 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLocomotion on Constrained Footholds via Layered Architectures and Model Predictive Control
Jun 11, 2025



Computing stabilizing and optimal control actions for legged locomotion in real time is difficult due to the nonlinear, hybrid, and high dimensional nature of these robots. The hybrid nature of the system introduces a combination of discrete and continuous variables which causes issues for numerical optimal control. To address these challenges, we propose a layered architecture that separates the choice of discrete variables and a smooth Model Predictive Controller (MPC). The layered formulation allows for online flexibility and optimality without sacrificing real-time performance through a combination of gradient-free and gradient-based methods. The architecture leverages a sampling-based method for determining discrete variables, and a classical smooth MPC formulation using these fixed discrete variables. We demonstrate the results on a quadrupedal robot stepping over gaps and onto terrain with varying heights. In simulation, we demonstrate the controller on a humanoid robot for gap traversal. The layered approach is shown to be more optimal and reliable than common heuristic-based approaches and faster to compute than pure sampling methods.
SHIELD: Safety on Humanoids via CBFs In Expectation on Learned Dynamics
May 16, 2025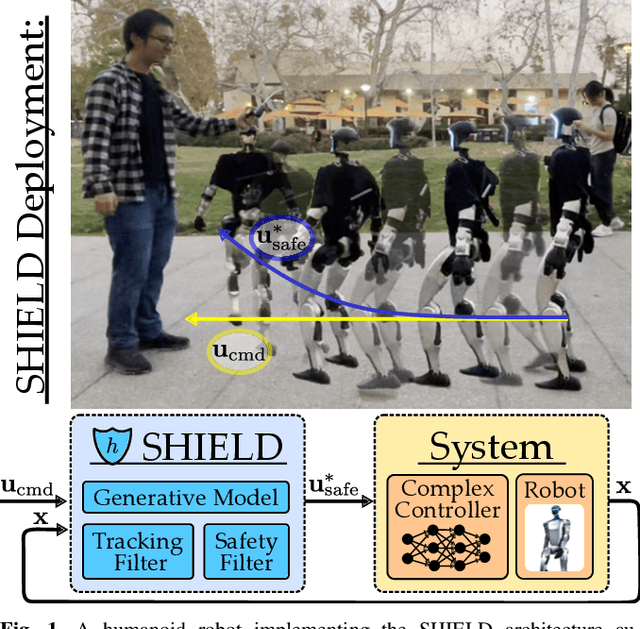
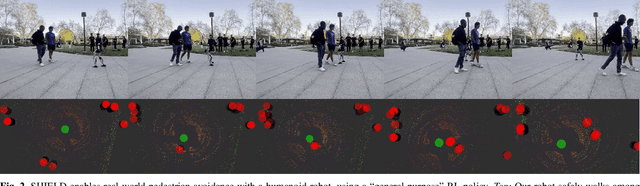
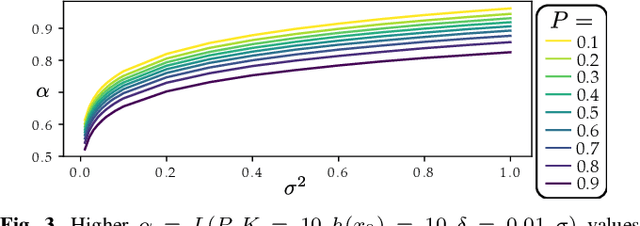
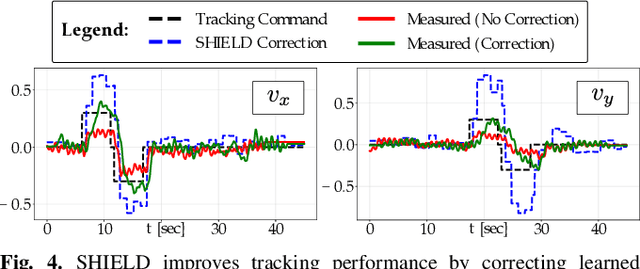
Robot learning has produced remarkably effective ``black-box'' controllers for complex tasks such as dynamic locomotion on humanoids. Yet ensuring dynamic safety, i.e., constraint satisfaction, remains challenging for such policies. Reinforcement learning (RL) embeds constraints heuristically through reward engineering, and adding or modifying constraints requires retraining. Model-based approaches, like control barrier functions (CBFs), enable runtime constraint specification with formal guarantees but require accurate dynamics models. This paper presents SHIELD, a layered safety framework that bridges this gap by: (1) training a generative, stochastic dynamics residual model using real-world data from hardware rollouts of the nominal controller, capturing system behavior and uncertainties; and (2) adding a safety layer on top of the nominal (learned locomotion) controller that leverages this model via a stochastic discrete-time CBF formulation enforcing safety constraints in probability. The result is a minimally-invasive safety layer that can be added to the existing autonomy stack to give probabilistic guarantees of safety that balance risk and performance. In hardware experiments on an Unitree G1 humanoid, SHIELD enables safe navigation (obstacle avoidance) through varied indoor and outdoor environments using a nominal (unknown) RL controller and onboard perception.
Bracing for Impact: Robust Humanoid Push Recovery and Locomotion with Reduced Order Models
May 16, 2025



