 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrinciple Driven Parameterized Fiber Model based on GPT-PINN Neural Network
Aug 19, 2024In cater the need of Beyond 5G communications, large numbers of data driven artificial intelligence based fiber models has been put forward as to utilize artificial intelligence's regression ability to predict pulse evolution in fiber transmission at a much faster speed compared with the traditional split step Fourier method. In order to increase the physical interpretabiliy, principle driven fiber models have been proposed which inserts the Nonlinear Schodinger Equation into their loss functions. However, regardless of either principle driven or data driven models, they need to be re-trained the whole model under different transmission conditions. Unfortunately, this situation can be unavoidable when conducting the fiber communication optimization work. If the scale of different transmission conditions is large, then the whole model needs to be retrained large numbers of time with relatively large scale of parameters which may consume higher time costs. Computing efficiency will be dragged down as well. In order to address this problem, we propose the principle driven parameterized fiber model in this manuscript. This model breaks down the predicted NLSE solution with respect to one set of transmission condition into the linear combination of several eigen solutions which were outputted by each pre-trained principle driven fiber model via the reduced basis method. Therefore, the model can greatly alleviate the heavy burden of re-training since only the linear combination coefficients need to be found when changing the transmission condition. Not only strong physical interpretability can the model posses, but also higher computing efficiency can be obtained. Under the demonstration, the model's computational complexity is 0.0113% of split step Fourier method and 1% of the previously proposed principle driven fiber model.
