 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Estimating Transferability using Hard Subsets
Jan 17, 2023



As transfer learning techniques are increasingly used to transfer knowledge from the source model to the target task, it becomes important to quantify which source models are suitable for a given target task without performing computationally expensive fine tuning. In this work, we propose HASTE (HArd Subset TransfErability), a new strategy to estimate the transferability of a source model to a particular target task using only a harder subset of target data. By leveraging the internal and output representations of model, we introduce two techniques, one class agnostic and another class specific, to identify harder subsets and show that HASTE can be used with any existing transferability metric to improve their reliability. We further analyze the relation between HASTE and the optimal average log likelihood as well as negative conditional entropy and empirically validate our theoretical bounds. Our experimental results across multiple source model architectures, target datasets, and transfer learning tasks show that HASTE modified metrics are consistently better or on par with the state of the art transferability metrics.
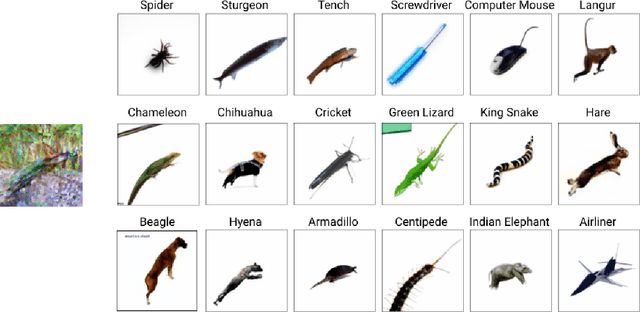
UMFuse: Unified Multi View Fusion for Human Editing applications
Dec 01, 2022The vision community has explored numerous pose guided human editing methods due to their extensive practical applications. Most of these methods still use an image-to-image formulation in which a single image is given as input to produce an edited image as output. However, the problem is ill-defined in cases when the target pose is significantly different from the input pose. Existing methods then resort to in-painting or style transfer to handle occlusions and preserve content. In this paper, we explore the utilization of multiple views to minimize the issue of missing information and generate an accurate representation of the underlying human model. To fuse the knowledge from multiple viewpoints, we design a selector network that takes the pose keypoints and texture from images and generates an interpretable per-pixel selection map. After that, the encodings from a separate network (trained on a single image human reposing task) are merged in the latent space. This enables us to generate accurate, precise, and visually coherent images for different editing tasks. We show the application of our network on 2 newly proposed tasks - Multi-view human reposing, and Mix-and-match human image generation. Additionally, we study the limitations of single-view editing and scenarios in which multi-view provides a much better alternative.
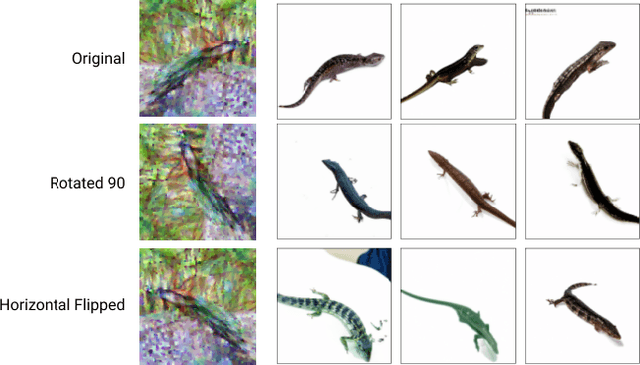
VGFlow: Visibility guided Flow Network for Human Reposing
Nov 13, 2022The task of human reposing involves generating a realistic image of a person standing in an arbitrary conceivable pose. There are multiple difficulties in generating perceptually accurate images, and existing methods suffer from limitations in preserving texture, maintaining pattern coherence, respecting cloth boundaries, handling occlusions, manipulating skin generation, etc. These difficulties are further exacerbated by the fact that the possible space of pose orientation for humans is large and variable, the nature of clothing items is highly non-rigid, and the diversity in body shape differs largely among the population. To alleviate these difficulties and synthesize perceptually accurate images, we propose VGFlow. Our model uses a visibility-guided flow module to disentangle the flow into visible and invisible parts of the target for simultaneous texture preservation and style manipulation. Furthermore, to tackle distinct body shapes and avoid network artifacts, we also incorporate a self-supervised patch-wise "realness" loss to improve the output. VGFlow achieves state-of-the-art results as observed qualitatively and quantitatively on different image quality metrics (SSIM, LPIPS, FID).
