 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUncertainty Estimation for Deep Learning Image Reconstruction using a Local Lipschitz Metric
May 12, 2023The use of deep learning approaches for image reconstruction is of contemporary interest in radiology, especially for approaches that solve inverse problems associated with imaging. In deployment, these models may be exposed to input distributions that are widely shifted from training data, due in part to data biases or drifts. We propose a metric based on local Lipschitz determined from a single trained model that can be used to estimate the model uncertainty for image reconstructions. We demonstrate a monotonic relationship between the local Lipschitz value and Mean Absolute Error and show that this method can be used to provide a threshold that determines whether a given DL reconstruction approach was well suited to the task. Our uncertainty estimation method can be used to identify out-of-distribution test samples, relate information regarding epistemic uncertainties, and guide proper data augmentation. Quantifying uncertainty of learned reconstruction approaches is especially pertinent to the medical domain where reconstructed images must remain diagnostically accurate.
Learning Neural Duplex Radiance Fields for Real-Time View Synthesis
Apr 20, 2023



Neural radiance fields (NeRFs) enable novel view synthesis with unprecedented visual quality. However, to render photorealistic images, NeRFs require hundreds of deep multilayer perceptron (MLP) evaluations - for each pixel. This is prohibitively expensive and makes real-time rendering infeasible, even on powerful modern GPUs. In this paper, we propose a novel approach to distill and bake NeRFs into highly efficient mesh-based neural representations that are fully compatible with the massively parallel graphics rendering pipeline. We represent scenes as neural radiance features encoded on a two-layer duplex mesh, which effectively overcomes the inherent inaccuracies in 3D surface reconstruction by learning the aggregated radiance information from a reliable interval of ray-surface intersections. To exploit local geometric relationships of nearby pixels, we leverage screen-space convolutions instead of the MLPs used in NeRFs to achieve high-quality appearance. Finally, the performance of the whole framework is further boosted by a novel multi-view distillation optimization strategy. We demonstrate the effectiveness and superiority of our approach via extensive experiments on a range of standard datasets.
Neural Partial Differential Equations with Functional Convolution
Mar 10, 2023We present a lightweighted neural PDE representation to discover the hidden structure and predict the solution of different nonlinear PDEs. Our key idea is to leverage the prior of ``translational similarity'' of numerical PDE differential operators to drastically reduce the scale of learning model and training data. We implemented three central network components, including a neural functional convolution operator, a Picard forward iterative procedure, and an adjoint backward gradient calculator. Our novel paradigm fully leverages the multifaceted priors that stem from the sparse and smooth nature of the physical PDE solution manifold and the various mature numerical techniques such as adjoint solver, linearization, and iterative procedure to accelerate the computation. We demonstrate the efficacy of our method by robustly discovering the model and accurately predicting the solutions of various types of PDEs with small-scale networks and training sets. We highlight that all the PDE examples we showed were trained with up to 8 data samples and within 325 network parameters.
FluidLab: A Differentiable Environment for Benchmarking Complex Fluid Manipulation
Mar 04, 2023Humans manipulate various kinds of fluids in their everyday life: creating latte art, scooping floating objects from water, rolling an ice cream cone, etc. Using robots to augment or replace human labors in these daily settings remain as a challenging task due to the multifaceted complexities of fluids. Previous research in robotic fluid manipulation mostly consider fluids governed by an ideal, Newtonian model in simple task settings (e.g., pouring). However, the vast majority of real-world fluid systems manifest their complexities in terms of the fluid's complex material behaviors and multi-component interactions, both of which were well beyond the scope of the current literature. To evaluate robot learning algorithms on understanding and interacting with such complex fluid systems, a comprehensive virtual platform with versatile simulation capabilities and well-established tasks is needed. In this work, we introduce FluidLab, a simulation environment with a diverse set of manipulation tasks involving complex fluid dynamics. These tasks address interactions between solid and fluid as well as among multiple fluids. At the heart of our platform is a fully differentiable physics simulator, FluidEngine, providing GPU-accelerated simulations and gradient calculations for various material types and their couplings. We identify several challenges for fluid manipulation learning by evaluating a set of reinforcement learning and trajectory optimization methods on our platform. To address these challenges, we propose several domain-specific optimization schemes coupled with differentiable physics, which are empirically shown to be effective in tackling optimization problems featured by fluid system's non-convex and non-smooth properties. Furthermore, we demonstrate reasonable sim-to-real transfer by deploying optimized trajectories in real-world settings.
