 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLarge Language Model Aided Multi-objective Evolutionary Algorithm: a Low-cost Adaptive Approach
Oct 03, 2024Multi-objective optimization is a common problem in practical applications, and multi-objective evolutionary algorithm (MOEA) is considered as one of the effective methods to solve these problems. However, their randomness sometimes prevents algorithms from rapidly converging to global optimization, and the design of their genetic operators often requires complicated manual tuning. To overcome this challenge, this study proposes a new framework that combines a large language model (LLM) with traditional evolutionary algorithms to enhance the algorithm's search capability and generalization performance.In our framework, we employ adaptive and hybrid mechanisms to integrate the LLM with the MOEA, thereby accelerating algorithmic convergence. Specifically, we leverage an auxiliary evaluation function and automated prompt construction within the adaptive mechanism to flexibly adjust the utilization of the LLM, generating high-quality solutions that are further refined and optimized through genetic operators.Concurrently, the hybrid mechanism aims to minimize interaction costs with the LLM as much as possible.
Principle Driven Parameterized Fiber Model based on GPT-PINN Neural Network
Aug 19, 2024In cater the need of Beyond 5G communications, large numbers of data driven artificial intelligence based fiber models has been put forward as to utilize artificial intelligence's regression ability to predict pulse evolution in fiber transmission at a much faster speed compared with the traditional split step Fourier method. In order to increase the physical interpretabiliy, principle driven fiber models have been proposed which inserts the Nonlinear Schodinger Equation into their loss functions. However, regardless of either principle driven or data driven models, they need to be re-trained the whole model under different transmission conditions. Unfortunately, this situation can be unavoidable when conducting the fiber communication optimization work. If the scale of different transmission conditions is large, then the whole model needs to be retrained large numbers of time with relatively large scale of parameters which may consume higher time costs. Computing efficiency will be dragged down as well. In order to address this problem, we propose the principle driven parameterized fiber model in this manuscript. This model breaks down the predicted NLSE solution with respect to one set of transmission condition into the linear combination of several eigen solutions which were outputted by each pre-trained principle driven fiber model via the reduced basis method. Therefore, the model can greatly alleviate the heavy burden of re-training since only the linear combination coefficients need to be found when changing the transmission condition. Not only strong physical interpretability can the model posses, but also higher computing efficiency can be obtained. Under the demonstration, the model's computational complexity is 0.0113% of split step Fourier method and 1% of the previously proposed principle driven fiber model.
Balancing the trade-off between cost and reliability for wireless sensor networks: a multi-objective optimized deployment method
Jul 19, 2022The deployment of the sensor nodes (SNs) always plays a decisive role in the system performance of wireless sensor networks (WSNs). In this work, we propose an optimal deployment method for practical heterogeneous WSNs which gives a deep insight into the trade-off between the reliability and deployment cost. Specifically, this work aims to provide the optimal deployment of SNs to maximize the coverage degree and connection degree, and meanwhile minimize the overall deployment cost. In addition, this work fully considers the heterogeneity of SNs (i.e. differentiated sensing range and deployment cost) and three-dimensional (3-D) deployment scenarios. This is a multi-objective optimization problem, non-convex, multimodal and NP-hard. To solve it, we develop a novel swarm-based multi-objective optimization algorithm, known as the competitive multi-objective marine predators algorithm (CMOMPA) whose performance is verified by comprehensive comparative experiments with ten other stateof-the-art multi-objective optimization algorithms. The computational results demonstrate that CMOMPA is superior to others in terms of convergence and accuracy and shows excellent performance on multimodal multiobjective optimization problems. Sufficient simulations are also conducted to evaluate the effectiveness of the CMOMPA based optimal SNs deployment method. The results show that the optimized deployment can balance the trade-off among deployment cost, sensing reliability and network reliability. The source code is available on https://github.com/iNet-WZU/CMOMPA.