One-Shot Doc Snippet Detection: Powering Search in Document Beyond Text
Sep 12, 2022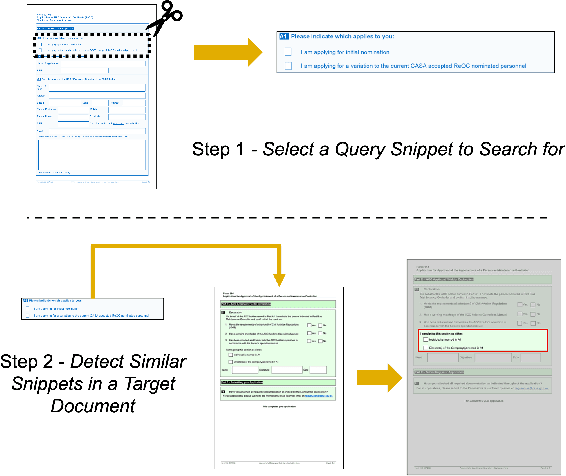

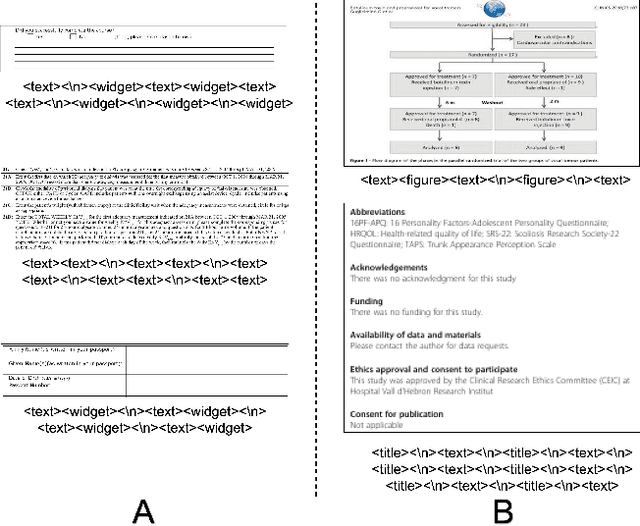
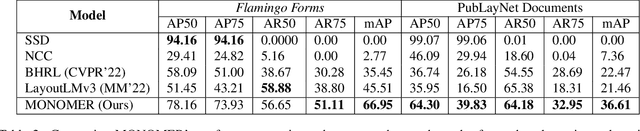
Active consumption of digital documents has yielded scope for research in various applications, including search. Traditionally, searching within a document has been cast as a text matching problem ignoring the rich layout and visual cues commonly present in structured documents, forms, etc. To that end, we ask a mostly unexplored question: "Can we search for other similar snippets present in a target document page given a single query instance of a document snippet?". We propose MONOMER to solve this as a one-shot snippet detection task. MONOMER fuses context from visual, textual, and spatial modalities of snippets and documents to find query snippet in target documents. We conduct extensive ablations and experiments showing MONOMER outperforms several baselines from one-shot object detection (BHRL), template matching, and document understanding (LayoutLMv3). Due to the scarcity of relevant data for the task at hand, we train MONOMER on programmatically generated data having many visually similar query snippets and target document pairs from two datasets - Flamingo Forms and PubLayNet. We also do a human study to validate the generated data.
