to low bandwidth feedback. A swarm simulation using 11 agents validated the scalability of the proposed method. We have performed hardware experiments on a holonomic wheeled platform validating smoothness and robustness of interaction with dynamic agents (i.e., humans and robots). The computational complexity of the proposed local planner enables deployment with low-power micro-controllers lowering the energy consumption compared to other methods that rely upon numeric optimisation.
Online Dynamic Trajectory Optimization and Control for a Quadruped Robot
Sep 02, 2020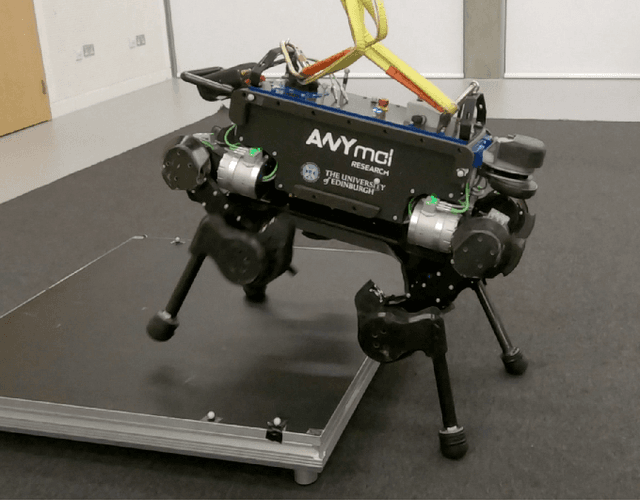
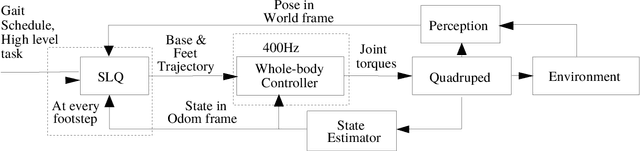
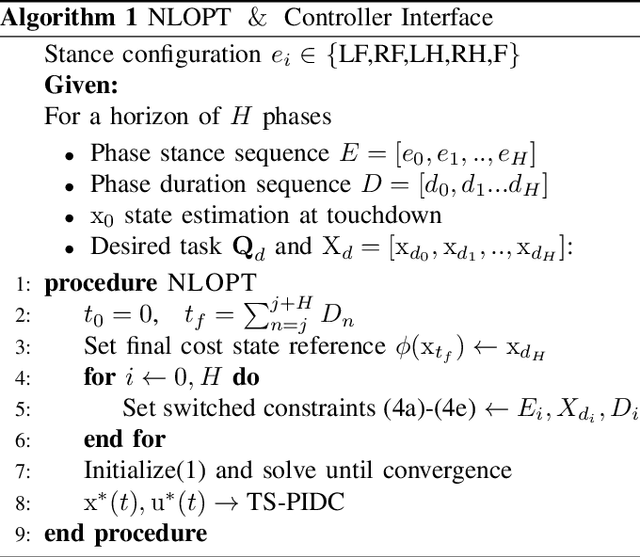

Legged robot locomotion requires the planning of stable reference trajectories, especially while traversing uneven terrain. The proposed trajectory optimization framework is capable of generating dynamically stable base and footstep trajectories for multiple steps. The locomotion task can be defined with contact locations, base motion or both, making the algorithm suitable for multiple scenarios (e.g., presence of moving obstacles). The planner uses a simplified momentum-based task space model for the robot dynamics, allowing computation times that are fast enough for online replanning.This fast planning capabilitiy also enables the quadruped to accommodate for drift and environmental changes. The algorithm is tested on simulation and a real robot across multiple scenarios, which includes uneven terrain, stairs and moving obstacles. The results show that the planner is capable of generating stable trajectories in the real robot even when a box of 15 cm height is placed in front of its path at the last moment.