Learning Vortex Dynamics for Fluid Inference and Prediction
Feb 01, 2023We propose a novel differentiable vortex particle (DVP) method to infer and predict fluid dynamics from a single video. Lying at its core is a particle-based latent space to encapsulate the hidden, Lagrangian vortical evolution underpinning the observable, Eulerian flow phenomena. Our differentiable vortex particles are coupled with a learnable, vortex-to-velocity dynamics mapping to effectively capture the complex flow features in a physically-constrained, low-dimensional space. This representation facilitates the learning of a fluid simulator tailored to the input video that can deliver robust, long-term future predictions. The value of our method is twofold: first, our learned simulator enables the inference of hidden physics quantities (e.g., velocity field) purely from visual observation; secondly, it also supports future prediction, constructing the input video's sequel along with its future dynamics evolution. We compare our method with a range of existing methods on both synthetic and real-world videos, demonstrating improved reconstruction quality, visual plausibility, and physical integrity.
FSID: Fully Synthetic Image Denoising via Procedural Scene Generation
Dec 07, 2022



For low-level computer vision and image processing ML tasks, training on large datasets is critical for generalization. However, the standard practice of relying on real-world images primarily from the Internet comes with image quality, scalability, and privacy issues, especially in commercial contexts. To address this, we have developed a procedural synthetic data generation pipeline and dataset tailored to low-level vision tasks. Our Unreal engine-based synthetic data pipeline populates large scenes algorithmically with a combination of random 3D objects, materials, and geometric transformations. Then, we calibrate the camera noise profiles to synthesize the noisy images. From this pipeline, we generated a fully synthetic image denoising dataset (FSID) which consists of 175,000 noisy/clean image pairs. We then trained and validated a CNN-based denoising model, and demonstrated that the model trained on this synthetic data alone can achieve competitive denoising results when evaluated on real-world noisy images captured with smartphone cameras.