Persuasion Strategies in Advertisements: Dataset, Modeling, and Baselines
Aug 20, 2022
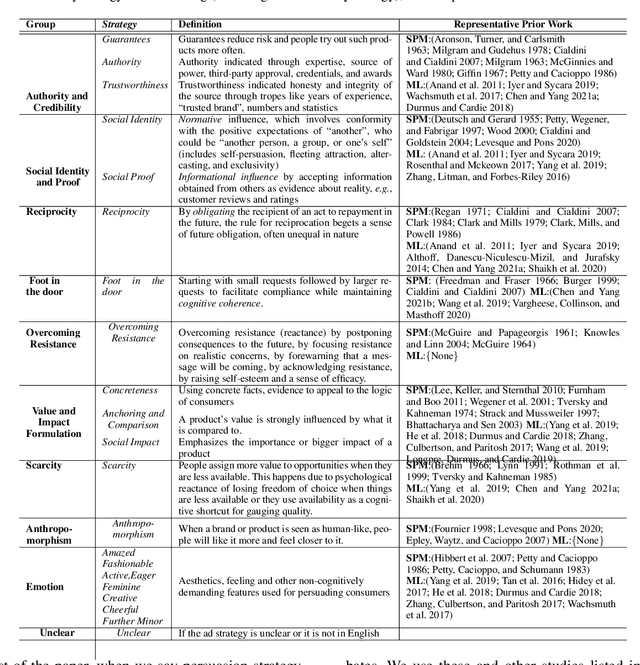
Modeling what makes an advertisement persuasive, i.e., eliciting the desired response from consumer, is critical to the study of propaganda, social psychology, and marketing. Despite its importance, computational modeling of persuasion in computer vision is still in its infancy, primarily due to the lack of benchmark datasets that can provide persuasion-strategy labels associated with ads. Motivated by persuasion literature in social psychology and marketing, we introduce an extensive vocabulary of persuasion strategies and build the first ad image corpus annotated with persuasion strategies. We then formulate the task of persuasion strategy prediction with multi-modal learning, where we design a multi-task attention fusion model that can leverage other ad-understanding tasks to predict persuasion strategies. Further, we conduct a real-world case study on 1600 advertising campaigns of 30 Fortune-500 companies where we use our model's predictions to analyze which strategies work with different demographics (age and gender). The dataset also provides image segmentation masks, which labels persuasion strategies in the corresponding ad images on the test split. We publicly release our code and dataset https://midas-research.github.io/persuasion-advertisements/.
LM-CORE: Language Models with Contextually Relevant External Knowledge
Aug 12, 2022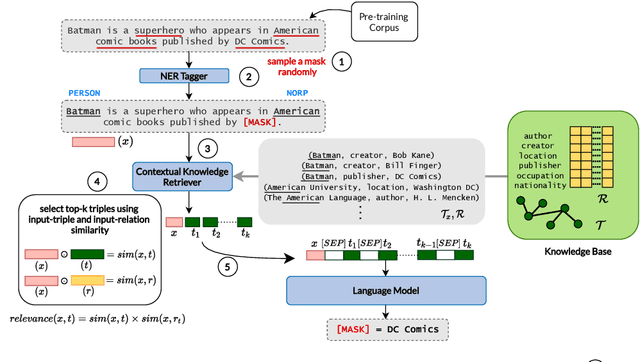
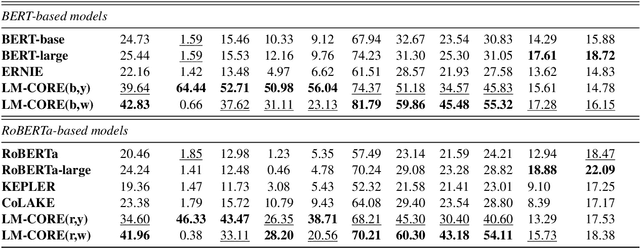
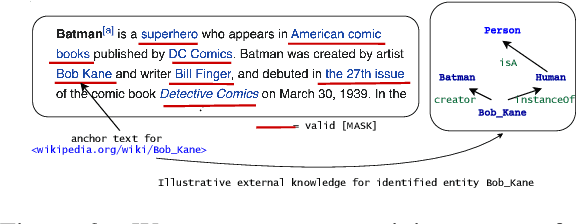
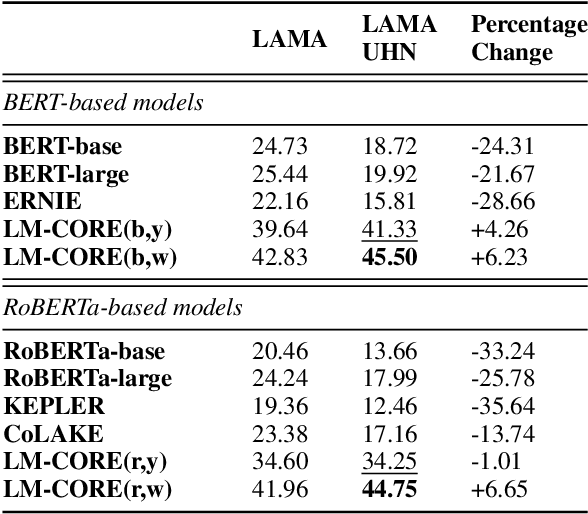
Large transformer-based pre-trained language models have achieved impressive performance on a variety of knowledge-intensive tasks and can capture factual knowledge in their parameters. We argue that storing large amounts of knowledge in the model parameters is sub-optimal given the ever-growing amounts of knowledge and resource requirements. We posit that a more efficient alternative is to provide explicit access to contextually relevant structured knowledge to the model and train it to use