Predicting vacant parking space availability zone-wisely: a graph based spatio-temporal prediction approach
May 03, 2022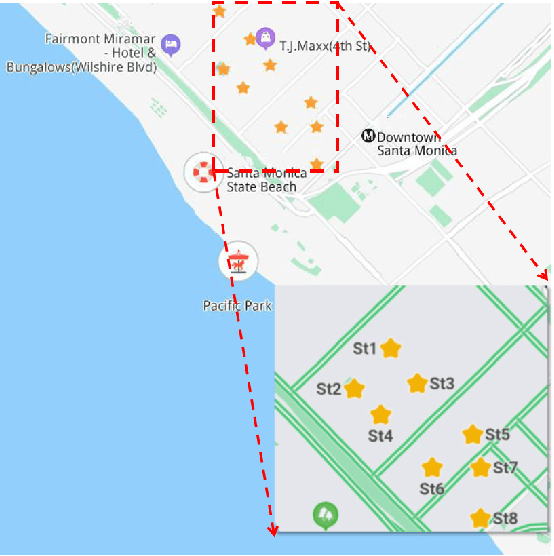
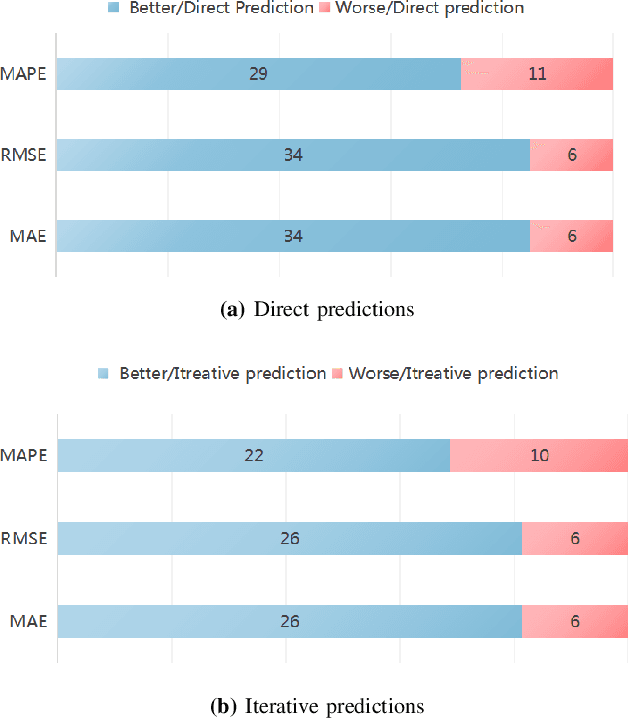
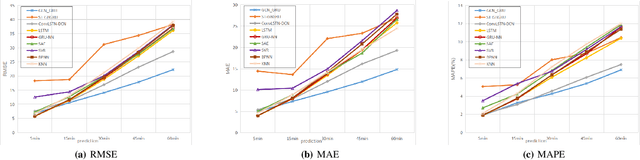
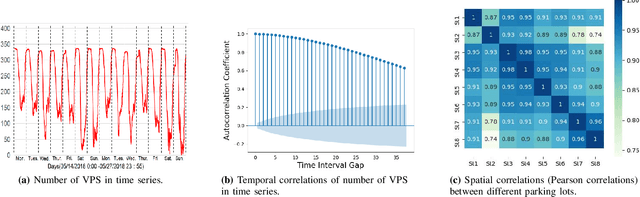
Vacant parking space (VPS) prediction is one of the key issues of intelligent parking guidance systems. Accurately predicting VPS information plays a crucial role in intelligent parking guidance systems, which can help drivers find parking space quickly, reducing unnecessary waste of time and excessive environmental pollution. Through the simple analysis of historical data, we found that there not only exists a obvious temporal correlation in each parking lot, but also a clear spatial correlation between different parking lots. In view of this, this paper proposed a graph data-based model ST-GBGRU (Spatial-Temporal Graph Based Gated Recurrent Unit), the number of VPSs can be predicted both in short-term (i.e., within 30 min) and in long-term (i.e., over 30min). On the one hand, the temporal correlation of historical VPS data is extracted by GRU, on the other hand, the spatial correlation of historical VPS data is extracted by GCN inside GRU. Two prediction methods, namely direct prediction and iterative prediction, are combined with the proposed model. Finally, the prediction model is applied to predict the number VPSs of 8 public parking lots in Santa Monica. The results show that in the short-term and long-term prediction tasks, ST-GBGRU model can achieve high accuracy and have good application prospects.