 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLarge Language Model-Assisted UAV Operations and Communications: A Multifaceted Survey and Tutorial
Feb 23, 2026Uncrewed Aerial Vehicles (UAVs) are widely deployed across diverse applications due to their mobility and agility. Recent advances in Large Language Models (LLMs) offer a transformative opportunity to enhance UAV intelligence beyond conventional optimization-based and learning-based approaches. By integrating LLMs into UAV systems, advanced environmental understanding, swarm coordination, mobility optimization, and high-level task reasoning can be achieved, thereby allowing more adaptive and context-aware aerial operations. This survey systematically explores the intersection of LLMs and UAV technologies and proposes a unified framework that consolidates existing architectures, methodologies, and applications for UAVs. We first present a structured taxonomy of LLM adaptation techniques for UAVs, including pretraining, fine-tuning, Retrieval-Augmented Generation (RAG), and prompt engineering, along with key reasoning capabilities such as Chain-of-Thought (CoT) and In-Context Learning (ICL). We then examine LLM-assisted UAV communications and operations, covering navigation, mission planning, swarm control, safety, autonomy, and network management. After that, the survey further discusses Multimodal LLMs (MLLMs) for human-swarm interaction, perception-driven navigation, and collaborative control. Finally, we address ethical considerations, including bias, transparency, accountability, and Human-in-the-Loop (HITL) strategies, and outline future research directions. Overall, this work positions LLM-assisted UAVs as a foundation for intelligent and adaptive aerial systems.
Mobile Cellular-Connected UAVs: Reinforcement Learning for Sky Limits
Sep 21, 2020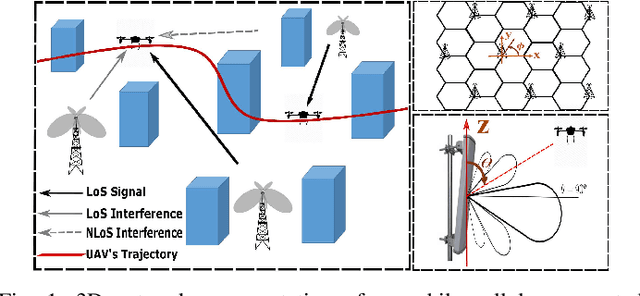
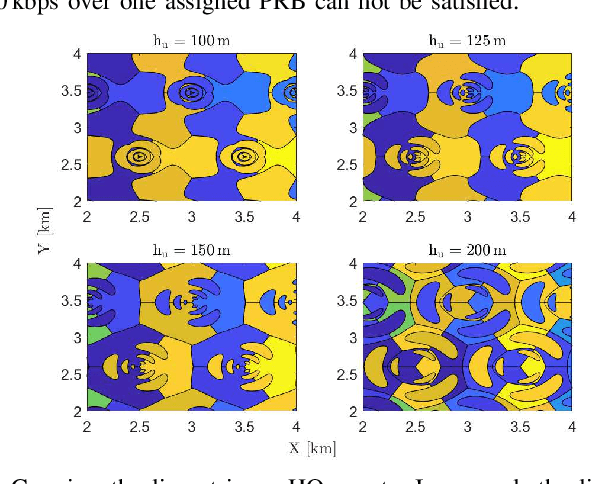
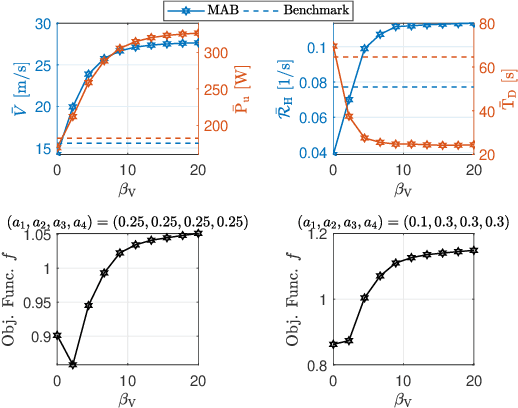
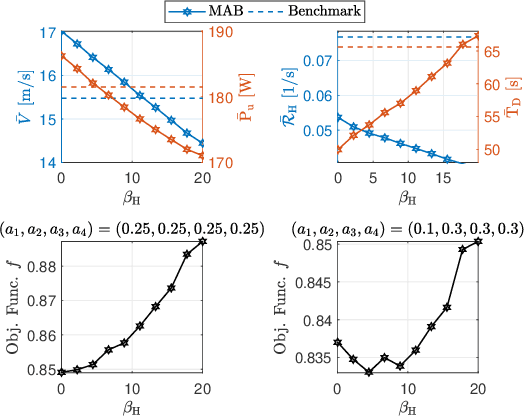
A cellular-connected unmanned aerial vehicle (UAV)faces several key challenges concerning connectivity and energy efficiency. Through a learning-based strategy, we propose a general novel multi-armed bandit (MAB) algorithm to reduce disconnectivity time, handover rate, and energy consumption of UAV by taking into account its time of task completion. By formulating the problem as a function of UAV's velocity, we show how each of these performance indicators (PIs) is improved by adopting a proper range of corresponding learning parameter, e.g. 50% reduction in HO rate as compared to a blind strategy. However, results reveal that the optimal combination of the learning parameters depends critically on any specific application and the weights of PIs on the final objective function.