that knowledge. We present LM-CORE -- a general framework to achieve this -- that allows \textit{decoupling} of the language model training from the external knowledge source and allows the latter to be updated without affecting the already trained model. Experimental results show that LM-CORE, having access to external knowledge, achieves significant and robust outperformance over state-of-the-art knowledge-enhanced language models on knowledge probing tasks; can effectively handle knowledge updates; and performs well on two downstream tasks. We also present a thorough error analysis highlighting the successes and failures of LM-CORE.
Differentiable Agent-based Epidemiology
Jul 20, 2022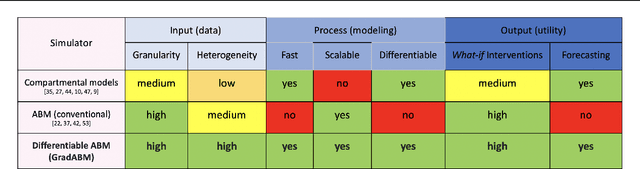
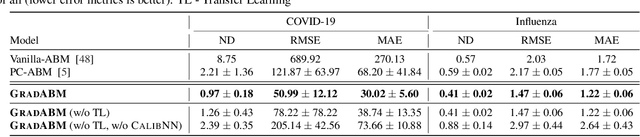
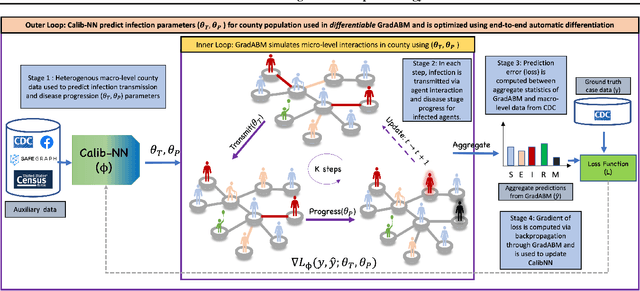

Mechanistic simulators are an indispensable tool for epidemiology to explore the behavior of complex, dynamic infections under varying conditions and navigate uncertain environments. ODE-based models are the dominant paradigm that enable fast simulations and are tractable to gradient-based optimization, but make simplifying assumptions about population homogeneity. Agent-based models (ABMs) are an increasingly popular alternative paradigm that can represent the heterogeneity of contact interactions with granular detail and agency of individual behavior. However, conventional ABM frameworks are not differentiable and present challenges in scalability; due to which it is non-trivial to connect them to auxiliary data sources easily. In this paper we introduce GradABM which is a new scalable, fast and differentiable design for ABMs. GradABM runs simulations in few seconds on commodity hardware and enables fast forward and differentiable inverse simulations. This makes it amenable to be merged with deep neural networks and seamlessly integrate heterogeneous data sources to help with calibration, forecasting and policy evaluation. We demonstrate the efficacy of GradABM via extensive experiments with real COVID-19 and influenza datasets. We are optimistic this work will bring ABM and AI communities closer together.