Fiber Transmission Model with Parameterized Inputs based on GPT-PINN Neural Network
Aug 19, 2024



In this manuscript, a novelty principle driven fiber transmission model for short-distance transmission with parameterized inputs is put forward. By taking into the account of the previously proposed principle driven fiber model, the reduced basis expansion method and transforming the parameterized inputs into parameterized coefficients of the Nonlinear Schrodinger Equations, universal solutions with respect to inputs corresponding to different bit rates can all be obtained without the need of re-training the whole model. This model, once adopted, can have prominent advantages in both computation efficiency and physical background. Besides, this model can still be effectively trained without the needs of transmitted signals collected in advance. Tasks of on-off keying signals with bit rates ranging from 2Gbps to 50Gbps are adopted to demonstrate the fidelity of the model.
Channel Modeling for UAV-to-Ground Communications with Posture Variation and Fuselage Scattering Effect
Oct 11, 2022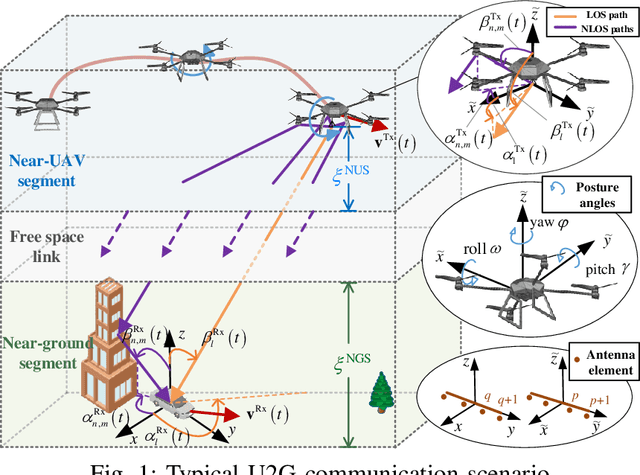
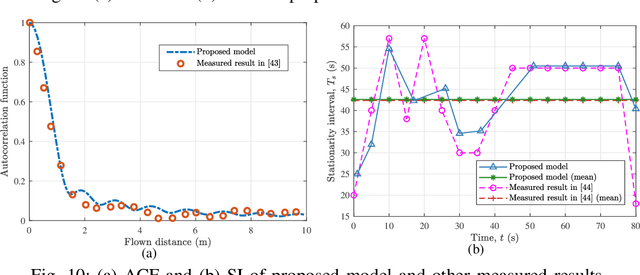
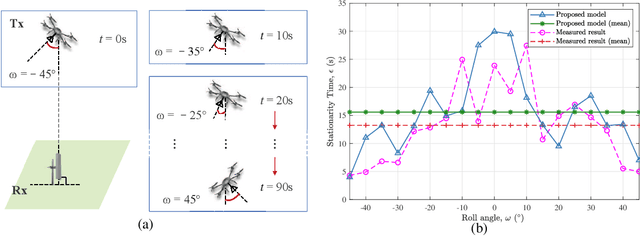
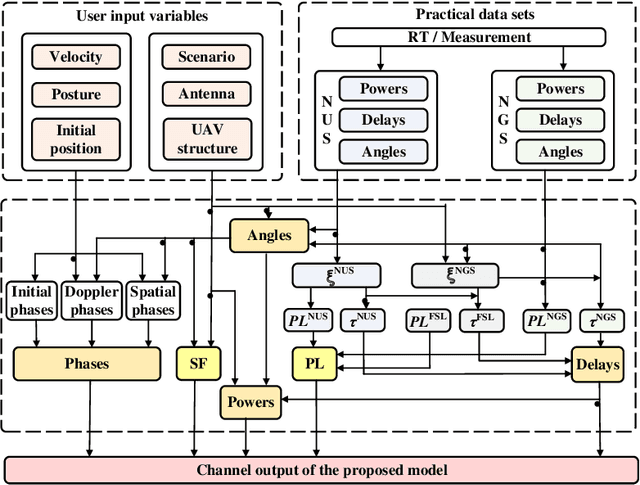
Unmanned aerial vehicle (UAV)-to-ground (U2G) channel models play a pivotal role for reliable communications between UAV and ground terminal. This paper proposes a three-dimensional (3D) non-stationary hybrid model including both large-scale and small-scale fading for U2G multiple-input-multiple-output (MIMO) channels. Distinctive channel characteristics under U2G scenarios, i.e., 3D trajectory and posture of UAV, fuselage scattering effect (FSE), and posture variation fading (PVF), are incorporated into the proposed model. The channel parameters, i.e., path loss (PL), shadow fading (SF), path delay, and path angle, are generated incorporating machine learning (ML) and ray tracing (RT) techniques to capture the structure-related characteristics. In order to guarantee