Learning in the Sky: An Efficient 3D Placement of UAVs
Mar 02, 2020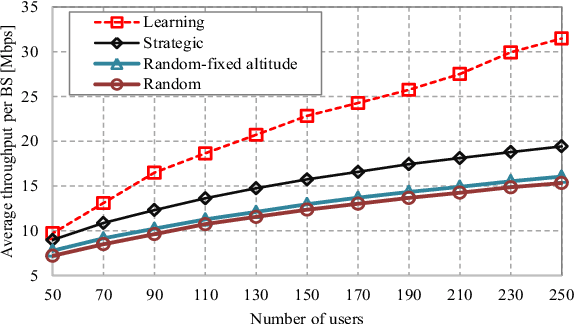
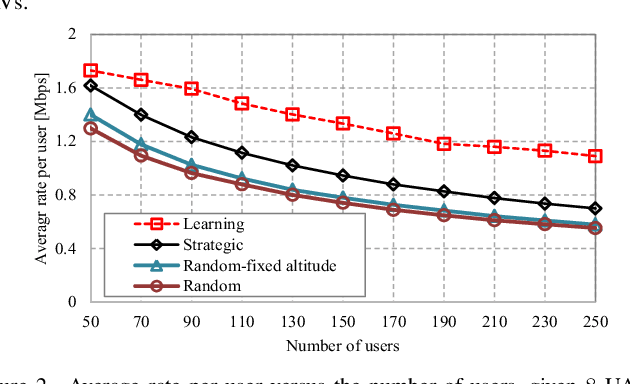
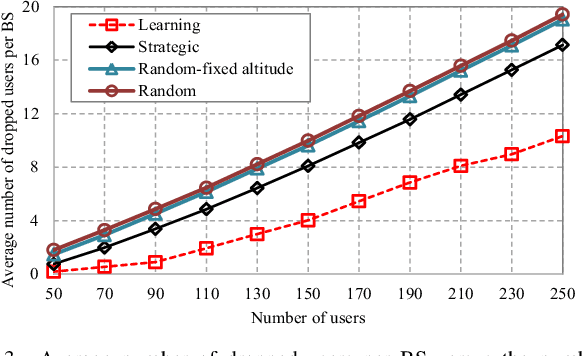
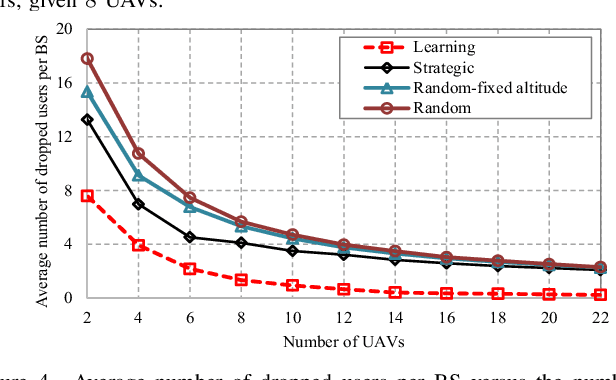
Deployment of unmanned aerial vehicles (UAVs) as aerial base stations can deliver a fast and flexible solution for serving varying traffic demand. In order to adequately benefit of UAVs deployment, their efficient placement is of utmost importance, and requires to intelligently adapt to the environment changes. In this paper, we propose a learning-based mechanism for the three-dimensional deployment of UAVs assisting terrestrial cellular networks in the downlink. The problem is modeled as a non-cooperative game among UAVs in satisfaction form. To solve the game, we utilize a low complexity algorithm, in which unsatisfied UAVs update their locations based on a learning algorithm. Simulation results reveal that the proposed UAV placement algorithm yields significant performance gains up to about 52% and 74% in terms of throughput and the number of dropped users, respectively, compared to an optimized baseline algorithm.