Variable Autonomy of Whole-body Control for Inspection and Intervention in Industrial Environments using Legged Robots
Apr 06, 2020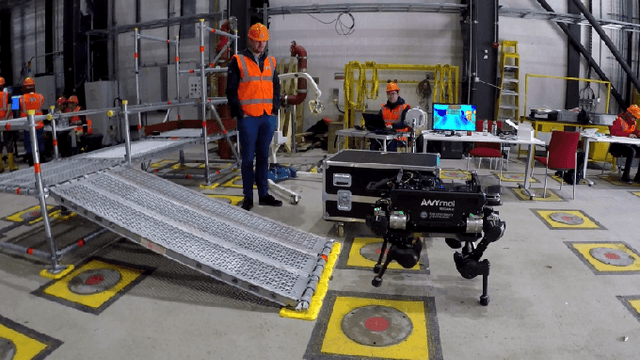
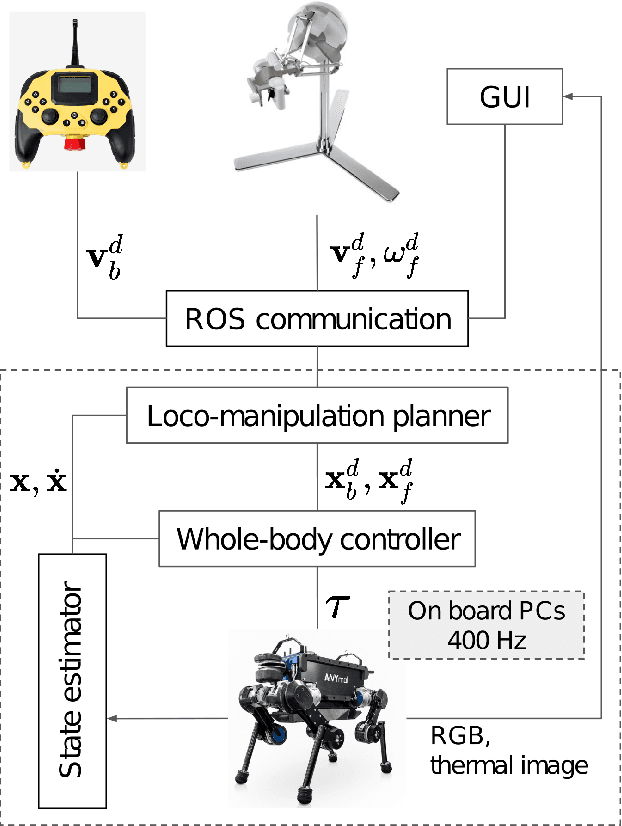
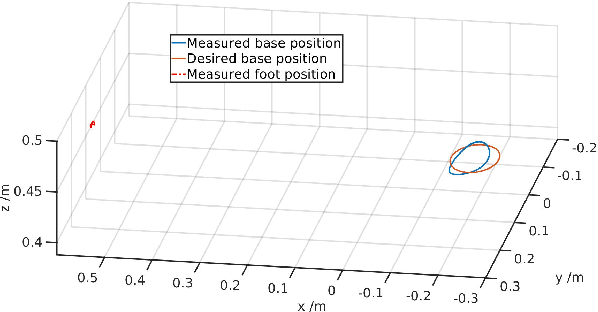
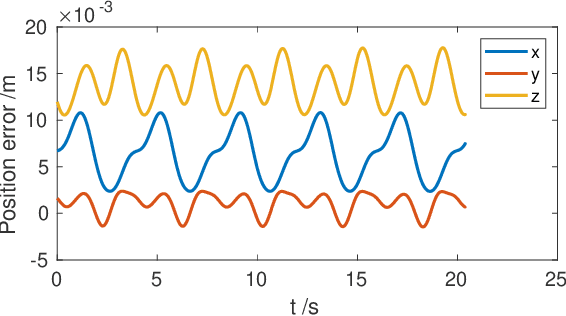
The deployment of robots in industrial and civil scenarios is a viable solution to protect operators from danger and hazards. Shared autonomy is paramount to enable remote control of complex systems such as legged robots, allowing the operator to focus on the essential tasks instead of overly detailed execution. To realize this, we proposed a comprehensive control framework for inspection and intervention using a legged robot and validated the integration of multiple loco-manipulation algorithms optimised for improving the remote operation. The proposed control offers 3 operation modes: fully automated, semi-autonomous, and the haptic interface receiving onsite physical interaction for assisting teleoperation. Our contribution is the design of a QP-based semi-analytical whole-body control, which is the key to the various task completion subject to internal and external constraints. We demonstrated the versatility of the whole-body control in terms of decoupling tasks, singularity toleration and constraint satisfaction. We deployed our solution in field trials and evaluated in an emergency setting by an E-stop while the robot was clearing road barrier and traversing difficult terrains.