the physical continuity of channel parameters such as Doppler phase and path power, the time evolution methods of inter- and intra- stationary intervals are proposed. Key statistical properties , i.e., temporal autocorrection function (ACF), power delay profile (PDP), level crossing rate (LCR), average fading duration (AFD), and stationary interval (SI) are given, and the impact of the change of fuselage and posture variation is analyzed. It is demonstrated that both posture variation and fuselage scattering have crucial effects on channel characteristics. The validity and practicability of the proposed model are verified by comparing the simulation results with the measured ones.
A Realistic 3D Non-Stationary Channel Model for UAV-to-Vehicle Communications Incorporating Fuselage Posture
Sep 19, 2022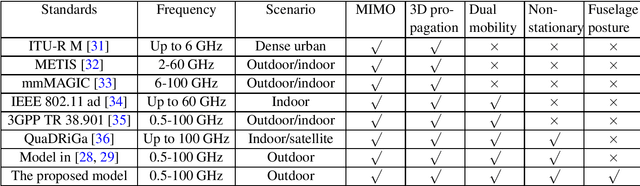
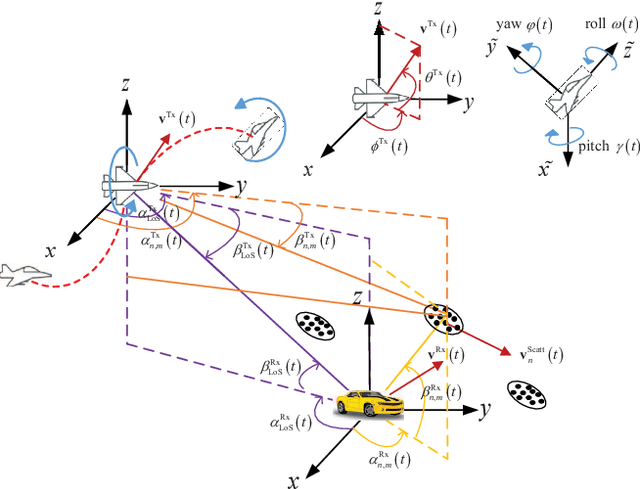
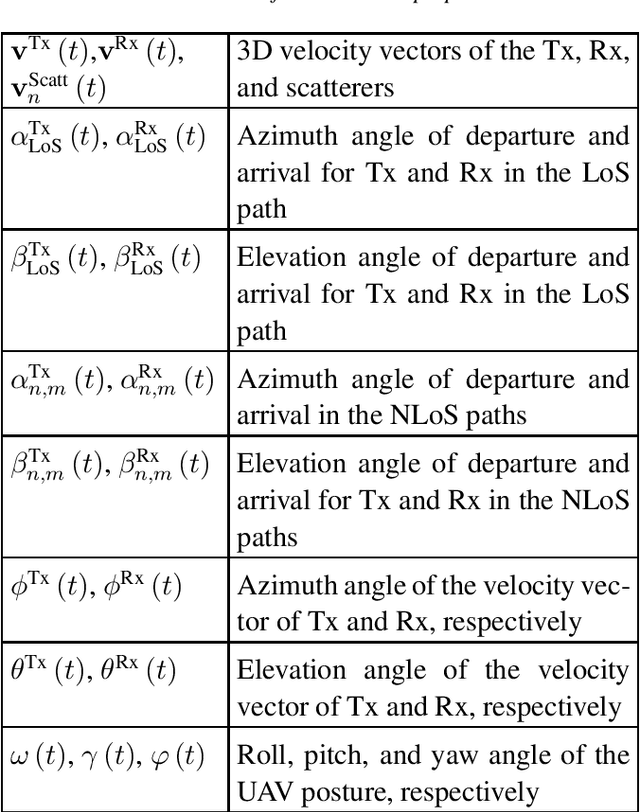
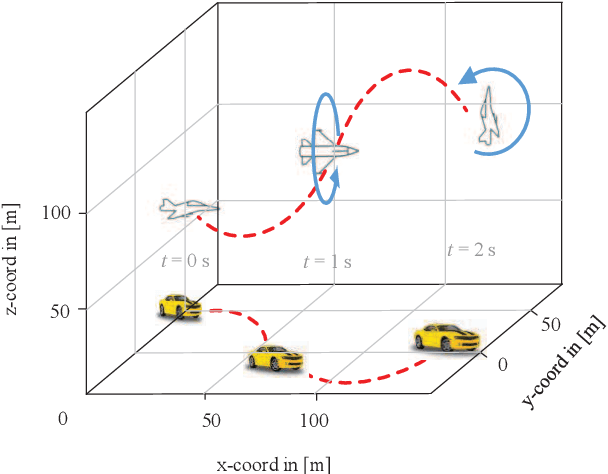
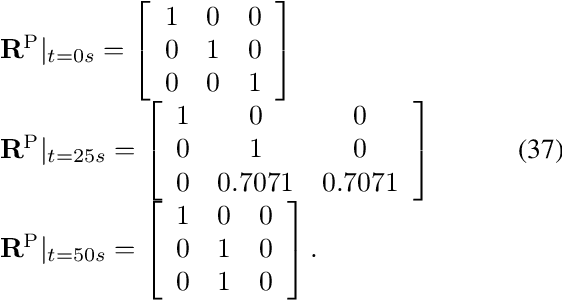
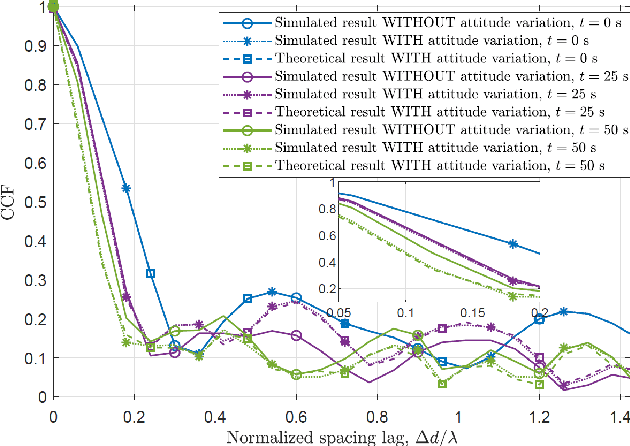
Considering the unmanned aerial vehicle (UAV) three-dimensional (3D) posture, a novel 3D non-stationary geometry-based stochastic model (GBSM) is proposed for multiple-input multiple-output (MIMO) UAV-to-vehicle (U2V) channels. It consists of a line-of-sight (LoS) and non-line-of-sight (NLoS) components. The factor of fuselage posture is considered by introducing a time-variant 3D posture matrix. Some important statistical properties, i.e. the temporal autocorrelation function (ACF) and spatial cross correlation function (CCF), are derived and investigated. Simulation results show that the fuselage posture has significant impact on the U2V channel characteristic and aggravate the non-stationarity. The agreements between analytical, simulated, and measured results verify the correctness of proposed model and derivations. Moreover, it is demonstrated that the proposed model is also compatible to the existing GBSM without considering fuselage posture.
