 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRelax: An Asynchronous Reinforcement Learning Engine for Omni-Modal Post-Training at Scale
Apr 14, 2026Reinforcement learning (RL) post-training has proven effective at unlocking reasoning, self-reflection, and tool-use capabilities in large language models. As models extend to omni-modal inputs and agentic multi-turn workflows, RL training systems face three interdependent challenges: heterogeneous data flows, operational robustness at scale, and the staleness -- throughput tradeoff. We present \textbf{Relax} (Reinforcement Engine Leveraging Agentic X-modality), an open-source RL training engine that addresses these challenges through three co-designed architectural layers. First, an \emph{omni-native architecture} builds multimodal support into the full stack -- from data preprocessing and modality-aware parallelism to inference generation -- rather than retrofitting it onto a text-centric pipeline. Second, each RL role runs as an independent, fault-isolated service that can be scaled, recovered, and upgraded without global coordination. Third, service-level decoupling enables asynchronous training via the TransferQueue data bus, where a single staleness parameter smoothly interpolates among on-policy, near-on-policy, and fully asynchronous execution. Relax achieves a 1.20$\times$ end-to-end speedup over veRL on Qwen3-4B on-policy training. Its fully async mode delivers a 1.76$\times$ speedup over colocate on Qwen3-4B and a 2.00$\times$ speedup on Qwen3-Omni-30B, while all modes converge to the same reward level. Relax supports R3 (Rollout Routing Replay)~\cite{ma2025r3} for MoE models with only 1.9\% overhead, compared to 32\% degradation in veRL under the same configuration. It further demonstrates stable omni-modal RL convergence on Qwen3-Omni across image, text, and audio, sustaining over 2{,}000 steps on video without degradation. Relax is available at https://github.com/rednote-ai/Relax.
Machine Learning-Based 3D Channel Modeling for U2V mmWave Communications
Sep 05, 2021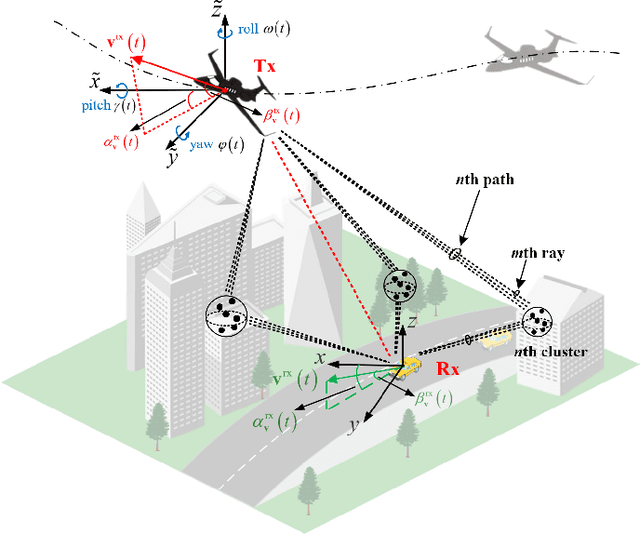
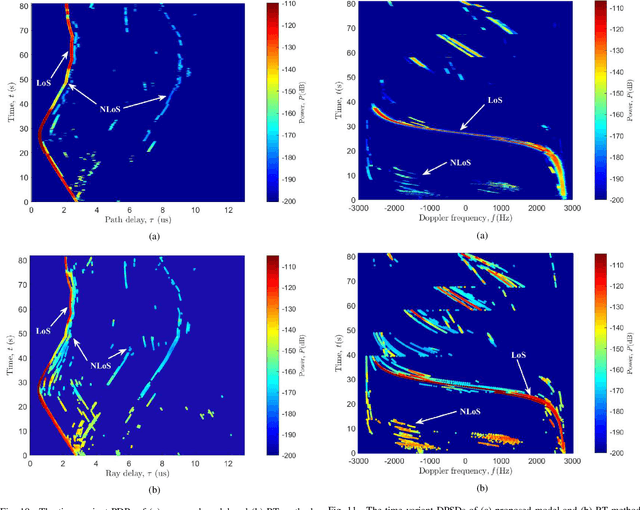
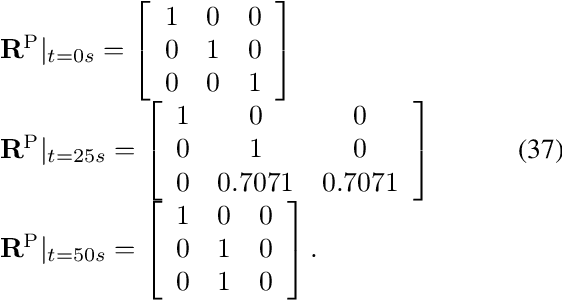
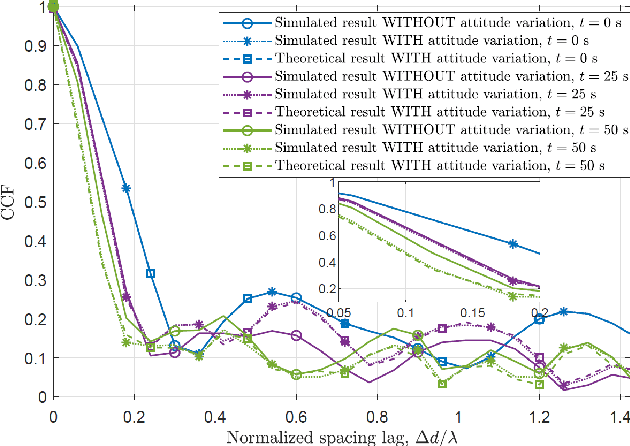
Unmanned aerial vehicle (UAV) millimeter wave (mmWave) technologies can provide flexible link and high data rate for future communication networks. By considering the new features of three-dimensional (3D) scattering space, 3D velocity, 3D antenna array, and especially 3D rotations, a machine learning (ML) integrated UAV-to-Vehicle (U2V) mmWave channel model is proposed. Meanwhile, a ML-based network for channel parameter calculation and generation is developed. The deterministic parameters are calculated based on the simplified geometry information, while the random ones are generated by the back propagation based neural network (BPNN) and generative adversarial network (GAN), where the training data set is obtained from massive ray-tracing (RT) simulations. Moreover, theoretical expressions of channel statistical properties, i.e., power delay profile (PDP), autocorrelation function (ACF), Doppler power spectrum density (DPSD), and cross-correlation function (CCF) are derived and analyzed. Finally, the U2V mmWave channel is generated under a typical urban scenario at 28 GHz. The generated PDP and DPSD show good agreement with RT-based results, which validates the effectiveness of proposed method. Moreover, the impact of 3D rotations, which has rarely been reported in previous works, can be observed in the generated CCF and ACF, which are also consistent with the theoretical and measurement results.