Robots in the Danger Zone: Exploring Public Perception through Engagement
Apr 01, 2020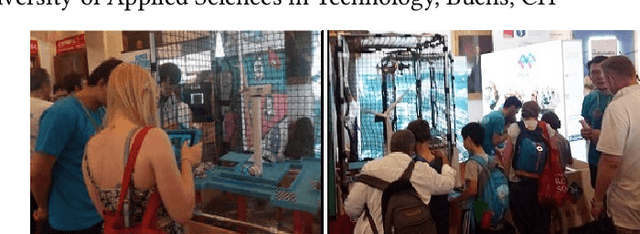
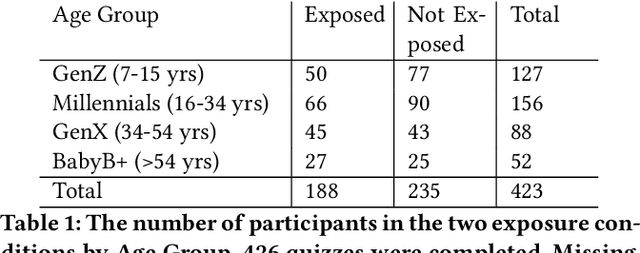
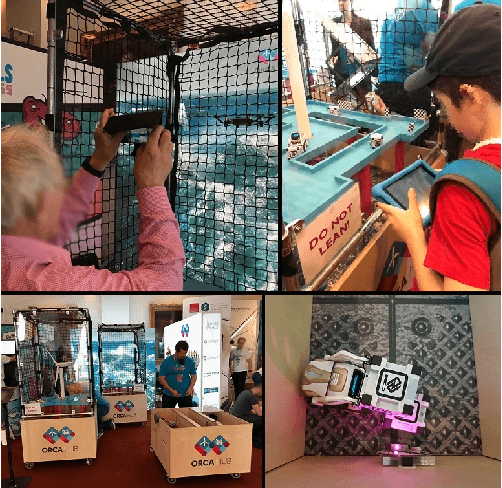
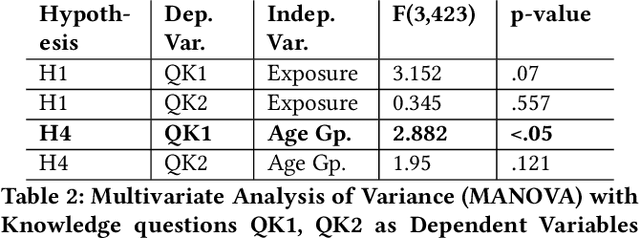
Public perceptions of Robotics and Artificial Intelligence (RAI) are important in the acceptance, uptake, government regulation and research funding of this technology. Recent research has shown that the public's understanding of RAI can be negative or inaccurate. We believe effective public engagement can help ensure that public opinion is better informed. In this paper, we describe our first iteration of a high throughput in-person public engagement activity. We describe the use of a light touch quiz-format survey instrument to integrate in-the-wild research participation into the engagement, allowing us to probe both the effectiveness of our engagement strategy, and public perceptions of the future roles of robots and humans working in dangerous settings, such as in the off-shore energy sector. We critique our methods and share interesting results into generational differences within the public's view of the future of Robotics and AI in hazardous environments. These findings include that older peoples' views about the future of robots in hazardous environments were not swayed by exposure to our exhibit, while the views of younger people were affected by our exhibit, leading us to consider carefully in future how to more effectively engage with and inform older people.
* Accepted in HRI 2020, Keywords: Human robot interaction, robotics, artificial intelligence, public engagement, public perceptions of robots, robotics and society
Bio-mimetic Adaptive Force/Position Control Using Fractal Impedance
Mar 03, 2020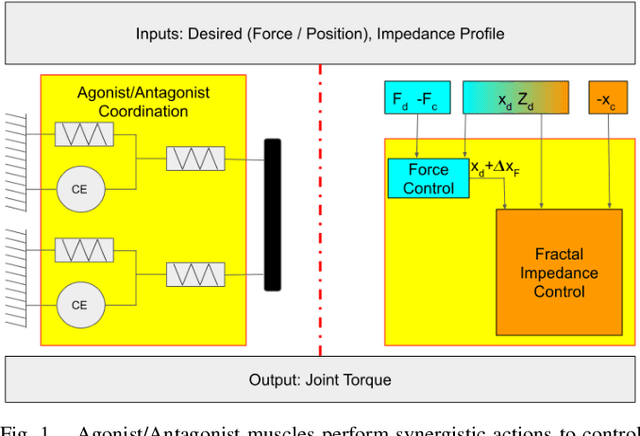
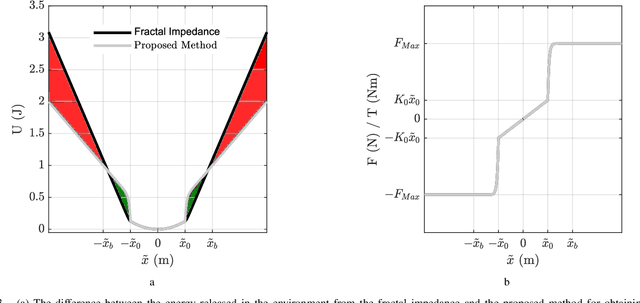
The ability of animals to interact with complex dynamics is unmatched in robots. Especially important to the interaction performances is the online adaptation of body dynamics, which can be modeled as an impedance behaviour. However, the variable impedance controller still possesses a challenge in the current control frameworks due to the difficulties of retaining stability when adapting the controller gains. The fractal impedance controller has been recently proposed to solve this issue. However, it still has limitations such as sudden jumps in force when it starts to converge to the desired position and the lack of a force feedback loop. In this manuscript, two improvements are made to the control framework to solve these limitations. The force discontinuity has been addressed introducing a modulation of the impedance via a virtual antagonist that modulates the output force. The force tracking has been modeled after the parallel force/position controller architecture. In contrast to traditional methods, the fractal impedance controller enables the implementation of a search algorithm on the force feedback to adapt its behaviour on the external environment instead of on relying on \textit{a priori} knowledge of the external dynamics. Preliminary simulation results presented in this paper show the feasibility of the proposed approach, and it allows to evaluate the trade-off that needs to be made when relying on the proposed controller for interaction. In conclusion, the proposed method mimics the behaviour of an agonist/antagonist system adapting to unknown external dynamics, and it may find application in computational neuroscience, haptics, and interaction control.
