 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGaussian Process Bandit Optimization with Machine Learning Predictions and Application to Hypothesis Generation
Jan 29, 2026Many real-world optimization problems involve an expensive ground-truth oracle (e.g., human evaluation, physical experiments) and a cheap, low-fidelity prediction oracle (e.g., machine learning models, simulations). Meanwhile, abundant offline data (e.g., past experiments and predictions) are often available and can be used to pretrain powerful predictive models, as well as to provide an informative prior. We propose Prediction-Augmented Gaussian Process Upper Confidence Bound (PA-GP-UCB), a novel Bayesian optimization algorithm that leverages both oracles and offline data to achieve provable gains in sample efficiency for the ground-truth oracle queries. PA-GP-UCB employs a control-variates estimator derived from a joint Gaussian process posterior to correct prediction bias and reduce uncertainty. We prove that PA-GP-UCB preserves the standard regret rate of GP-UCB while achieving a strictly smaller leading constant that is explicitly controlled by prediction quality and offline data coverage. Empirically, PA-GP-UCB converges faster than Vanilla GP-UCB and naive prediction-augmented GP-UCB baselines on synthetic benchmarks and on a real-world hypothesis evaluation task grounded in human behavioral data, where predictions are provided by large language models. These results establish PA-GP-UCB as a general and sample-efficient framework for hypothesis generation under expensive feedback.
Data-Driven Computing Methods for Nonlinear Physics Systems with Geometric Constraints
Jun 20, 2024



In a landscape where scientific discovery is increasingly driven by data, the integration of machine learning (ML) with traditional scientific methodologies has emerged as a transformative approach. This paper introduces a novel, data-driven framework that synergizes physics-based priors with advanced ML techniques to address the computational and practical limitations inherent in first-principle-based methods and brute-force machine learning methods. Our framework showcases four algorithms, each embedding a specific physics-based prior tailored to a particular class of nonlinear systems, including separable and nonseparable Hamiltonian systems, hyperbolic partial differential equations, and incompressible fluid dynamics. The intrinsic incorporation of physical laws preserves the system's intrinsic symmetries and conservation laws, ensuring solutions are physically plausible and computationally efficient. The integration of these priors also enhances the expressive power of neural networks, enabling them to capture complex patterns typical in physical phenomena that conventional methods often miss. As a result, our models outperform existing data-driven techniques in terms of prediction accuracy, robustness, and predictive capability, particularly in recognizing features absent from the training set, despite relying on small datasets, short training periods, and small sample sizes.
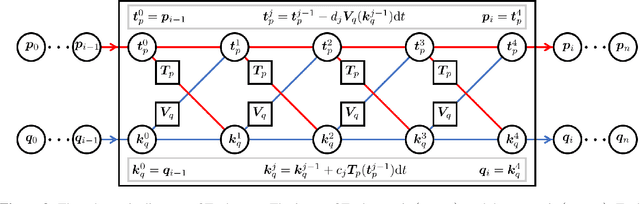
Nonseparable Symplectic Neural Networks
Oct 23, 2020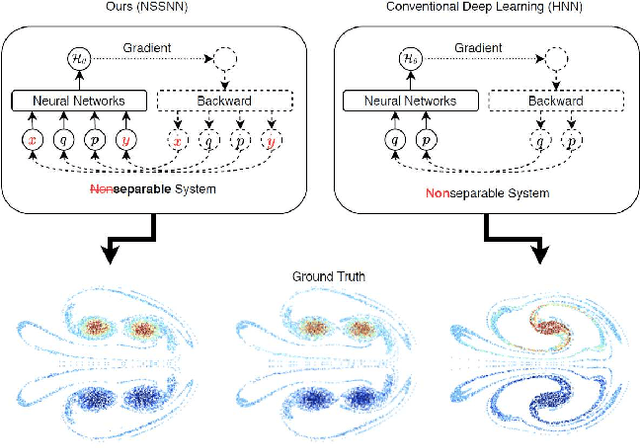