Push recovery during locomotion will facilitate the deployment of humanoid robots in human-centered environments. In this paper, we present a unified framework for walking control and push recovery for humanoid robots, leveraging the arms for push recovery while dynamically walking. The key innovation is to use the environment, such as walls, to facilitate push recovery by combining Single Rigid Body model predictive control (SRB-MPC) with Hybrid Linear Inverted Pendulum (HLIP) dynamics to enable robust locomotion, push detection, and recovery by utilizing the robot's arms to brace against such walls and dynamically adjusting the desired contact forces and stepping patterns. Extensive simulation results on a humanoid robot demonstrate improved perturbation rejection and tracking performance compared to HLIP alone, with the robot able to recover from pushes up to 100N for 0.2s while walking at commanded speeds up to 0.5m/s. Robustness is further validated in scenarios with angled walls and multi-directional pushes.
Secure Safety Filter: Towards Safe Flight Control under Sensor Attacks
May 11, 2025Modern autopilot systems are prone to sensor attacks that can jeopardize flight safety. To mitigate this risk, we proposed a modular solution: the secure safety filter, which extends the well-established control barrier function (CBF)-based safety filter to account for, and mitigate, sensor attacks. This module consists of a secure state reconstructor (which generates plausible states) and a safety filter (which computes the safe control input that is closest to the nominal one). Differing from existing work focusing on linear, noise-free systems, the proposed secure safety filter handles bounded measurement noise and, by leveraging reduced-order model techniques, is applicable to the nonlinear dynamics of drones. Software-in-the-loop simulations and drone hardware experiments demonstrate the effectiveness of the secure safety filter in rendering the system safe in the presence of sensor attacks.
Dynamic Safety in Complex Environments: Synthesizing Safety Filters with Poisson's Equation
May 11, 2025