Robust High-Transparency Haptic Exploration for Dexterous Telemanipulation
Mar 03, 2020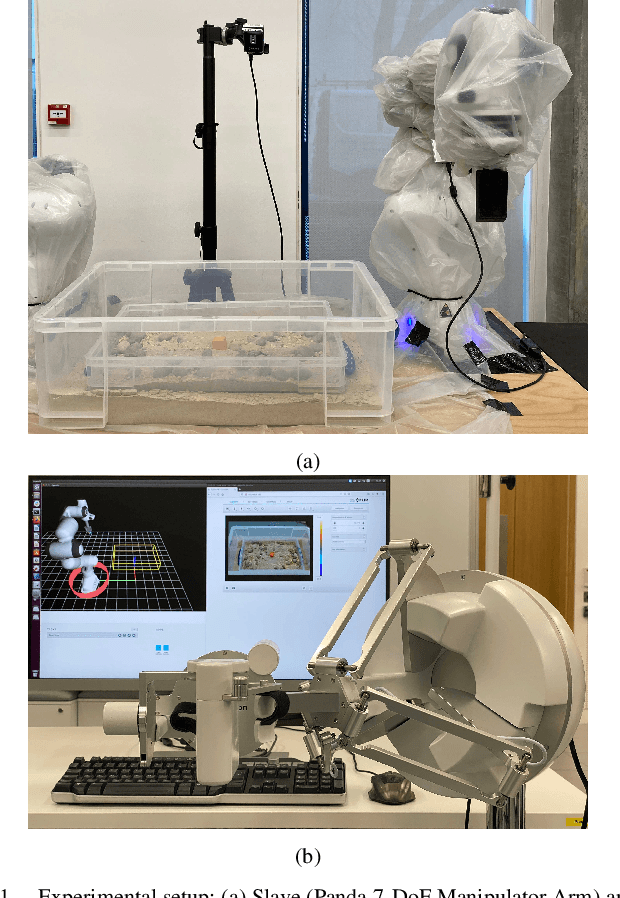
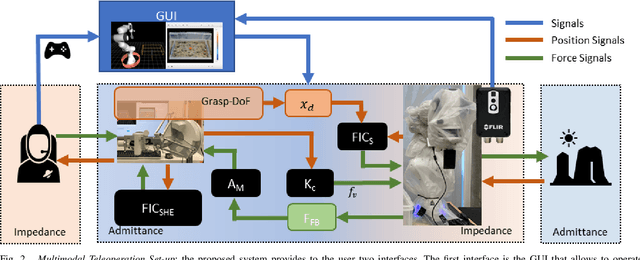
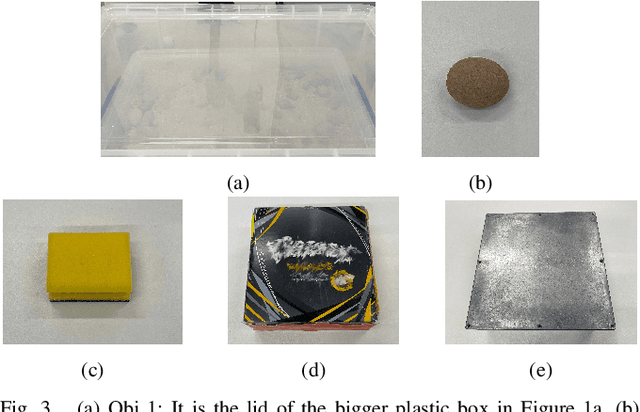
Robot teleoperation has been proposed as a solution to perform complex tasks in dangerous or remote environments. Teleoperation dexterity is not yet sufficient to enable effective interaction control, even in short-range operation, and low communication delays between the slave and the master. This manuscript explores the development of a haptic teleoperation setup that relies upon a recently proposed passive impedance controller, called Fractal Impedance Controller (FIC). The controller has a state-dependent impedance which enables to tune the slave task accuracy. The proposed controller has been compared with a similar setup using a traditional impedance controller. The results show that the proposed control architecture has higher transparency of interaction compared to the impedance controller. A preliminary study on the ability of an expert user to perform dexterous tasks has been conducted maintaining constant controller parameters. The tasks included opening an electrical box, driving a pile in the sand, pushing a ball on rough terrain, moving a sponge in an obstacle course, and pushing an E-stop button. The results show that the proposed method can complete all the task while the impedance controller on the slave could not. Furthermore, the FIC enables a shorter completion time on the tasks completed that have been also completed from the traditional impedance controller (pushing a ball, moving the sponge, and pushing E-Stop).
