 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluation of the Benefits of Zero Velocity Update in Decentralized EKF-Based Cooperative Localization Algorithms for GNSS-Denied Multi-Robot Systems
Jun 30, 2023



This paper proposes the cooperative use of zero velocity update (ZU) in a decentralized extended Kalman filter (DEKF) based localization algorithm for multi-robot systems. The filter utilizes inertial measurement unit (IMU), ultra-wideband (UWB), and odometry velocity measurements to improve the localization performance of the system in the presence of a GNSS-denied environment. The contribution of this work is to evaluate the benefits of using ZU in a DEKF-based localization algorithm. The algorithm is tested with real hardware in a video motion capture facility and a Robot Operating System (ROS) based simulation environment for unmanned ground vehicles (UGV). Both simulation and real-world experiments are performed to show the effectiveness of using ZU in one robot to reinstate the localization of other robots in a multi-robot system. Experimental results from GNSS-denied simulation and real-world environments show that using ZU with simple heuristics in the DEKF significantly improves the 3D localization accuracy.
ZUPT Aided GNSS Factor Graph with Inertial Navigation Integration for Wheeled Robots
Dec 14, 2021
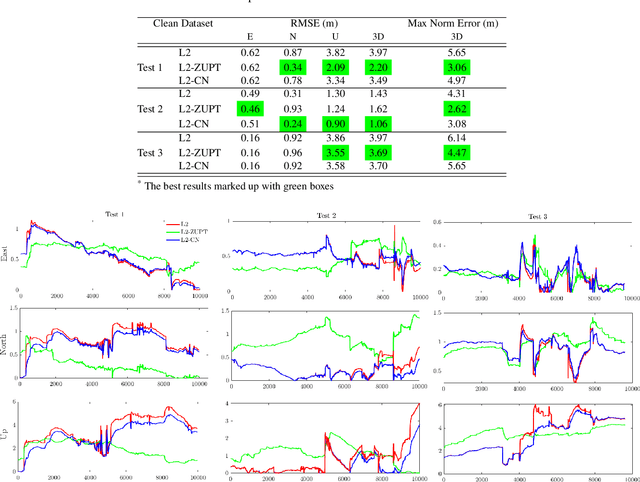
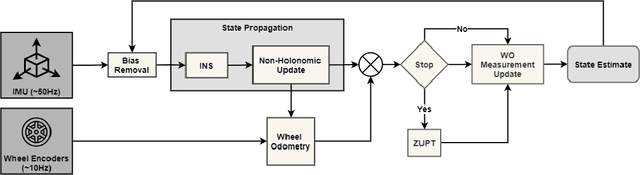

In this work, we demonstrate the importance of zero velocity information for global navigation satellite system (GNSS) based navigation. The effectiveness of using the zero velocity information with zero velocity update (ZUPT) for inertial navigation applications have been shown in the literature. Here we leverage this information and add it as a position constraint in a GNSS factor graph. We also compare its performance to a GNSS/inertial navigation system (INS) coupled factor graph. We tested our ZUPT aided factor graph method on three datasets and compared it with the GNSS-only factor graph.