CoSe-Co: Text Conditioned Generative CommonSense Contextualizer
Jun 17, 2022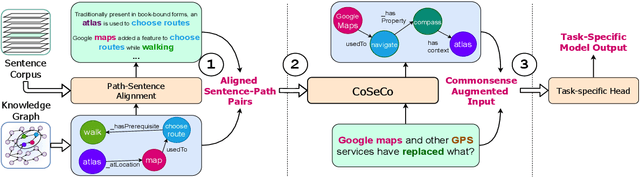
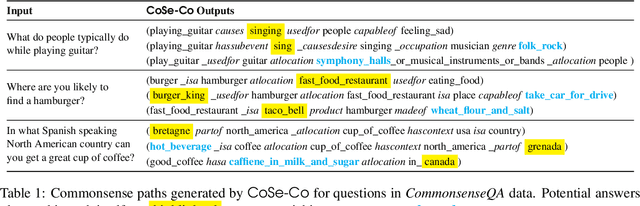
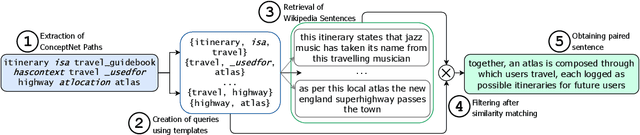
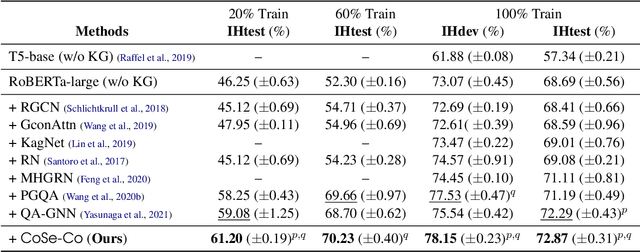
Pre-trained Language Models (PTLMs) have been shown to perform well on natural language tasks. Many prior works have leveraged structured commonsense present in the form of entities linked through labeled relations in Knowledge Graphs (KGs) to assist PTLMs. Retrieval approaches use KG as a separate static module which limits coverage since KGs contain finite knowledge. Generative methods train PTLMs on KG triples to improve the scale at which knowledge can be obtained. However, training on symbolic KG entities limits their applicability in tasks involving natural language text where they ignore overall context. To mitigate this, we propose a CommonSense Contextualizer (CoSe-Co) conditioned on sentences as input to make it generically usable in tasks for generating knowledge relevant to the overall context of input text. To train CoSe-Co, we propose a novel dataset comprising of sentence and commonsense knowledge pairs. The knowledge inferred by CoSe-Co is diverse and contain novel entities not present in the underlying KG. We augment generated knowledge in Multi-Choice QA and Open-ended CommonSense Reasoning tasks leading to improvements over current best methods on CSQA, ARC, QASC and OBQA datasets. We also demonstrate its applicability in improving performance of a baseline model for paraphrase generation task.
