 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHeterogeneous Parallelism for Multimodal Large Language Model Training
May 26, 2026Foundation model training is becoming multimodal, from post-training pipelines to large-scale pretraining. As modality coverage broadens, context windows grow, and encoder LLM scales diverge, a single LLM-centric TP/CP/PP/DP/EP layout increasingly limits throughput. This coupling forces encoders to inherit LLM-driven sharding and placement choices that can add communication, limit encoder parallelism, or constrain the LLM schedule; the mismatch is most pronounced at long contexts, where LLM context parallelism is needed for the fused multimodal sequence but encoder inputs remain bounded. We present heterogeneous parallelism for multimodal large language model training, an abstraction that lets modules in one end-to-end graph use independent layouts and rank placements, supporting colocated execution on shared GPUs and non-colocated execution on disjoint rank sets. The key challenge is preserving boundary tensor semantics across independent layouts: forward activations must be materialized for the destination layout, while backward gradients must be routed back to the source layout. We address this with boundary communicators that implement forward and backward layout transforms, plus scheduling extensions for both placement modes. We evaluate optimized homogeneous, colocated heterogeneous, and non-colocated heterogeneous configurations across multimodal workloads and GPU scales to characterize when added layout and placement freedom exposes a better operating point. Across this sweep, colocated heterogeneity improves TFLOPS/GPU by up to 49.3%, while non-colocated heterogeneity improves aggregate token throughput by up to 13.0% and TFLOPS/GPU by up to 9.6%. We validate loss convergence parity against homogeneous baselines and release the system as an open-source Megatron-LM extension.
X-Token: Projection-Guided Cross-Tokenizer Knowledge Distillation
May 20, 2026Cross-tokenizer knowledge distillation allows a student model to learn from teachers with incompatible vocabularies. Prior work operates on hidden states or logits; the latter is preferred as a drop-in replacement requiring no auxiliary components. Logit-based methods either use only the correct-token probability, missing the full 'dark knowledge' in the teacher's distribution, or operate on the full output distribution, relying on strict token partitioning and/or unprincipled heuristic ranking. We identify two key shortcomings of full-distribution, logit-based methods: (i) an uncommon-token failure, where critical tokens fall into the unmatched subset (e.g., Llama's 1100 multi-digit numerals under digit-splitting Qwen supervision) and are suppressed during training, reducing GSM8k from 12.89 to 2.56 compared to same-tokenizer KD from a weaker teacher; and (ii) over-conservative matching, where strict 1-to-1 matching excludes near-equivalent tokens across surface forms. These failures require distinct remedies: eliminating the partition when critical tokens are misaligned, and refining it when alignment is reliable. We propose X-Token, an approach with two complementary loss formulations targeting these issues. P-KL removes partitioning and aligns the student's distribution with the teacher's via a sparse projection matrix W (initialized from tokenizer-level string rules) to address the uncommon-token failure. H-KL retains the hybrid form while relaxing matching to align each student token with its top-ranked teacher mapping under W. Both objectives share W and extend naturally to multiple teachers. Empirically, on Llama-3.2-1B, X-Token outperforms the current state of the art GOLD by +3.82 average points with a Qwen3-4B teacher and by +0.5 with a Phi-4-Mini teacher. Further, a two-teacher setup (Phi-4-mini + Llama-3B) improves over single-teacher distillation by +1.3 points.
Nemotron 3 Super: Open, Efficient Mixture-of-Experts Hybrid Mamba-Transformer Model for Agentic Reasoning
Apr 14, 2026We describe the pre-training, post-training, and quantization of Nemotron 3 Super, a 120 billion (active 12 billion) parameter hybrid Mamba-Attention Mixture-of-Experts model. Nemotron 3 Super is the first model in the Nemotron 3 family to 1) be pre-trained in NVFP4, 2) leverage LatentMoE, a new Mixture-of-Experts architecture that optimizes for both accuracy per FLOP and accuracy per parameter, and 3) include MTP layers for inference acceleration through native speculative decoding. We pre-trained Nemotron 3 Super on 25 trillion tokens followed by post-training using supervised fine tuning (SFT) and reinforcement learning (RL). The final model supports up to 1M context length and achieves comparable accuracy on common benchmarks, while also achieving up to 2.2x and 7.5x higher inference throughput compared to GPT-OSS-120B and Qwen3.5-122B, respectively. Nemotron 3 Super datasets, along with the base, post-trained, and quantized checkpoints, are open-sourced on HuggingFace.