Machine Learning-Based 3D Channel Modeling for U2V mmWave Communications
Sep 05, 2021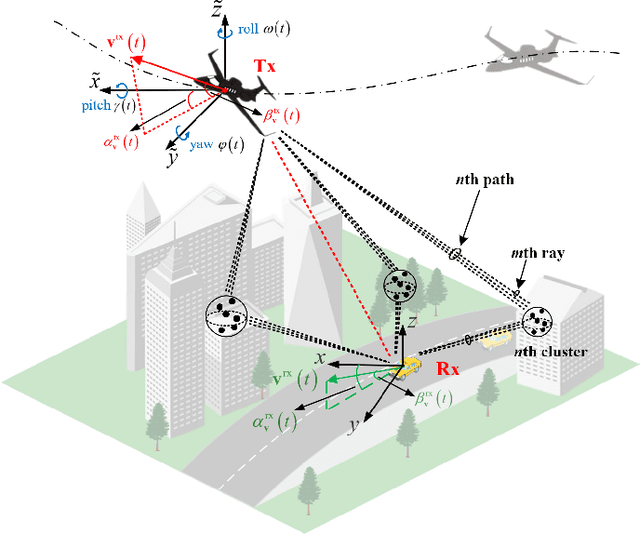
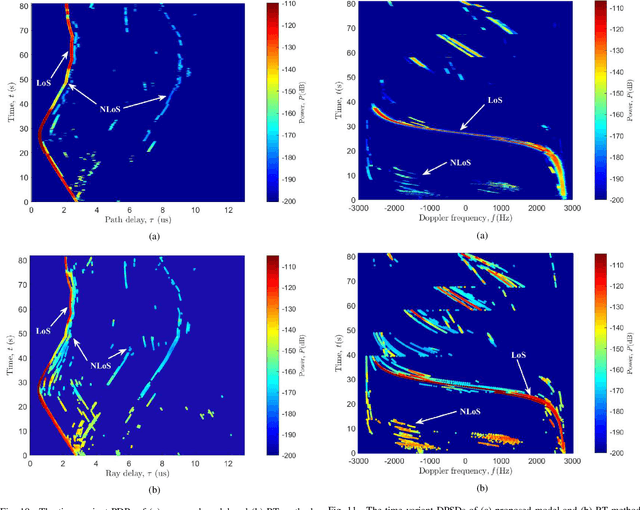
Unmanned aerial vehicle (UAV) millimeter wave (mmWave) technologies can provide flexible link and high data rate for future communication networks. By considering the new features of three-dimensional (3D) scattering space, 3D velocity, 3D antenna array, and especially 3D rotations, a machine learning (ML) integrated UAV-to-Vehicle (U2V) mmWave channel model is proposed. Meanwhile, a ML-based network for channel parameter calculation and generation is developed. The deterministic parameters are calculated based on the simplified geometry information, while the random ones are generated by the back propagation based neural network (BPNN) and generative adversarial network (GAN), where the training data set is obtained from massive ray-tracing (RT) simulations. Moreover, theoretical expressions of channel statistical properties, i.e., power delay profile (PDP), autocorrelation function (ACF), Doppler power spectrum density (DPSD), and cross-correlation function (CCF) are derived and analyzed. Finally, the U2V mmWave channel is generated under a typical urban scenario at 28 GHz. The generated PDP and DPSD show good agreement with RT-based results, which validates the effectiveness of proposed method. Moreover, the impact of 3D rotations, which has rarely been reported in previous works, can be observed in the generated CCF and ACF, which are also consistent with the theoretical and measurement results.
