 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMillimeter-Wave Circular Synthetic Aperture Radar Imaging
Dec 22, 2020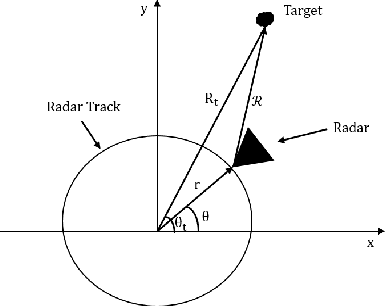
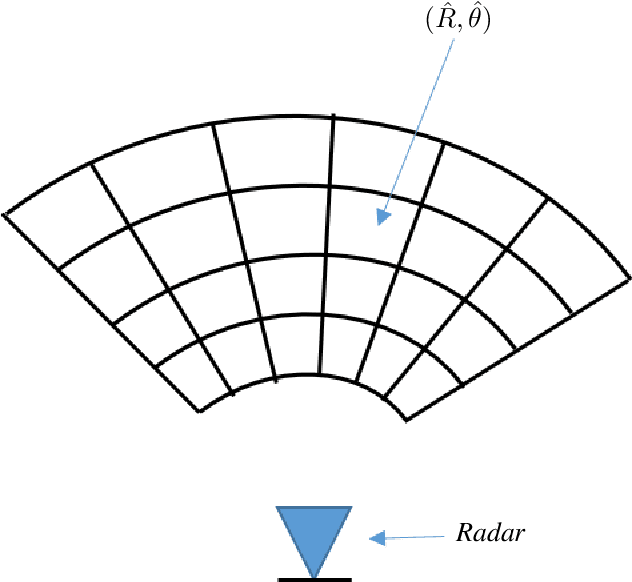
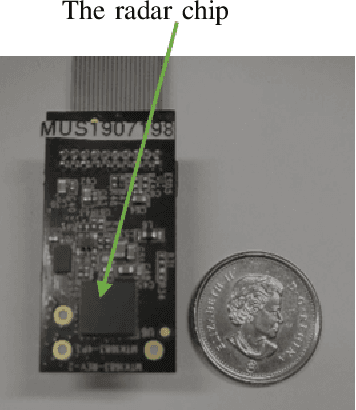
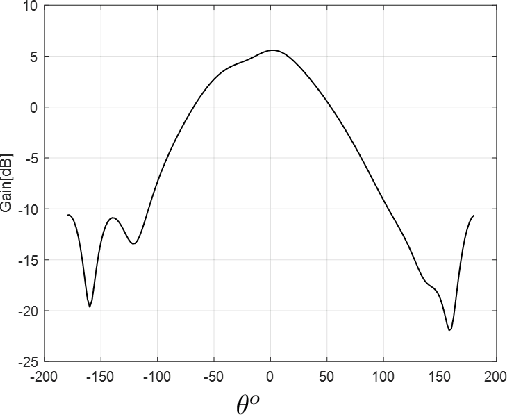
In this paper, we present a high resolution microwave imaging technique using a compact and low cost single channel Frequency Modulated Continuous Wave (FMCW) radar based on Circular Synthetic Aperture Radar (CSAR) technique. We develop an algorithm to reconstruct the image from the raw data and analyse different aspects of the system analytically. Furthermore, we discuss the differences between the proposed systems in the literature and the one presented in this work. Finally, we apply the proposed approach to the experimental data collected from a single channel FMCW radar operating at $\rm 79 \;GHz$ and present the results.
Learning in the Sky: An Efficient 3D Placement of UAVs
Mar 02, 2020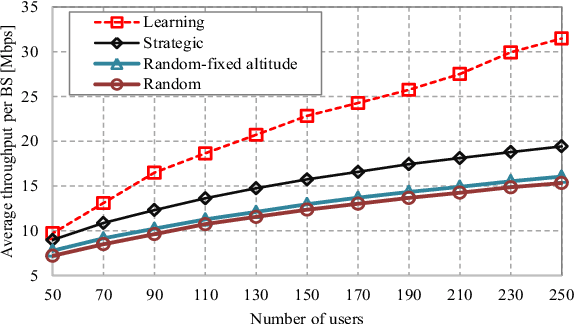
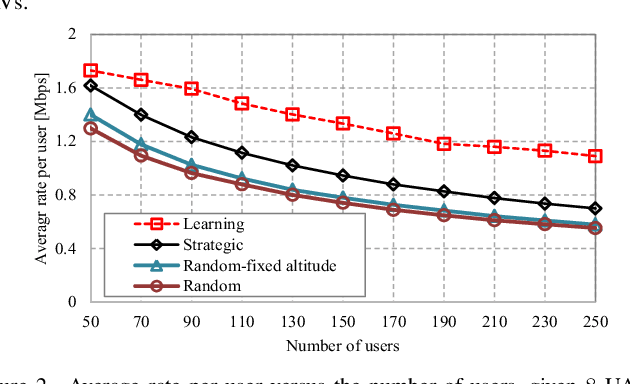
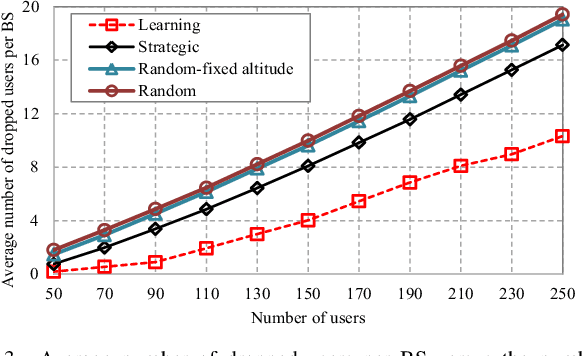
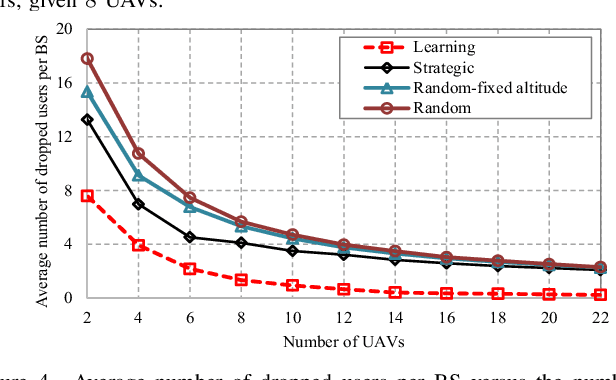
Deployment of unmanned aerial vehicles (UAVs) as aerial base stations can deliver a fast and flexible solution for serving varying traffic demand. In order to adequately benefit of UAVs deployment, their efficient placement is of utmost importance, and requires to intelligently adapt to the environment changes. In this paper, we propose a learning-based mechanism for the three-dimensional deployment of UAVs assisting terrestrial cellular networks in the downlink. The problem is modeled as a non-cooperative game among UAVs in satisfaction form. To solve the game, we utilize a low complexity algorithm, in which unsatisfied UAVs update their locations based on a learning algorithm. Simulation results reveal that the proposed UAV placement algorithm yields significant performance gains up to about 52% and 74% in terms of throughput and the number of dropped users, respectively, compared to an optimized baseline algorithm.