Scalable Training of Mixture-of-Experts Models with Megatron Core
Mar 10, 2026Scaling Mixture-of-Experts (MoE) training introduces systems challenges absent in dense models. Because each token activates only a subset of experts, this sparsity allows total parameters to grow much faster than per-token computation, creating coupled constraints across memory, communication, and computation. Optimizing one dimension often shifts pressure to another, demanding co-design across the full system stack. We address these challenges for MoE training through integrated optimizations spanning memory (fine-grained recomputation, offloading, etc.), communication (optimized dispatchers, overlapping, etc.), and computation (Grouped GEMM, fusions, CUDA Graphs, etc.). The framework also provides Parallel Folding for flexible multi-dimensional parallelism, low-precision training support for FP8 and NVFP4, and efficient long-context training. On NVIDIA GB300 and GB200, it achieves 1,233/1,048 TFLOPS/GPU for DeepSeek-V3-685B and 974/919 TFLOPS/GPU for Qwen3-235B. As a performant, scalable, and production-ready open-source solution, it has been used across academia and industry for training MoE models ranging from billions to trillions of parameters on clusters scaling up to thousands of GPUs. This report explains how these techniques work, their trade-offs, and their interactions at the systems level, providing practical guidance for scaling MoE models with Megatron Core.
NVIDIA Nemotron 3: Efficient and Open Intelligence
Dec 24, 2025We introduce the Nemotron 3 family of models - Nano, Super, and Ultra. These models deliver strong agentic, reasoning, and conversational capabilities. The Nemotron 3 family uses a Mixture-of-Experts hybrid Mamba-Transformer architecture to provide best-in-class throughput and context lengths of up to 1M tokens. Super and Ultra models are trained with NVFP4 and incorporate LatentMoE, a novel approach that improves model quality. The two larger models also include MTP layers for faster text generation. All Nemotron 3 models are post-trained using multi-environment reinforcement learning enabling reasoning, multi-step tool use, and support granular reasoning budget control. Nano, the smallest model, outperforms comparable models in accuracy while remaining extremely cost-efficient for inference. Super is optimized for collaborative agents and high-volume workloads such as IT ticket automation. Ultra, the largest model, provides state-of-the-art accuracy and reasoning performance. Nano is released together with its technical report and this white paper, while Super and Ultra will follow in the coming months. We will openly release the model weights, pre- and post-training software, recipes, and all data for which we hold redistribution rights.
Nemotron 3 Nano: Open, Efficient Mixture-of-Experts Hybrid Mamba-Transformer Model for Agentic Reasoning
Dec 23, 2025We present Nemotron 3 Nano 30B-A3B, a Mixture-of-Experts hybrid Mamba-Transformer language model. Nemotron 3 Nano was pretrained on 25 trillion text tokens, including more than 3 trillion new unique tokens over Nemotron 2, followed by supervised fine tuning and large-scale RL on diverse environments. Nemotron 3 Nano achieves better accuracy than our previous generation Nemotron 2 Nano while activating less than half of the parameters per forward pass. It achieves up to 3.3x higher inference throughput than similarly-sized open models like GPT-OSS-20B and Qwen3-30B-A3B-Thinking-2507, while also being more accurate on popular benchmarks. Nemotron 3 Nano demonstrates enhanced agentic, reasoning, and chat abilities and supports context lengths up to 1M tokens. We release both our pretrained Nemotron 3 Nano 30B-A3B Base and post-trained Nemotron 3 Nano 30B-A3B checkpoints on Hugging Face.
NVIDIA Nemotron Nano 2: An Accurate and Efficient Hybrid Mamba-Transformer Reasoning Model
Aug 21, 2025



We introduce Nemotron-Nano-9B-v2, a hybrid Mamba-Transformer language model designed to increase throughput for reasoning workloads while achieving state-of-the-art accuracy compared to similarly-sized models. Nemotron-Nano-9B-v2 builds on the Nemotron-H architecture, in which the majority of the self-attention layers in the common Transformer architecture are replaced with Mamba-2 layers, to achieve improved inference speed when generating the long thinking traces needed for reasoning. We create Nemotron-Nano-9B-v2 by first pre-training a 12-billion-parameter model (Nemotron-Nano-12B-v2-Base) on 20 trillion tokens using an FP8 training recipe. After aligning Nemotron-Nano-12B-v2-Base, we employ the Minitron strategy to compress and distill the model with the goal of enabling inference on up to 128k tokens on a single NVIDIA A10G GPU (22GiB of memory, bfloat16 precision). Compared to existing similarly-sized models (e.g., Qwen3-8B), we show that Nemotron-Nano-9B-v2 achieves on-par or better accuracy on reasoning benchmarks while achieving up to 6x higher inference throughput in reasoning settings like 8k input and 16k output tokens. We are releasing Nemotron-Nano-9B-v2, Nemotron-Nano12B-v2-Base, and Nemotron-Nano-9B-v2-Base checkpoints along with the majority of our pre- and post-training datasets on Hugging Face.