Map-based Channel Modeling and Generation for U2V mmWave Communication
Apr 08, 2021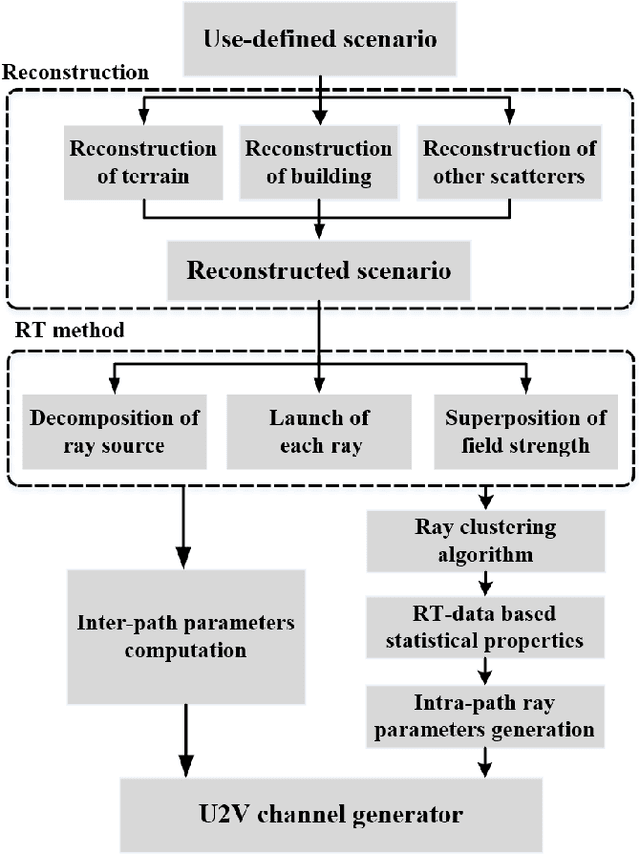
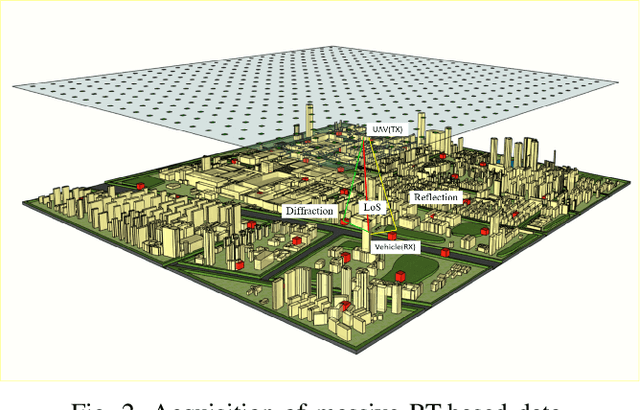
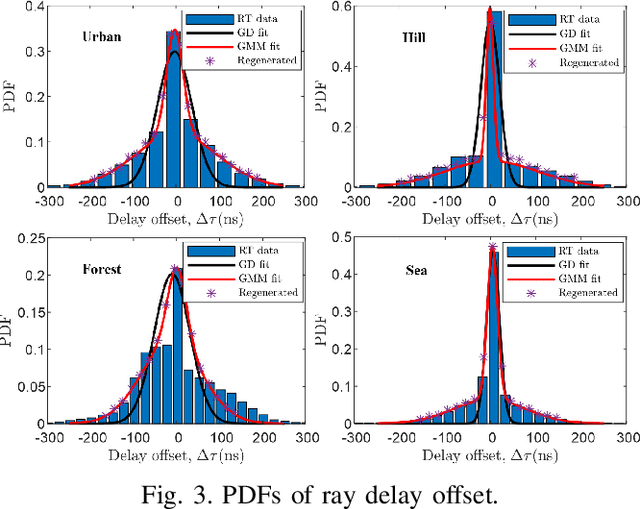
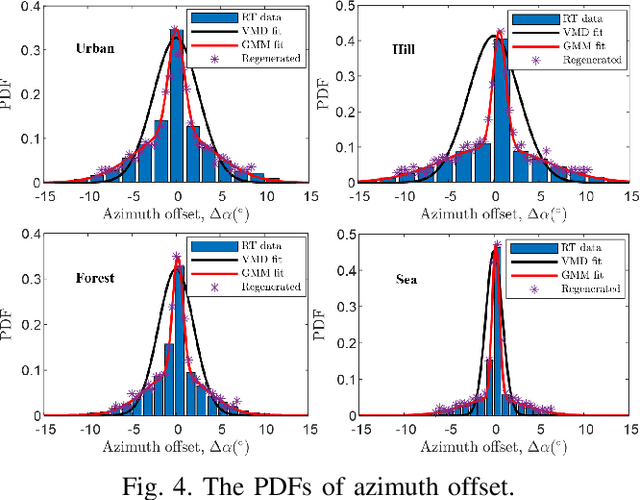
Unmanned aerial vehicle (UAV) aided millimeter wave (mmWave) technologies have a promising prospect in the future communication networks. By considering the factors of three-dimensional (3D) scattering space, 3D trajectory, and 3D antenna array, a non-stationary channel model for UAV-to-vehicle (U2V) mmWave communications is proposed. The computation and generation methods of channel parameters including interpath and intra-path are analyzed in detail. The inter-path parameters are calculated in a deterministic way, while the parameters of intra-path rays are generated in a stochastic way. The statistical properties are obtained by using a Gaussian mixture model (GMM) on the massive ray tracing (RT) data. Then, a modified method of equal areas (MMEA) is developed to generate the random intra-path variables. Meanwhile, to reduce the complexity of RT method, the 3D propagation space is reconstructed based on the user-defined digital map. The simulated and analyzed results show that the proposed model and generation method can reproduce non-stationary U2V channels in accord with U2V scenarios. The generated statistical properties are consistent with the theoretical and measured ones as well.