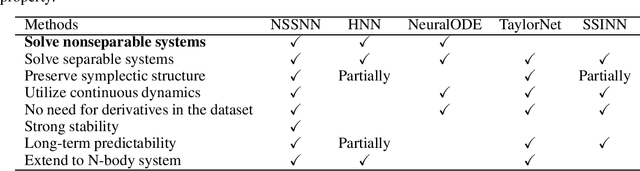
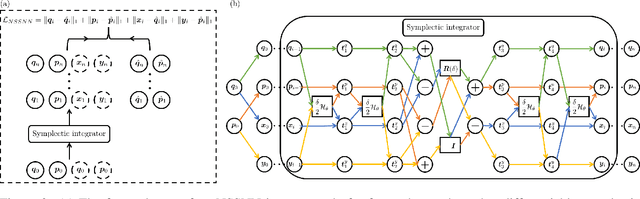
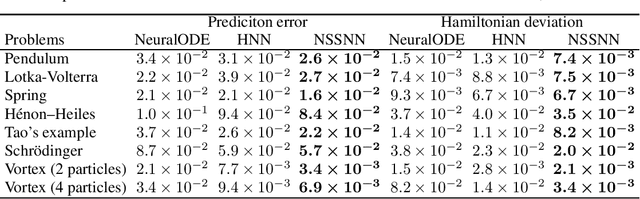
Predicting the behaviors of Hamiltonian systems has been drawing increasing attention in scientific machine learning. However, the vast majority of the literature was focused on predicting separable Hamiltonian systems with their kinematic and potential energy terms being explicitly decoupled, while building data-driven paradigms to predict nonseparable Hamiltonian systems that are ubiquitous in fluid dynamics and quantum mechanics were rarely explored. The main computational challenge lies in the effective embedding of symplectic priors to describe the inherently coupled evolution of position and momentum, which typically exhibits intricate dynamics with many degrees of freedom. To solve the problem, we propose a novel neural network architecture, Nonseparable Symplectic Neural Networks (NSSNNs), to uncover and embed the symplectic structure of a nonseparable Hamiltonian system from limited observation data. The enabling mechanics of our approach is an augmented symplectic time integrator to decouple the position and momentum energy terms and facilitate their evolution. We demonstrated the efficacy and versatility of our method by predicting a wide range of Hamiltonian systems, both separable and nonseparable, including vortical flow and quantum system. We showed the unique computational merits of our approach to yield long-term, accurate, and robust predictions for large-scale Hamiltonian systems by rigorously enforcing symplectomorphism.
Soft Multicopter Control using Neural Dynamics Identification
Sep 02, 2020
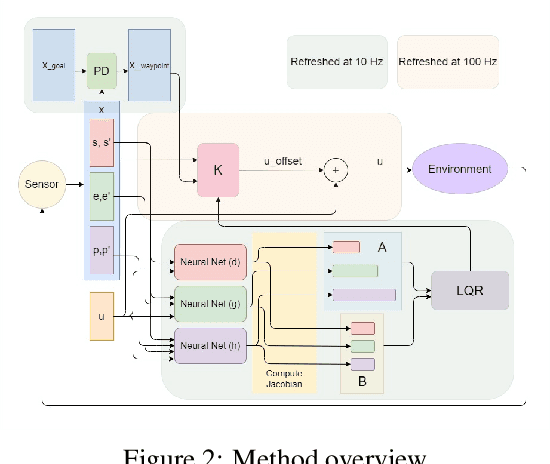
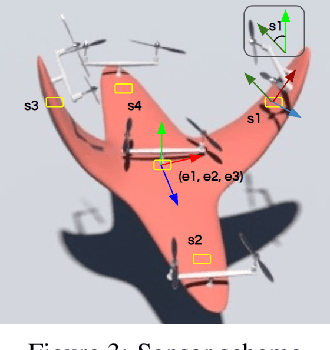
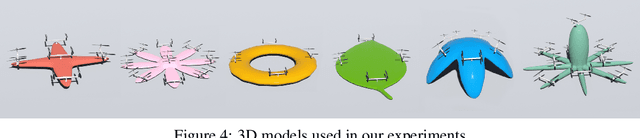
Dynamic control of a soft-body robot to deliver complex behaviors with low-dimensional actuation inputs is challenging. In this paper, we present a computational approach to automatically generate versatile, underactuated control policies that drives soft-bodied machines with complicated structures and nonlinear dynamics. Our target application is focused on the autonomous control of a soft multicopter, featured by its elastic material components, non-conventional shapes, and asymmetric rotor layouts, to precisely deliver compliant deformation and agile locomotion. The central piece of our approach lies in a lightweight neural surrogate model to identify and predict the temporal evolution of a set of geometric variables characterizing an elastic soft body. This physics-based learning model is further integrated into a Linear Quadratic Regulator (LQR) control loop enhanced by a novel online fixed-point relinearization scheme to accommodate the dynamic body balance, allowing an aggressive reduction of the computational overhead caused by the conventional full-scale sensing-simulation-control workflow. We demonstrate the efficacy of our approach by generating controllers for a broad spectrum of customized soft multicopter designs and testing them in a high-fidelity physics simulation environment. The control algorithm enables the multicopters to perform a variety of tasks, including hovering, trajectory tracking, cruising and active deforming.