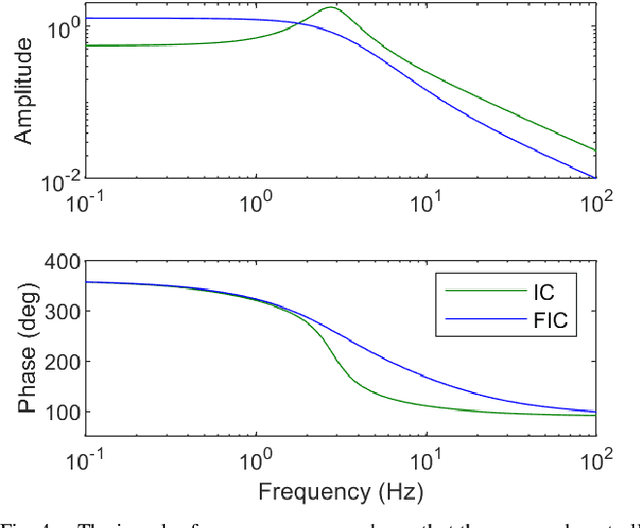
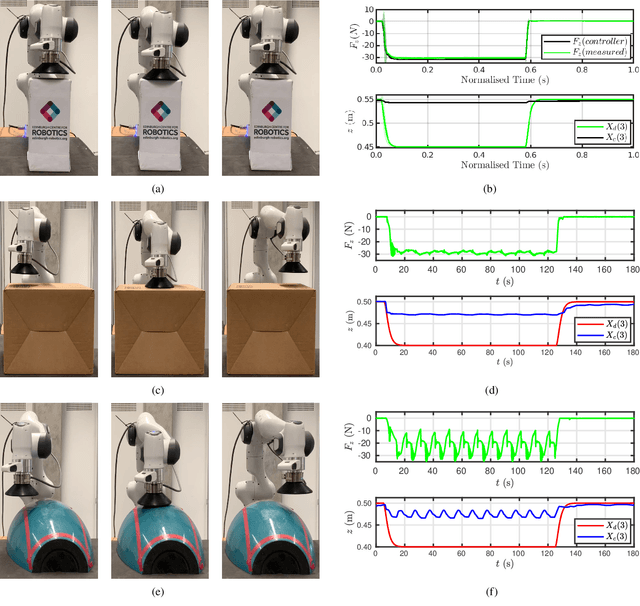
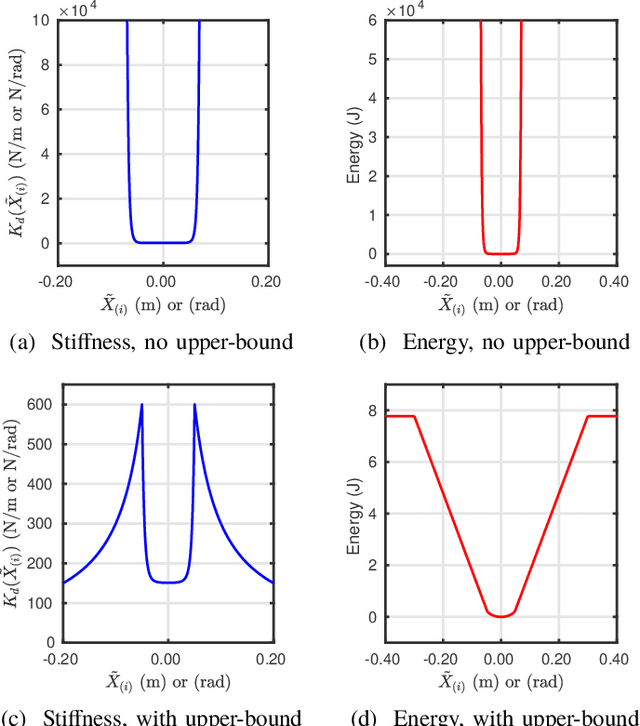
Safe and Compliant Control of Redundant Robots Using a Stack of Passive Task-Space Controllers
Feb 27, 2020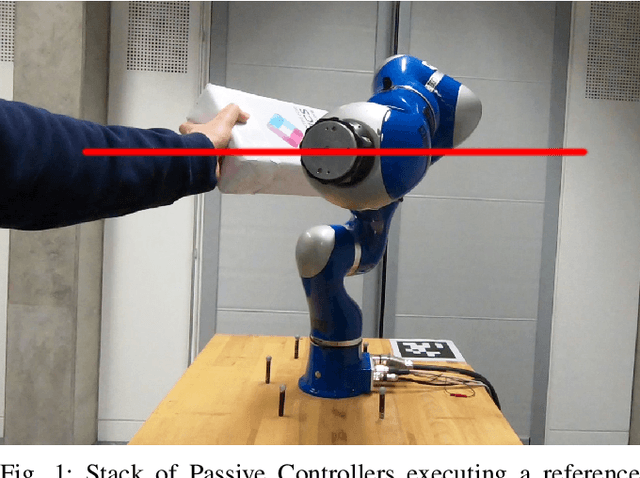
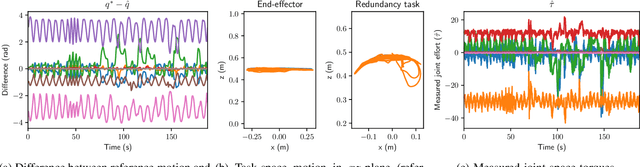
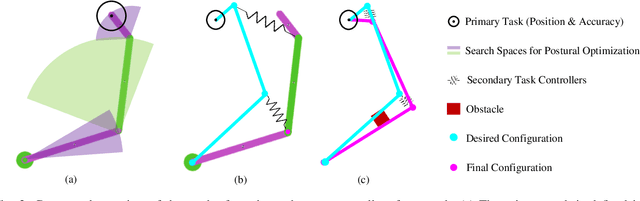
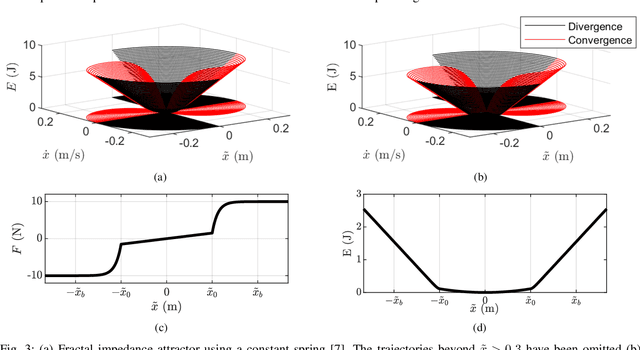
Safe and compliant control of dynamic systems in interaction with the environment, e.g., in shared workspaces, continues to represent a major challenge. Mismatches in the dynamic model of the robots, numerical singularities, and the intrinsic environmental unpredictability are all contributing factors.Online optimization of impedance controllers has recently shown great promise in addressing this challenge, however, their performance is not sufficiently robust to be deployed in challenging environments. This work proposes a compliant control method for redundant manipulators based on a stack of multiple passive task-space controllers. Our control framework of passive controllers is inherently stable, numerically well-conditioned (as no matrix inversions are required), and computationally inexpensive (as no optimization is used). We leverage and introduce a novel stiffness profile for a recently proposed passive controller with smooth transitions between the divergence and convergence phases making it particularly suitable when multiple passive controllers are combined in a stack. Our experimental results demonstrate that the proposed method achieves sub-centimeter tracking performance during dynamic demanding tasks with fast-changing references, while remaining safe to interact with and robust to singularities. The proposed framework achieves this without knowledge of the robot dynamics and thanks to its passivity is intrinsically stable. The data further shows that the robot can fully take advantage of the null-space to maintain the primary task accuracy while compensating for external perturbations.