INDIGO: Intrinsic Multimodality for Domain Generalization
Jun 13, 2022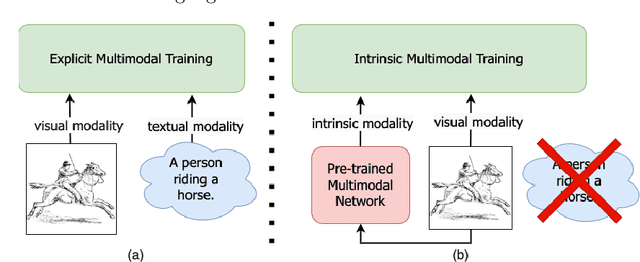
For models to generalize under unseen domains (a.k.a domain generalization), it is crucial to learn feature representations that are domain-agnostic and capture the underlying semantics that makes up an object category. Recent advances towards weakly supervised vision-language models that learn holistic representations from cheap weakly supervised noisy text annotations have shown their ability on semantic understanding by capturing object characteristics that generalize under different domains. However, when multiple source domains are involved, the cost of curating textual annotations for every image in the dataset can blow up several times, depending on their number. This makes the process tedious and infeasible, hindering us from directly using these supervised vision-language approaches to achieve the best generalization on an unseen domain. Motivated from this, we study how multimodal information from existing pre-trained multimodal networks can be leveraged in an "intrinsic" way to make systems generalize under unseen domains. To this end, we propose IntriNsic multimodality for DomaIn GeneralizatiOn (INDIGO), a simple and elegant way of leveraging the intrinsic modality present in these pre-trained multimodal networks along with the visual modality to enhance generalization to unseen domains at test-time. We experiment on several Domain Generalization settings (ClosedDG, OpenDG, and Limited sources) and show state-of-the-art generalization performance on unseen domains. Further, we provide a thorough analysis to develop a holistic understanding of INDIGO.
On Conditioning the Input Noise for Controlled Image Generation with Diffusion Models
May 08, 2022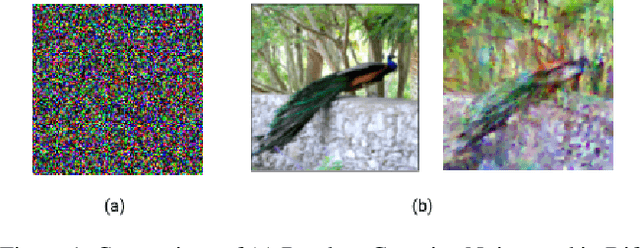
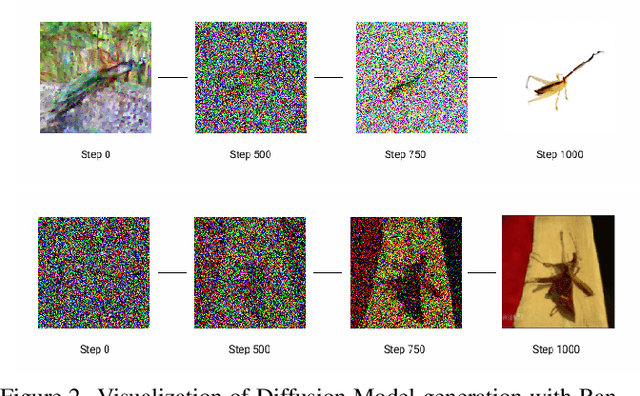
Conditional image generation has paved the way for several breakthroughs in image editing, generating stock photos and 3-D object generation. This continues to be a significant area of interest with the rise of new state-of-the-art methods that are based on diffusion models. However, diffusion models provide very little control over the generated image, which led to subsequent works exploring techniques like classifier guidance, that provides a way to trade off diversity with fidelity. In this work, we explore techniques to condition diffusion models with carefully crafted input noise artifacts. This allows generation of images conditioned on semantic attributes. This is different from existing approaches that input Gaussian noise and further introduce conditioning at the diffusion model's inference step. Our experiments over several examples and conditional settings show the potential of our approach.