RoeNets: Predicting Discontinuity of Hyperbolic Systems from Continuous Data
Jun 07, 2020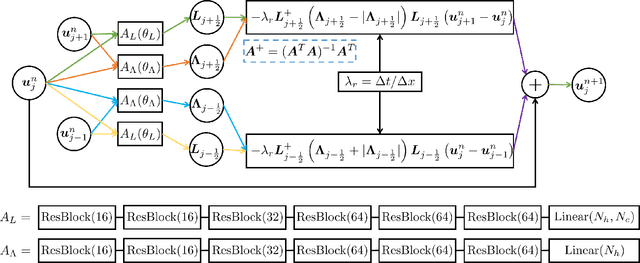
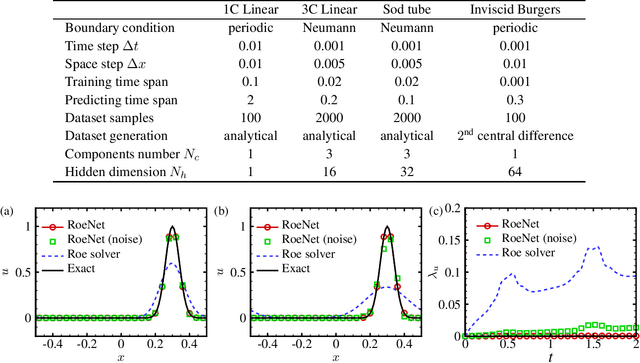
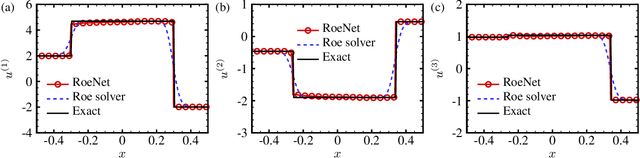
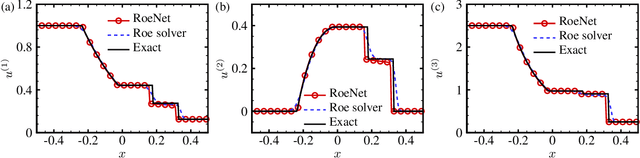
We introduce Roe Neural Networks (RoeNets) that can predict the discontinuity of the hyperbolic conservation laws (HCLs) based on short-term discontinuous and even continuous training data. Our methodology is inspired by Roe approximate Riemann solver (P. L. Roe, J. Comput. Phys., vol. 43, 1981, pp. 357--372), which is one of the most fundamental HCLs numerical solvers. In order to accurately solve the HCLs, Roe argues the need to construct a Roe matrix that fulfills "Property U", including diagonalizable with real eigenvalues, consistent with the exact Jacobian, and preserving conserved quantities. However, the construction of such matrix cannot be achieved by any general numerical method. Our model made a breakthrough improvement in solving the HCLs by applying Roe solver under a neural network perspective. To enhance the expressiveness of our model, we incorporate pseudoinverses into a novel context to enable a hidden dimension so that we are flexible with the number of parameters. The ability of our model to predict long-term discontinuity from a short window of continuous training data is in general considered impossible using traditional machine learning approaches. We demonstrate that our model can generate highly accurate predictions of evolution of convection without dissipation and the discontinuity of hyperbolic systems from smooth training data.