Optimisation of Body-ground Contact for Augmenting Whole-Body Loco-manipulation of Quadruped Robots
Feb 24, 2020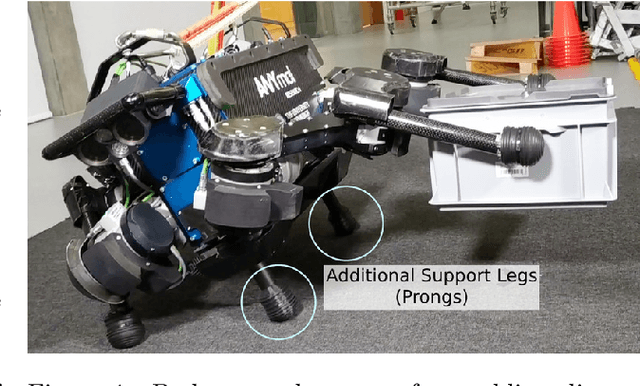

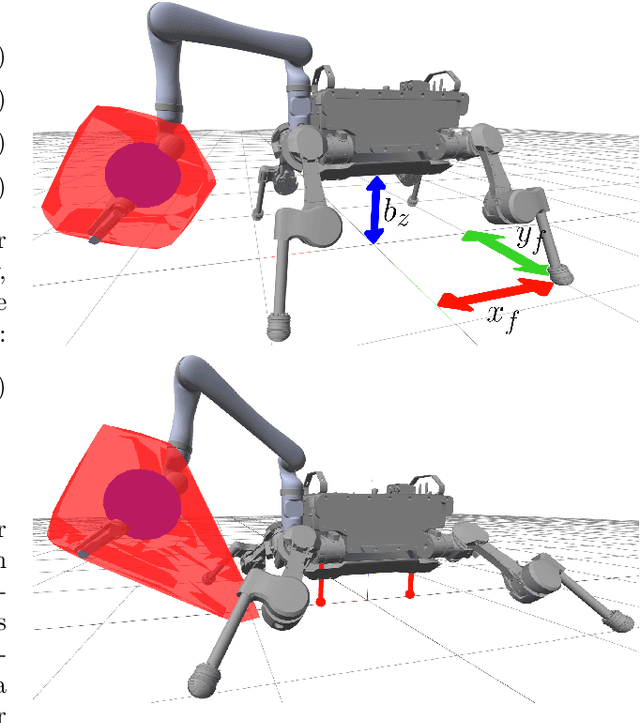
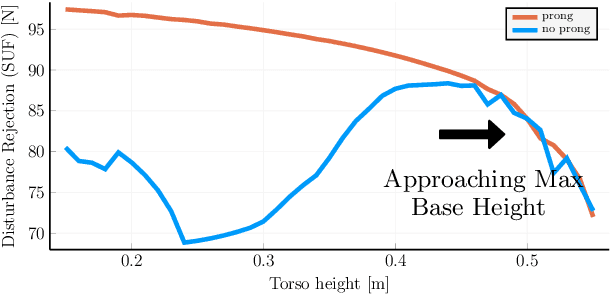
Legged robots have great potential to perform loco-manipulation tasks, yet it is challenging to keep the robot balanced while it interacts with the environment. In this paper we study the use of additional contact points for maximising the robustness of loco-manipulation motions. Specifically, body-ground contact is studied for enhancing robustness and manipulation capabilities of quadrupedal robots. We propose to equip the robot with prongs: small legs rigidly attached to the body which ensure body-ground contact occurs in controllable point-contacts. The effect of these prongs on robustness is quantified by computing the Smallest Unrejectable Force (SUF), a measure of robustness related to Feasible Wrench Polytopes. We apply the SUF to assess the robustness of the system, and propose an effective approximation of the SUF that can be computed at near-real-time speed. We design a hierarchical quadratic programming based whole-body controller that controls stable interaction when the prongs are in contact with the ground. This novel concept of using prongs and the resulting control framework are all implemented on hardware to validate the effectiveness of the increased robustness and newly enabled loco-manipulation tasks, such as obstacle clearance and manipulation of a large object.
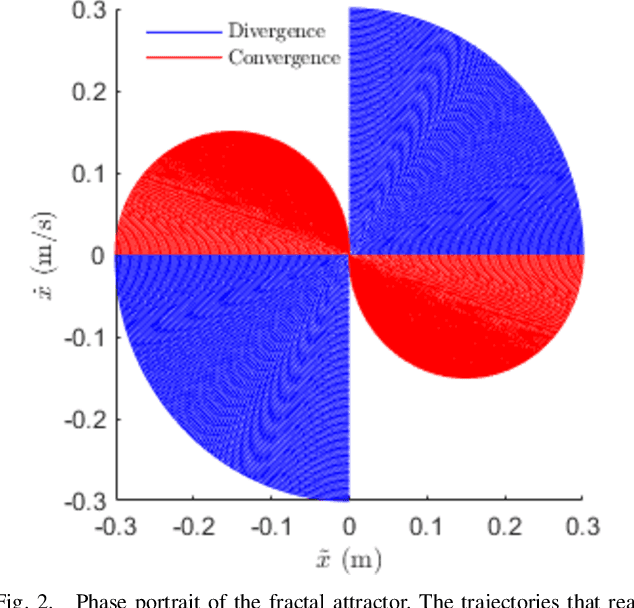
Fractal Impedance for Passive Controllers
Nov 12, 2019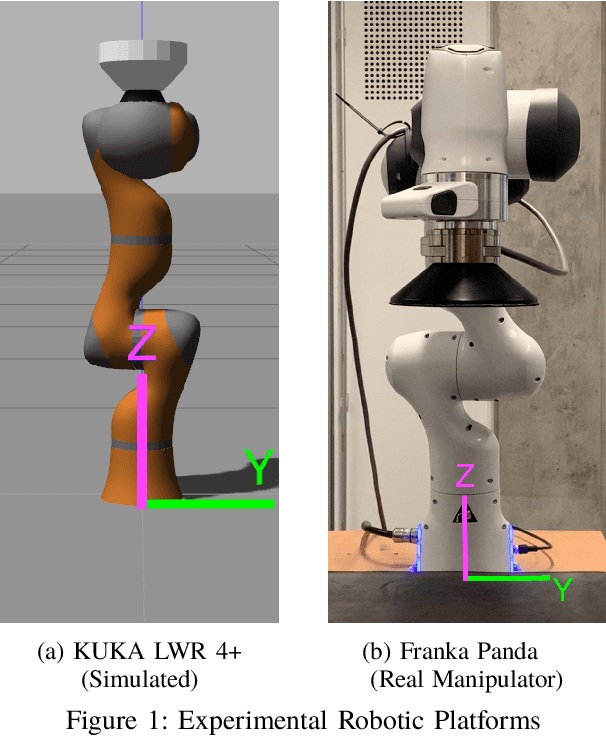
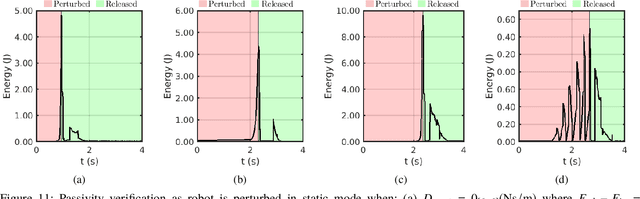
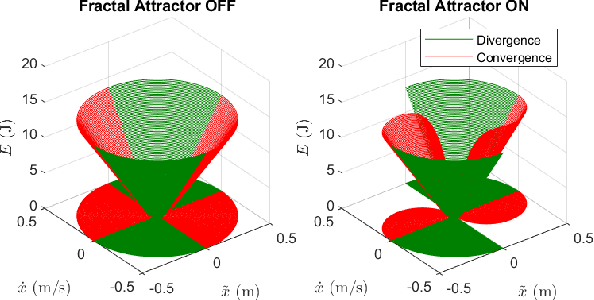
During the last decade, there has been increasing interest in new control frameworks to move robots from their industrial cages to unstructured environments where they may coexist with humans. Despite significant improvement in some specific applications (e.g., medical robotics), there is still the need of a general control framework to improve the robots' dynamics interaction performance without limiting system safety. The passive control framework has shown promising results in this direction; however, it relies on virtual energy tanks that can guarantee passivity as long as they do not run