MoE Parallel Folding: Heterogeneous Parallelism Mappings for Efficient Large-Scale MoE Model Training with Megatron Core
Apr 21, 2025



Mixture of Experts (MoE) models enhance neural network scalability by dynamically selecting relevant experts per input token, enabling larger model sizes while maintaining manageable computation costs. However, efficient training of large-scale MoE models across thousands of GPUs presents significant challenges due to limitations in existing parallelism strategies. We introduce an end-to-end training framework for large-scale MoE models that utilizes five-dimensional hybrid parallelism: Tensor Parallelism, Expert Parallelism, Context Parallelism, Data Parallelism, and Pipeline Parallelism. Central to our approach is MoE Parallel Folding, a novel strategy that decouples the parallelization of attention and MoE layers in Transformer models, allowing each layer type to adopt optimal parallel configurations. Additionally, we develop a flexible token-level dispatcher that supports both token-dropping and token-dropless MoE training across all five dimensions of parallelism. This dispatcher accommodates dynamic tensor shapes and coordinates different parallelism schemes for Attention and MoE layers, facilitating complex parallelism implementations. Our experiments demonstrate significant improvements in training efficiency and scalability. We achieve up to 49.3% Model Flops Utilization (MFU) for the Mixtral 8x22B model and 39.0% MFU for the Qwen2-57B-A14B model on H100 GPUs, outperforming existing methods. The framework scales efficiently up to 1,024 GPUs and maintains high performance with sequence lengths up to 128K tokens, validating its effectiveness for large-scale MoE model training. The code is available in Megatron-Core.
Efficient Hybrid Language Model Compression through Group-Aware SSM Pruning
Apr 15, 2025Hybrid LLM architectures that combine Attention and State Space Models (SSMs) achieve state-of-the-art accuracy and runtime performance. Recent work has demonstrated that applying compression and distillation to Attention-only models yields smaller, more accurate models at a fraction of the training cost. In this work, we explore the effectiveness of compressing Hybrid architectures. We introduce a novel group-aware pruning strategy that preserves the structural integrity of SSM blocks and their sequence modeling capabilities. Furthermore, we demonstrate the necessity of such SSM pruning to achieve improved accuracy and inference speed compared to traditional approaches. Our compression recipe combines SSM, FFN, embedding dimension, and layer pruning, followed by knowledge distillation-based retraining, similar to the MINITRON technique. Using this approach, we compress the Nemotron-H 8B Hybrid model down to 4B parameters with up to 40x fewer training tokens. The resulting model surpasses the accuracy of similarly-sized models while achieving 2x faster inference, significantly advancing the Pareto frontier.
Nemotron-H: A Family of Accurate and Efficient Hybrid Mamba-Transformer Models
Apr 10, 2025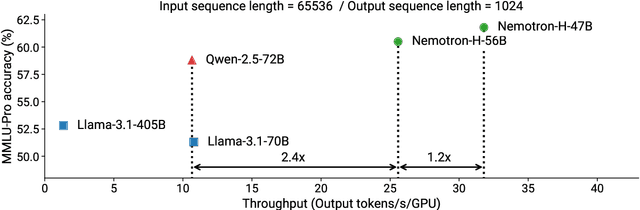

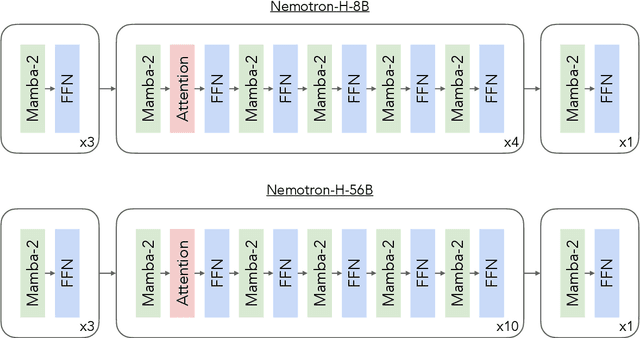
As inference-time scaling becomes critical for enhanced reasoning capabilities, it is increasingly becoming important to build models that are efficient to infer. We introduce Nemotron-H, a family of 8B and 56B/47B hybrid Mamba-Transformer models designed to reduce inference cost for a given accuracy level. To achieve this goal, we replace the majority of self-attention layers in the common Transformer model architecture with Mamba layers that perform constant computation and require constant memory per generated token. We show that Nemotron-H models offer either better or on-par accuracy compared to other similarly-sized state-of-the-art open-sourced Transformer models (e.g., Qwen-2.5-7B/72B and Llama-3.1-8B/70B), while being up to 3$\times$ faster at inference. To further increase inference speed and reduce the memory required at inference time, we created Nemotron-H-47B-Base from the 56B model using a new compression via pruning and distillation technique called MiniPuzzle. Nemotron-H-47B-Base achieves similar accuracy to the 56B model, but is 20% faster to infer. In addition, we introduce an FP8-based training recipe and show that it can achieve on par results with BF16-based training. This recipe is used to train the 56B model. All Nemotron-H models will be released, with support in Hugging Face, NeMo, and Megatron-LM.