Synthesizing safe sets for robotic systems operating in complex and dynamically changing environments is a challenging problem. Solving this problem can enable the construction of safety filters that guarantee safe control actions -- most notably by employing Control Barrier Functions (CBFs). This paper presents an algorithm for generating safe sets from perception data by leveraging elliptic partial differential equations, specifically Poisson's equation. Given a local occupancy map, we solve Poisson's equation subject to Dirichlet boundary conditions, with a novel forcing function. Specifically, we design a smooth guidance vector field, which encodes gradient information required for safety. The result is a variational problem for which the unique minimizer -- a safety function -- characterizes the safe set. After establishing our theoretical result, we illustrate how safety functions can be used in CBF-based safety filtering. The real-time utility of our synthesis method is highlighted through hardware demonstrations on quadruped and humanoid robots navigating dynamically changing obstacle-filled environments.
Robust Push Recovery on Bipedal Robots: Leveraging Multi-Domain Hybrid Systems with Reduced-Order Model Predictive Control
Apr 25, 2025In this paper, we present a novel control framework to achieve robust push recovery on bipedal robots while locomoting. The key contribution is the unification of hybrid system models of locomotion with a reduced-order model predictive controller determining: foot placement, step timing, and ankle control. The proposed reduced-order model is an augmented Linear Inverted Pendulum model with zero moment point coordinates; this is integrated within a model predictive control framework for robust stabilization under external disturbances. By explicitly leveraging the hybrid dynamics of locomotion, our approach significantly improves stability and robustness across varying walking heights, speeds, step durations, and is effective for both flat-footed and more complex multi-domain heel-to-toe walking patterns. The framework is validated with high-fidelity simulation on Cassie, a 3D underactuated robot, showcasing real-time feasibility and substantially improved stability. The results demonstrate the robustness of the proposed method in dynamic environments.
Reduced-Order Model Guided Contact-Implicit Model Predictive Control for Humanoid Locomotion
Feb 21, 2025Humanoid robots have great potential for real-world applications due to their ability to operate in environments built for humans, but their deployment is hindered by the challenge of controlling their underlying high-dimensional nonlinear hybrid dynamics. While reduced-order models like the Hybrid Linear Inverted Pendulum (HLIP) are simple and computationally efficient, they lose whole-body expressiveness. Meanwhile, recent advances in Contact-Implicit Model Predictive Control (CI-MPC) enable robots to plan through multiple hybrid contact modes, but remain vulnerable to local minima and require significant tuning. We propose a control framework that combines the strengths of HLIP and CI-MPC. The reduced-order model generates a nominal gait, while CI-MPC manages the whole-body dynamics and modifies the contact schedule as needed. We demonstrate the effectiveness of this approach in simulation with a novel 24 degree-of-freedom humanoid robot: Achilles. Our proposed framework achieves rough terrain walking, disturbance recovery, robustness under model and state uncertainty, and allows the robot to interact with obstacles in the environment, all while running online in real-time at 50 Hz.
Learning for Layered Safety-Critical Control with Predictive Control Barrier Functions
Dec 05, 2024Safety filters leveraging control barrier functions (CBFs) are highly effective for enforcing safe behavior on complex systems. It is often easier to synthesize CBFs for a Reduced order Model (RoM), and track the resulting safe behavior on the Full order Model (FoM) -- yet gaps between the RoM and FoM can result in safety violations. This paper introduces \emph{predictive CBFs} to address this gap by leveraging rollouts of the FoM to define a predictive robustness term added to the RoM CBF condition. Theoretically, we prove that this guarantees safety in a layered control implementation. Practically, we learn the predictive robustness term through massive parallel simulation with domain randomization. We demonstrate in simulation that this yields safe FoM behavior with minimal conservatism, and experimentally realize predictive CBFs on a 3D hopping robot.
Zero-order Control Barrier Functions for Sampled-Data Systems with State and Input Dependent Safety Constraints
Nov 26, 2024


We propose a novel zero-order control barrier function (ZOCBF) for sampled-data systems to ensure system safety. Our formulation generalizes conventional control barrier functions and straightforwardly handles safety constraints with high-relative degrees or those that explicitly depend on both system states and inputs. The proposed ZOCBF condition does not require any differentiation operation. Instead, it involves computing the difference of the ZOCBF values at two consecutive sampling instants. We propose three numerical approaches to enforce the ZOCBF condition, tailored to different problem settings and available computational resources. We demonstrate the effectiveness of our approach through a collision avoidance example and a rollover prevention example on uneven terrains.
Safety-Critical Controller Synthesis with Reduced-Order Models
Nov 25, 2024



Reduced-order models (ROMs) provide lower dimensional representations of complex systems, capturing their salient features while simplifying control design. Building on previous work, this paper presents an overarching framework for the integration of ROMs and control barrier functions, enabling the use of simplified models to construct safety-critical controllers while providing safety guarantees for complex full-order models. To achieve this, we formalize the connection between full and ROMs by defining projection mappings that relate the states and inputs of these models and leverage simulation functions to establish conditions under which safety guarantees may be transferred from a ROM to its corresponding full-order model. The efficacy of our framework is illustrated through simulation results on a drone and hardware demonstrations on ARCHER, a 3D hopping robot.