Policy Transfer via Enhanced Action Space
Dec 07, 2022



Though transfer learning is promising to increase the learning efficiency, the existing methods are still subject to the challenges from long-horizon tasks, especially when expert policies are sub-optimal and partially useful. Hence, a novel algorithm named EASpace (Enhanced Action Space) is proposed in this paper to transfer the knowledge of multiple sub-optimal expert policies. EASpace formulates each expert policy into multiple macro actions with different execution time period, then integrates all macro actions into the primitive action space directly. Through this formulation, the proposed EASpace could learn when to execute which expert policy and how long it lasts. An intra-macro-action learning rule is proposed by adjusting the temporal difference target of macro actions to improve the data efficiency and alleviate the non-stationarity issue in multi-agent settings. Furthermore, an additional reward proportional to the execution time of macro actions is introduced to encourage the environment exploration via macro actions, which is significant to learn a long-horizon task. Theoretical analysis is presented to show the convergence of the proposed algorithm. The efficiency of the proposed algorithm is illustrated by a grid-based game and a multi-agent pursuit problem. The proposed algorithm is also implemented to real physical systems to justify its effectiveness.
Symplectically Integrated Symbolic Regression of Hamiltonian Dynamical Systems
Sep 04, 2022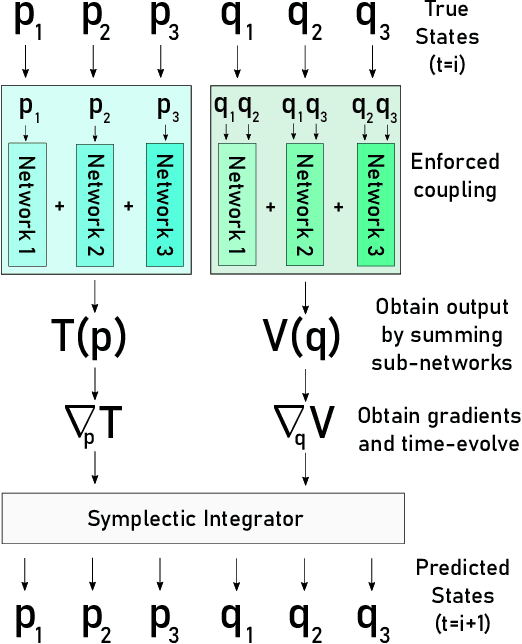
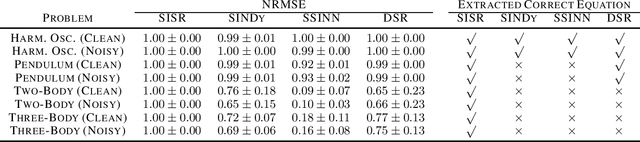
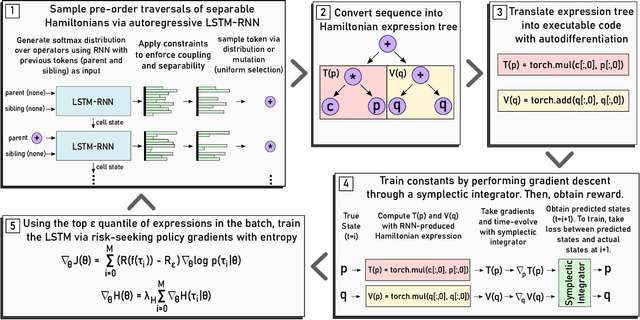
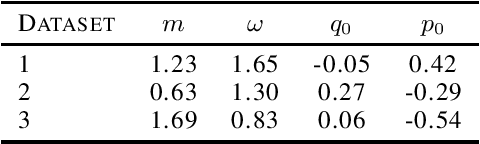