out of energy. In this paper, a fractal attractor is proposed to implement a variable impedance controller that is able to retain passivity without relying on the energy tank framework. The results prove that the proposed method can accurately track trajectories and apply forces at the end-effector. Furthermore, it can automatically deal with the extra energy introduced by changes in interaction conditions, null-space controller and environment. Therefore, These properties make the controller ideal for applications where the dynamic interaction at the end-effector is difficult to be characterized in advance, such as human-robot interaction and unknown dynamics.
Comparing Metrics for Robustness Against External Perturbations in Dynamic Trajectory Optimization
Aug 15, 2019
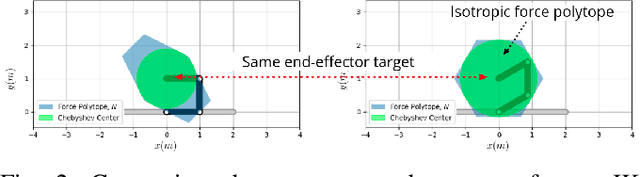
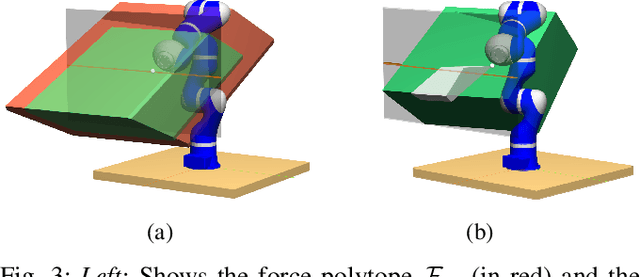
Dynamic trajectory optimization is a popular approach for generating optimal and dynamically consistent trajectories. In order to deal with model errors and perturbations, the trajectories are usually tracked with feedback controllers. Their robustness thus largely depends on the margins of stability and control authority the system retains. Manipulability ellipsoids and force polytopes are well-known tools for evaluating force and motion capabilities of robot manipulators. Increased control authority can be achieved by incorporating task constraints within those tools. However, they come with an increased computational cost. Additionally, their impact on resulting trajectory quality and control authority has not yet been benchmarked and compared. In this letter, we introduce a novel robustness metric, the residual force polytope, which takes the nominal torque required to maintain a posture into account. We further detail a benchmarking protocol including evaluation criteria and visualization tools to compare robustness metrics in dynamic trajectory optimization. To foster benchmarking and allow for reproducibility, we open source a flexible framework for dynamic trajectory optimization via direct transcription along with our benchmark protocols as supplementary materials. Finally, we include - to the best of our knowledge - the first holistic comparison between traditional energy minimization metrics, kinematic manipulability maximization, and force polytope methods.