Neural Vortex Method: from Finite Lagrangian Particles to Infinite Dimensional Eulerian Dynamics
Jun 07, 2020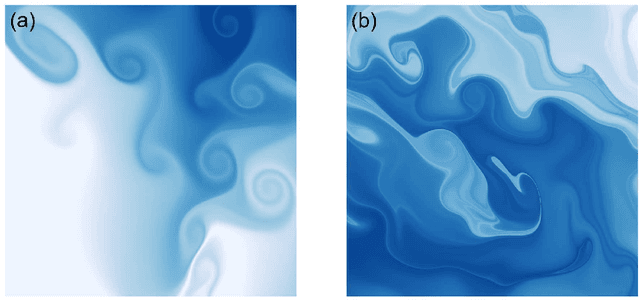
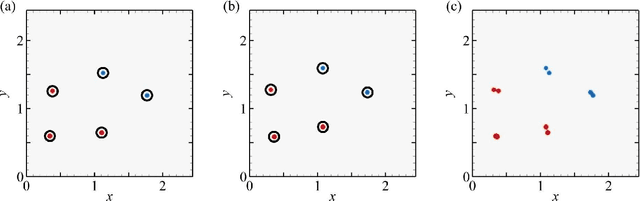

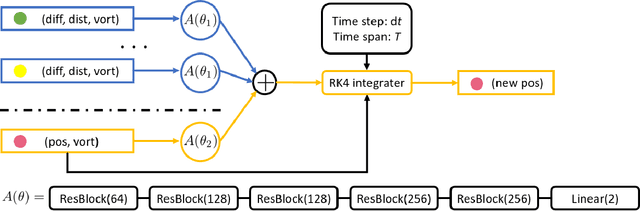
In the field of fluid numerical analysis, there has been a long-standing problem: lacking of a rigorous mathematical tool to map from a continuous flow field to discrete vortex particles, hurdling the Lagrangian particles from inheriting the high resolution of a large-scale Eulerian solver. To tackle this challenge, we propose a novel learning-based framework, the Neural Vortex Method (NVM), which builds a neural-network description of the Lagrangian vortex structures and their interaction dynamics to reconstruct the high-resolution Eulerian flow field in a physically-precise manner. The key components of our infrastructure consist of two networks: a vortex representation network to identify the Lagrangian vortices from a grid-based velocity field and a vortex interaction network to learn the underlying governing dynamics of these finite structures. By embedding these two networks with a vorticity-to-velocity Poisson solver and training its parameters using the high-fidelity data obtained from high-resolution direct numerical simulation, we can predict the accurate fluid dynamics on a precision level that was infeasible for all the previous conventional vortex methods (CVMs). To the best of our knowledge, our method is the first approach that can utilize motions of finite particles to learn infinite dimensional dynamic systems. We demonstrate the efficacy of our method in generating highly accurate prediction results, with low computational cost, of the leapfrogging vortex rings system, the turbulence system, and the systems governed by Euler equations with different external forces.
Symplectic Neural Networks in Taylor Series Form for Hamiltonian Systems
May 13, 2020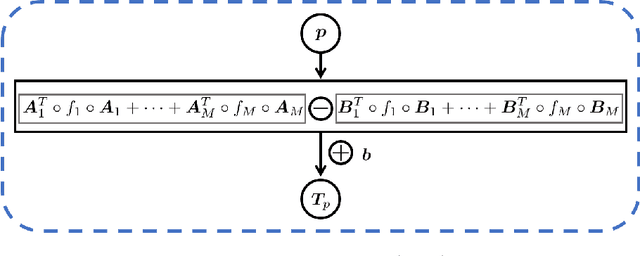

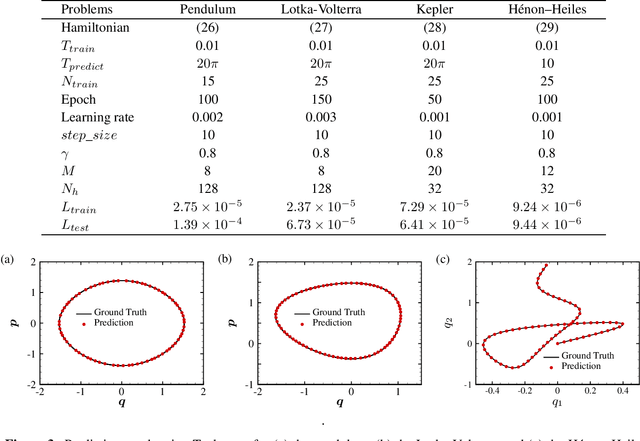
We propose an effective and light-weighted learning algorithm, Symplectic Taylor Neural Networks (Taylor-nets), to conduct continuous, long-term predictions of a complex Hamiltonian dynamic system based on sparse, short-term observations. At the heart of our algorithm is a novel neural network architecture consisting of two sub-networks. Both are embedded with terms in the form of Taylor series expansion that are designed with a symmetric structure. The key mechanism underpinning our infrastructure is the strong expressiveness and special symmetric property of the Taylor series expansion, which can inherently accommodate the numerical fitting process of the spatial derivatives of the Hamiltonian as well as preserve its symplectic structure. We further incorporate a fourth-order symplectic integrator in conjunction with neural ODEs' framework into our Taylor-net architecture to learn the continuous time evolution of the target systems while preserving their symplectic structures simultaneously. We demonstrated the efficacy of our Tayler-net in predicting a broad spectrum of Hamiltonian dynamic systems, including the pendulum, the Lotka-Volterra, the Kepler, and the H\`enon-Heiles systems. Compared with previous methods, our model exhibits its unique computational merits by using extremely small training data with short training period (6000 times shorter than the predicting period), small sample sizes (5 times smaller compared with the state-of-the-art methods), and no intermediary data to train the networks, while outperforming others to a great extent regarding the prediction accuracy, the convergence rate, and the robustness.