Here we present Symplectically Integrated Symbolic Regression (SISR), a novel technique for learning physical governing equations from data. SISR employs a deep symbolic regression approach, using a multi-layer LSTM-RNN with mutation to probabilistically sample Hamiltonian symbolic expressions. Using symplectic neural networks, we develop a model-agnostic approach for extracting meaningful physical priors from the data that can be imposed on-the-fly into the RNN output, limiting its search space. Hamiltonians generated by the RNN are optimized and assessed using a fourth-order symplectic integration scheme; prediction performance is used to train the LSTM-RNN to generate increasingly better functions via a risk-seeking policy gradients approach. Employing these techniques, we extract correct governing equations from oscillator, pendulum, two-body, and three-body gravitational systems with noisy and extremely small datasets.
Learning Spatio-Temporal Downsampling for Effective Video Upscaling
Mar 15, 2022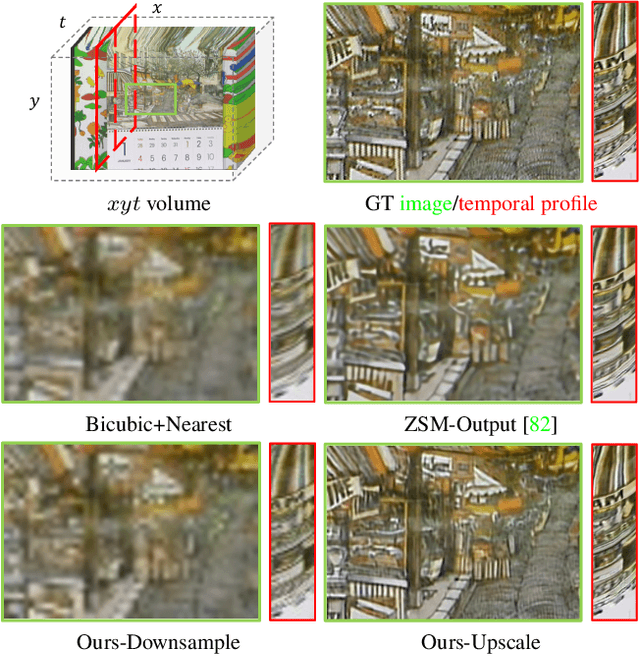
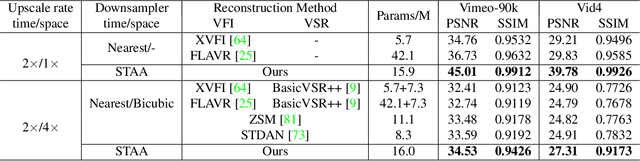
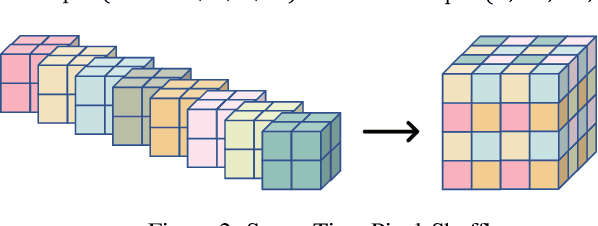
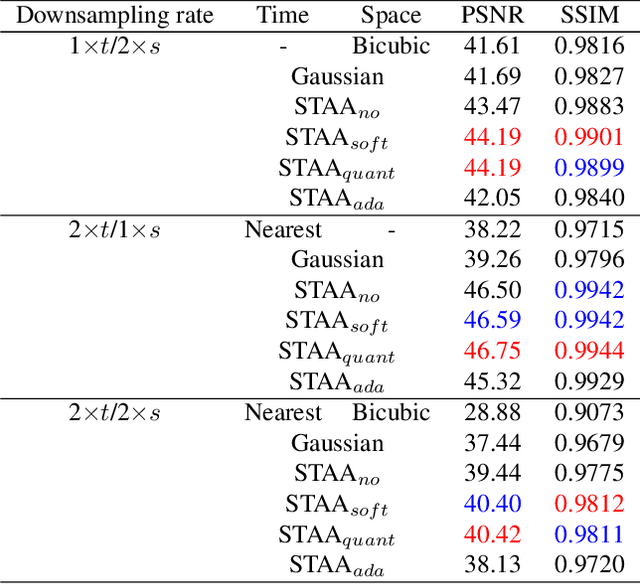
Downsampling is one of the most basic image processing operations. Improper spatio-temporal downsampling applied on videos can cause aliasing issues such as moir\'e patterns in space and the wagon-wheel effect in time. Consequently, the inverse task of upscaling a low-resolution, low frame-rate video in space and time becomes a challenging ill-posed problem due to information loss and aliasing artifacts. In this paper, we aim to solve the space-time aliasing problem by learning a spatio-temporal downsampler. Towards this goal, we propose a neural network framework that jointly learns spatio-temporal downsampling and upsampling. It enables the downsampler to retain the key patterns of the original video and maximizes the reconstruction performance of the upsampler. To make the downsamping results compatible with popular image and video storage formats, the downsampling results are encoded to uint8 with a differentiable quantization layer. To fully utilize the space-time correspondences, we propose two novel modules for explicit temporal propagation and space-time feature rearrangement. Experimental results show that our proposed method significantly boosts the space-time reconstruction quality by preserving spatial textures and motion patterns in both downsampling and upscaling. Moreover, our framework enables a variety of applications, including arbitrary video resampling, blurry frame reconstruction, and efficient video storage.
On Real-time Image Reconstruction with Neural Networks for MRI-guided Radiotherapy
Feb 10, 2022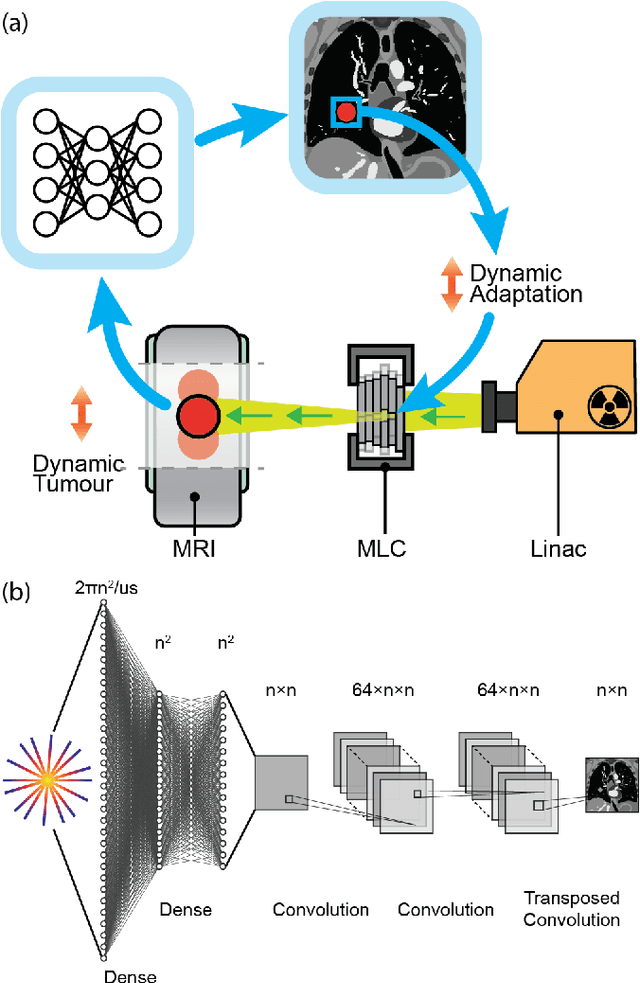
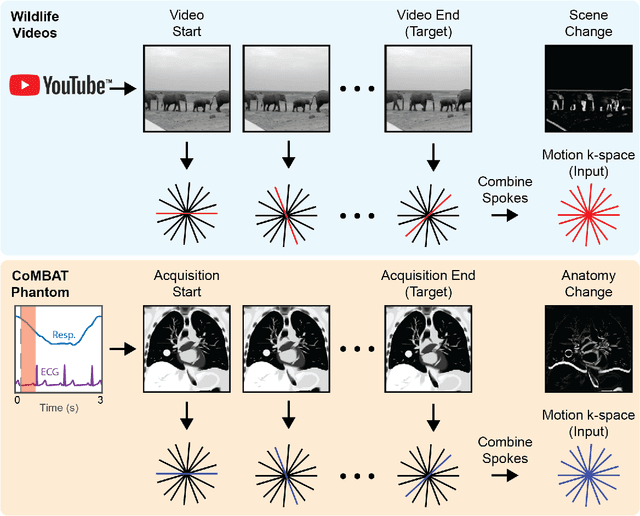
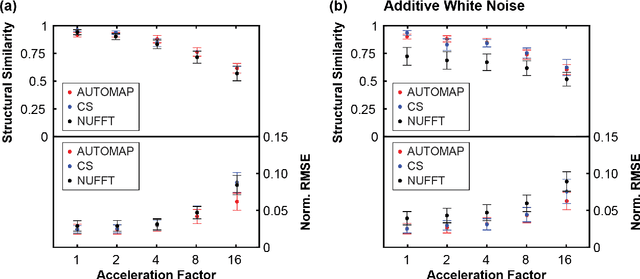
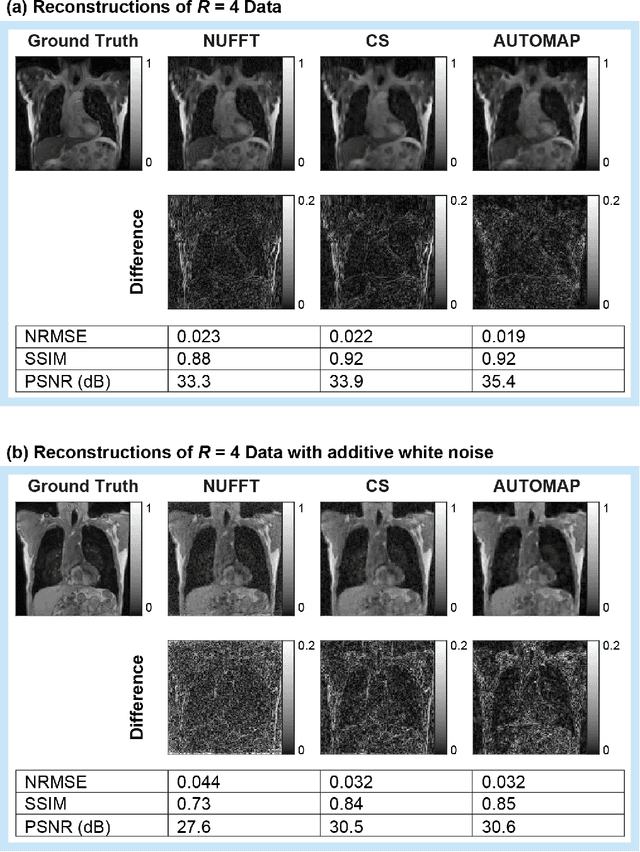
MRI-guidance techniques that dynamically adapt radiation beams to follow tumor motion in real-time will lead to more accurate cancer treatments and reduced collateral healthy tissue damage. The gold-standard for reconstruction of undersampled MR data is compressed sensing (CS) which is computationally slow and limits the rate that images can be available for real-time adaptation. Here, we demonstrate the use of automated transform by manifold approximation (AUTOMAP), a generalized framework that maps raw MR signal to the target image domain, to rapidly reconstruct images from undersampled radial k-space data. The AUTOMAP neural network was trained to reconstruct images from a golden-angle radial acquisition, a benchmark for motion-sensitive imaging, on lung cancer patient data and generic images from ImageNet. Model training was subsequently augmented with motion-encoded k-space data derived from videos in the YouTube-8M dataset to encourage motion robust reconstruction. We find that AUTOMAP-reconstructed radial k-space has equivalent accuracy to CS but with much shorter processing times after initial fine-tuning on retrospectively acquired lung cancer patient data. Validation of motion-trained models with a virtual dynamic lung tumor phantom showed that the generalized motion properties learned from YouTube lead to improved target tracking accuracy. Our work shows that AUTOMAP can achieve real-time, accurate reconstruction of radial data. These findings imply that neural-network-based reconstruction is potentially superior to existing approaches for real-time image guidance applications.